|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
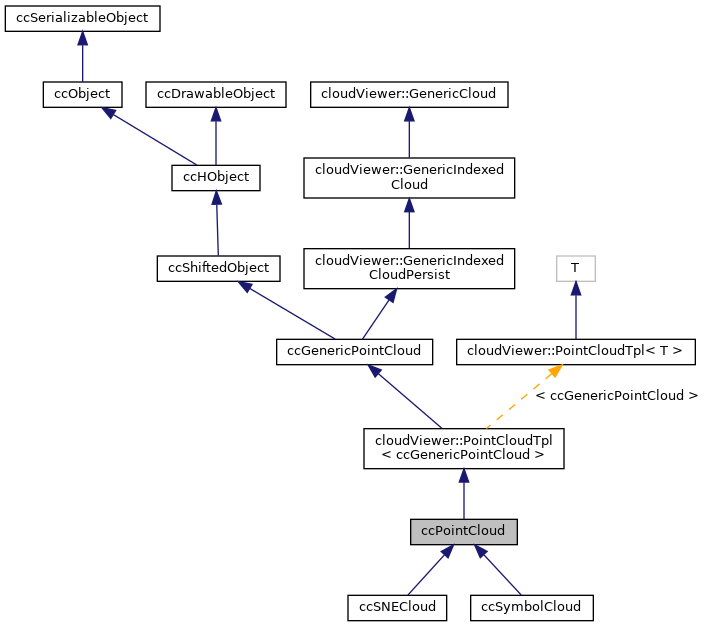
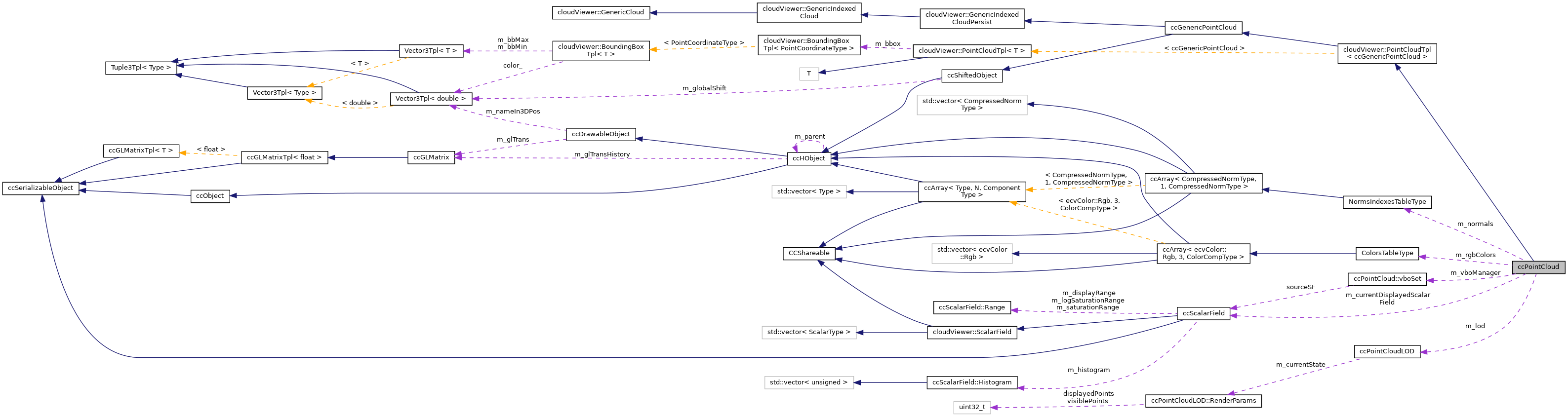
A 3D cloud and its associated features (color, normals, scalar fields, etc.) More...
#include <ecvPointCloud.h>
Classes | |
| struct | Grid |
| Grid structure. More... | |
| struct | RgbFilterOptions |
| RGB filter options. More... | |
| struct | UnrollBaseParams |
| struct | UnrollConeParams |
| struct | UnrollCylinderParams |
| class | VBO |
| struct | vboSet |
| VBO set. More... | |
Public Types | |
| enum | CLONE_WARNINGS { WRN_OUT_OF_MEM_FOR_COLORS = 1 , WRN_OUT_OF_MEM_FOR_NORMALS = 2 , WRN_OUT_OF_MEM_FOR_SFS = 4 , WRN_OUT_OF_MEM_FOR_FWF = 8 } |
| Warnings for the partialClone method (bit flags) More... | |
| enum | RGB_FILTER_TYPES { NONE , BILATERAL , GAUSSIAN , MEAN , MEDIAN } |
| RGB filter types. More... | |
| enum | UnrollMode { CYLINDER = 0 , CONE = 1 , STRAIGHTENED_CONE = 2 , STRAIGHTENED_CONE2 = 3 } |
| using | BaseClass = cloudViewer::PointCloudTpl< ccGenericPointCloud > |
| Base class (shortcut) More... | |
| using | FWFDescriptorSet = QMap< uint8_t, WaveformDescriptor > |
| Waveform descriptors set. More... | |
| using | FWFDataContainer = std::vector< uint8_t > |
| Waveform data container. More... | |
| using | SharedFWFDataContainer = QSharedPointer< const FWFDataContainer > |
 Public Types inherited from ccGenericPointCloud Public Types inherited from ccGenericPointCloud | |
| using | VisibilityTableType = std::vector< unsigned char > |
| Array of "visibility" information for each point. More... | |
| Public Types inherited from ccHObject | |
| enum | DEPENDENCY_FLAGS { DP_NONE = 0 , DP_NOTIFY_OTHER_ON_DELETE = 1 , DP_NOTIFY_OTHER_ON_UPDATE , DP_DELETE_OTHER = 8 , DP_PARENT_OF_OTHER = 24 } |
| Dependency flags. More... | |
| enum | SelectionBehavior { SELECTION_AA_BBOX , SELECTION_FIT_BBOX , SELECTION_IGNORED } |
| Behavior when selected. More... | |
| using | Container = std::vector< ccHObject * > |
| Standard instances container (for children, etc.) More... | |
| using | Shared = QSharedPointer< ccHObject > |
| Shared pointer. More... | |
| using | SharedContainer = std::vector< Shared > |
| Shared instances container (for children, etc.) More... | |
| using | GlobalBoundingBox = cloudViewer::BoundingBoxTpl< double > |
| Global (non-shifted) bounding-box. More... | |
| Public Types inherited from ccSerializableObject | |
| enum | DeserializationFlags { DF_POINT_COORDS_64_BITS , DF_SCALAR_VAL_32_BITS = 2 } |
| Deserialization flags (bit-field) More... | |
| typedef QMultiMap< unsigned, unsigned > | LoadedIDMap |
| Map of loaded unique IDs (old ID --> new ID) More... | |
| Public Types inherited from cloudViewer::GenericCloud | |
| using | genericPointAction = std::function< void(const CCVector3 &, ScalarType &)> |
| Generic function applied to a point (used by foreach) More... | |
Public Member Functions | |
| ccPointCloud (QString name=QString()) throw () | |
| Default constructor. More... | |
| ccPointCloud (const ccPointCloud &cloud) | |
| ccPointCloud (const std::vector< Eigen::Vector3d > &points, const std::string &name="cloud") | |
| ~ccPointCloud () override | |
| Default destructor. More... | |
| CV_CLASS_ENUM | getClassID () const override |
| Returns class ID. More... | |
| ccPointCloud * | partialClone (const cloudViewer::ReferenceCloud *selection, int *warnings=nullptr, bool withChildEntities=true) const |
| Creates a new point cloud object from a ReferenceCloud (selection) More... | |
| ccPointCloud * | cloneThis (ccPointCloud *destCloud=nullptr, bool ignoreChildren=false) |
| Clones this entity. More... | |
| ccGenericPointCloud * | clone (ccGenericPointCloud *destCloud=nullptr, bool ignoreChildren=false) override |
| Clones this entity. More... | |
| ccPointCloud & | operator= (const ccPointCloud &cloud) |
| Fuses another 3D entity with this one. More... | |
| const ccPointCloud & | operator+= (const ccPointCloud &cloud) |
| const ccPointCloud & | operator+= (ccPointCloud *) |
| ccPointCloud | operator+ (const ccPointCloud &cloud) const |
| void | clear () override |
| Clears the entity from all its points and features. More... | |
| void | unalloactePoints () |
| Erases the cloud points. More... | |
| void | unallocateColors () |
| Erases the cloud colors. More... | |
| void | unallocateNorms () |
| Erases the cloud normals. More... | |
| void | colorsHaveChanged () |
| void | normalsHaveChanged () |
| Notify a modification of normals display parameters or contents. More... | |
| void | pointsHaveChanged () |
| Notify a modification of points display parameters or contents. More... | |
| bool | reserve (unsigned numberOfPoints) override |
| Reserves memory for all the active features. More... | |
| bool | reserveThePointsTable (unsigned _numberOfPoints) |
| Reserves memory to store the points coordinates. More... | |
| bool | reserveTheRGBTable () |
| Reserves memory to store the RGB colors. More... | |
| bool | reserveTheNormsTable () |
| Reserves memory to store the compressed normals. More... | |
| bool | resize (unsigned numberOfPoints) override |
| Resizes all the active features arrays. More... | |
| bool | resizeTheRGBTable (bool fillWithWhite=false) |
| Resizes the RGB colors array. More... | |
| bool | resizeTheNormsTable () |
| Resizes the compressed normals array. More... | |
| void | shrinkToFit () |
| Removes unused capacity. More... | |
| ccScalarField * | getCurrentDisplayedScalarField () const |
| Returns the currently displayed scalar (or 0 if none) More... | |
| int | getCurrentDisplayedScalarFieldIndex () const |
| Returns the currently displayed scalar field index (or -1 if none) More... | |
| void | setCurrentDisplayedScalarField (int index) |
| Sets the currently displayed scalar field. More... | |
| void | deleteScalarField (int index) override |
| Deletes a specific scalar field. More... | |
| void | deleteAllScalarFields () override |
| Deletes all scalar fields associated to this cloud. More... | |
| int | addScalarField (const char *uniqueName) override |
| Creates a new scalar field and registers it. More... | |
| bool | sfColorScaleShown () const |
| Returns whether color scale should be displayed or not. More... | |
| void | showSFColorsScale (bool state) |
| Sets whether color scale should be displayed or not. More... | |
| size_t | gridCount () const |
| Returns the number of associated grids. More... | |
| Grid::Shared & | grid (size_t gridIndex) |
| Returns an associated grid. More... | |
| const Grid::Shared & | grid (size_t gridIndex) const |
| Returns an associated grid (const verson) More... | |
| bool | addGrid (Grid::Shared grid) |
| Adds an associated grid. More... | |
| void | removeGrids () |
| Remove all associated grids. More... | |
| ccMesh * | triangulateGrid (const Grid &grid, double minTriangleAngle_deg=0.0) const |
| Meshes a scan grid. More... | |
| bool | computeNormalsWithGrids (double minTriangleAngle_deg=1.0, ecvProgressDialog *pDlg=nullptr) |
| Compute the normals with the associated grid structure(s) More... | |
| bool | orientNormalsWithGrids (ecvProgressDialog *pDlg=nullptr) |
| Orient the normals with the associated grid structure(s) More... | |
| bool | orientNormalsTowardViewPoint (CCVector3 &VP, ecvProgressDialog *pDlg=nullptr) |
| Normals are forced to point to O. More... | |
| bool | computeNormalsWithOctree (CV_LOCAL_MODEL_TYPES model, ccNormalVectors::Orientation preferredOrientation, PointCoordinateType defaultRadius, ecvProgressDialog *pDlg=nullptr) |
| Compute the normals by approximating the local surface around each point. More... | |
| bool | orientNormalsWithMST (unsigned kNN=6, ecvProgressDialog *pDlg=nullptr) |
| Orient the normals with a Minimum Spanning Tree. More... | |
| bool | orientNormalsWithFM (unsigned char level, ecvProgressDialog *pDlg=nullptr) |
| Orient normals with Fast Marching. More... | |
| bool | hasFWF () const |
| Returns whether the cloud has associated Full WaveForm data. More... | |
| ccWaveformProxy | waveformProxy (unsigned index) const |
| Returns a proxy on a given waveform. More... | |
| FWFDescriptorSet & | fwfDescriptors () |
| Gives access to the FWF descriptors. More... | |
| const FWFDescriptorSet & | fwfDescriptors () const |
| Gives access to the FWF descriptors (const version) More... | |
| std::vector< ccWaveform > & | waveforms () |
| Gives access to the associated FWF data. More... | |
| const std::vector< ccWaveform > & | waveforms () const |
| Gives access to the associated FWF data (const version) More... | |
| bool | reserveTheFWFTable () |
| Reserves the FWF table. More... | |
| bool | resizeTheFWFTable () |
| Resizes the FWF table. More... | |
| SharedFWFDataContainer & | fwfData () |
| Gives access to the associated FWF data container. More... | |
| const SharedFWFDataContainer & | fwfData () const |
| Gives access to the associated FWF data container (const version) More... | |
| bool | compressFWFData () |
| Compresses the associated FWF data container. More... | |
| bool | computeFWFAmplitude (double &minVal, double &maxVal, ecvProgressDialog *pDlg=nullptr) const |
| Computes the maximum amplitude of all associated waveforms. More... | |
| void | clearFWFData () |
| Clears all associated FWF data. More... | |
| CCVector3 | computeGravityCenter () |
| Returns the cloud gravity center. More... | |
| void | invalidateBoundingBox () override |
| Invalidates bounding box. More... | |
| void | getDrawingParameters (glDrawParams ¶ms) const override |
| Returns main OpenGL parameters for this entity. More... | |
| unsigned | getUniqueIDForDisplay () const override |
| Returns object unqiue ID used for display. More... | |
| bool | hasColors () const override |
| Returns whether colors are enabled or not. More... | |
| bool | hasNormals () const override |
| Returns whether normals are enabled or not. More... | |
| bool | hasScalarFields () const override |
| Returns whether one or more scalar fields are instantiated. More... | |
| bool | hasDisplayedScalarField () const override |
| Returns whether an active scalar field is available or not. More... | |
| unsigned char | testVisibility (const CCVector3 &P) const override |
| bool | normalsAvailable () const override |
| Returns whether normals are available. More... | |
| const CCVector3 * | getNormal (unsigned pointIndex) const override |
| If per-point normals are available, returns the one at a specific index. More... | |
| const ecvColor::Rgb * | getScalarValueColor (ScalarType d) const override |
| Returns color corresponding to a given scalar value. More... | |
| const ecvColor::Rgb * | getPointScalarValueColor (unsigned pointIndex) const override |
| Returns color corresponding to a given point associated scalar value. More... | |
| ScalarType | getPointDisplayedDistance (unsigned pointIndex) const override |
| Returns scalar value associated to a given point. More... | |
| const ecvColor::Rgb & | getPointColor (unsigned pointIndex) const override |
| Returns color corresponding to a given point. More... | |
| const ColorsTableType & | getPointColors () const |
| ecvColor::Rgb & | getPointColorPtr (size_t pointIndex) |
| Eigen::Vector3d | getEigenColor (size_t index) const |
| std::vector< Eigen::Vector3d > | getEigenColors () const |
| void | setEigenColors (const std::vector< Eigen::Vector3d > &colors) |
| const CompressedNormType & | getPointNormalIndex (unsigned pointIndex) const override |
| Returns compressed normal corresponding to a given point. More... | |
| const CCVector3 & | getPointNormal (unsigned pointIndex) const override |
| Returns normal corresponding to a given point. More... | |
| CCVector3 & | getPointNormalPtr (size_t pointIndex) const |
| std::vector< CCVector3 > | getPointNormals () const |
| std::vector< CCVector3 * > | getPointNormalsPtr () const |
| void | setPointNormals (const std::vector< CCVector3 > &normals) |
| Eigen::Vector3d | getEigenNormal (size_t index) const |
| std::vector< Eigen::Vector3d > | getEigenNormals () const |
| void | setEigenNormals (const std::vector< Eigen::Vector3d > &normals) |
| cloudViewer::ReferenceCloud * | crop (const ccBBox &box, bool inside=true) override |
| Crops the cloud inside (or outside) a bounding box. More... | |
| cloudViewer::ReferenceCloud * | crop (const ecvOrientedBBox &bbox) override |
| virtual void | applyRigidTransformation (const ccGLMatrix &trans) override |
| Applies a rigid transformation (rotation + translation) More... | |
| virtual void | scale (PointCoordinateType fx, PointCoordinateType fy, PointCoordinateType fz, CCVector3 center=CCVector3(0, 0, 0)) override |
| Multiplies all coordinates by constant factors (one per dimension) More... | |
| void | refreshBB () override |
| Forces bounding-box update. More... | |
| ccGenericPointCloud * | createNewCloudFromVisibilitySelection (bool removeSelectedPoints=false, VisibilityTableType *visTable=nullptr, std::vector< int > *newIndexesOfRemainingPoints=nullptr, bool silent=false, cloudViewer::ReferenceCloud *selection=nullptr) override |
| bool | removeVisiblePoints (VisibilityTableType *visTable=nullptr, std::vector< int > *newIndexes=nullptr) override |
| Removes all the 'visible' points (as defined by the visibility array) More... | |
| void | enableVisibilityCheck (bool state) |
| bool | hasSensor () const |
| Returns whether the mesh as an associated sensor or not. More... | |
| QSharedPointer< cloudViewer::ReferenceCloud > | computeCPSet (ccGenericPointCloud &otherCloud, cloudViewer::GenericProgressCallback *progressCb=nullptr, unsigned char octreeLevel=0) |
| Computes the closest point of this cloud relatively to another cloud. More... | |
| bool | interpolateColorsFrom (ccGenericPointCloud *cloud, cloudViewer::GenericProgressCallback *progressCb=nullptr, unsigned char octreeLevel=0) |
| Interpolate colors from another cloud (nearest neighbor only) More... | |
| void | setPointColor (size_t pointIndex, const ecvColor::Rgb &col) |
| Sets a particular point color. More... | |
| void | setPointColor (size_t pointIndex, const ecvColor::Rgba &col) |
| void | setPointColor (size_t pointIndex, const Eigen::Vector3d &col) |
| void | setEigenColor (size_t index, const Eigen::Vector3d &color) |
| void | setPointNormalIndex (size_t pointIndex, CompressedNormType norm) |
| Sets a particular point compressed normal. More... | |
| void | setPointNormal (size_t pointIndex, const CCVector3 &N) |
| Sets a particular point normal (shortcut) More... | |
| void | setEigenNormal (size_t index, const Eigen::Vector3d &normal) |
| void | addNormIndex (CompressedNormType index) |
| Pushes a compressed normal vector. More... | |
| void | addNorm (const CCVector3 &N) |
| Pushes a normal vector on stack (shortcut) More... | |
| void | addEigenNorm (const Eigen::Vector3d &N) |
| void | addEigenNorms (const std::vector< Eigen::Vector3d > &normals) |
| void | addNorms (const std::vector< CCVector3 > &Ns) |
| void | addNorms (const std::vector< CompressedNormType > &idxes) |
| std::vector< CompressedNormType > | getNorms () const |
| void | getNorms (std::vector< CompressedNormType > &idxes) const |
| void | addNormAtIndex (const PointCoordinateType *N, unsigned index) |
| Adds a normal vector to the one at a specific index. More... | |
| void | setNormsTable (NormsIndexesTableType *norms) |
| Sets the (compressed) normals table. More... | |
| bool | convertNormalToRGB () |
| Converts normals to RGB colors. More... | |
| bool | convertNormalToDipDirSFs (ccScalarField *dipSF, ccScalarField *dipDirSF) |
| Converts normals to two scalar fields: 'dip' and 'dip direction'. More... | |
| void | addRGBColor (const ecvColor::Rgb &C) |
| Pushes an RGB color on stack. More... | |
| void | addRGBColors (const std::vector< ecvColor::Rgb > &colors) |
| void | addEigenColor (const Eigen::Vector3d &color) |
| void | addEigenColors (const std::vector< Eigen::Vector3d > &colors) |
| void | addRGBColor (ColorCompType r, ColorCompType g, ColorCompType b) |
| Pushes an RGB color on stack (shortcut) More... | |
| void | addGreyColor (ColorCompType g) |
| Pushes a grey color on stack (shortcut) More... | |
| bool | convertRGBToGreyScale () |
| Converts RGB to grey scale colors. More... | |
| bool | colorize (float r, float g, float b) |
| Multiplies all color components of all points by coefficients. More... | |
| bool | setRGBColorByHeight (unsigned char heightDim, ccColorScale::Shared colorScale) |
| Assigns color to points proportionnaly to their 'height'. More... | |
| bool | setRGBColorByBanding (unsigned char dim, double freq) |
| Assigns color to points by 'banding'. More... | |
| bool | convertCurrentScalarFieldToColors (bool mixWithExistingColor=false) |
| bool | setRGBColorWithCurrentScalarField (bool mixWithExistingColor=false) |
| Sets RGB colors with current scalar field (values & parameters) More... | |
| bool | setRGBColor (ColorCompType r, ColorCompType g, ColorCompType b) |
| Set a unique color for the whole cloud (shortcut) More... | |
| bool | setRGBColor (const ecvColor::Rgb &col) |
| Set a unique color for the whole cloud. More... | |
| bool | applyFilterToRGB (PointCoordinateType sigma, PointCoordinateType sigmaSF, RgbFilterOptions filterParams, cloudViewer::GenericProgressCallback *progressCb=nullptr) |
| Applies a spatial Gaussian filter on RGB colors. More... | |
| void | invertNormals () |
| Inverts normals (if any) More... | |
| ccPointCloud * | filterPointsByScalarValue (ScalarType minVal, ScalarType maxVal, bool outside=false) |
| Filters out points whose scalar values falls into an interval. More... | |
| ccPointCloud * | filterPointsByScalarValue (std::vector< ScalarType > values, bool outside=false) |
| Filters out points whose scalar values falls into an interval. More... | |
| void | hidePointsByScalarValue (ScalarType minVal, ScalarType maxVal) |
| Hides points whose scalar values falls into an interval. More... | |
| void | hidePointsByScalarValue (std::vector< ScalarType > values) |
| Hides points whose scalar values falls into an interval. More... | |
| ccPointCloud * | unroll (UnrollMode mode, UnrollBaseParams *params, bool exportDeviationSF=false, double startAngle_deg=0.0, double stopAngle_deg=360.0, cloudViewer::GenericProgressCallback *progressCb=nullptr) const |
| Unrolls the cloud and its normals on a cylinder or a cone. More... | |
| void | addColorRampInfo (CC_DRAW_CONTEXT &context) |
| Adds associated SF color ramp info to current GL context. More... | |
| int | addScalarField (ccScalarField *sf) |
| Adds an existing scalar field to this cloud. More... | |
| ColorsTableType * | rgbColors () const |
| Returns pointer on RGB colors table. More... | |
| NormsIndexesTableType * | normals () const |
| Returns pointer on compressed normals indexes table. More... | |
| cloudViewer::ReferenceCloud * | crop2D (const ccPolyline *poly, unsigned char orthoDim, bool inside=true) |
| Crops the cloud inside (or outside) a 2D polyline. More... | |
| const ccPointCloud & | append (ccPointCloud *cloud, unsigned pointCountBefore, bool ignoreChildren=false) |
| Appends a cloud to this one. More... | |
| bool | enhanceRGBWithIntensitySF (int sfIdx, bool useCustomIntensityRange=false, double minI=0.0, double maxI=1.0) |
| bool | exportCoordToSF (bool exportDims[3]) |
| Exports the specified coordinate dimension(s) to scalar field(s) More... | |
| bool | setCoordFromSF (bool importDims[3], cloudViewer::ScalarField *sf, PointCoordinateType defaultValueForNaN) |
| Sets coordinate(s) from a scalar field. More... | |
| bool | exportNormalToSF (bool exportDims[3]) |
| Exports the specified normal dimension(s) to scalar field(s) More... | |
| virtual bool | IsEmpty () const override |
| virtual Eigen::Vector3d | GetMinBound () const override |
| Returns min bounds for geometry coordinates. More... | |
| virtual Eigen::Vector3d | GetMaxBound () const override |
| Returns max bounds for geometry coordinates. More... | |
| virtual Eigen::Vector3d | GetCenter () const override |
| Returns the center of the geometry coordinates. More... | |
| virtual ccBBox | GetAxisAlignedBoundingBox () const override |
| Returns an axis-aligned bounding box of the geometry. More... | |
| virtual ecvOrientedBBox | GetOrientedBoundingBox () const override |
| virtual ccPointCloud & | Transform (const Eigen::Matrix4d &trans) override |
| Apply transformation (4x4 matrix) to the geometry coordinates. More... | |
| virtual ccPointCloud & | Translate (const Eigen::Vector3d &translation, bool relative=true) override |
| Apply translation to the geometry coordinates. More... | |
| ccPointCloud & | Translate (const CCVector3 &T) |
| virtual ccPointCloud & | Scale (const double s, const Eigen::Vector3d ¢er) override |
Apply scaling to the geometry coordinates. Given a scaling factor  , and center , and center  , a given point , a given point  is transformed according to is transformed according to  . More... . More... | |
| virtual ccPointCloud & | Rotate (const Eigen::Matrix3d &R, const Eigen::Vector3d ¢er) override |
Apply rotation to the geometry coordinates and normals. Given a rotation matrix  , and center , a given point is transformed according to , and center , a given point is transformed according to  . More... . More... | |
| bool | HasCovariances () const |
| Returns 'true' if the point cloud contains per-point covariance matrix. More... | |
| ccPointCloud & | NormalizeNormals () |
| Normalize point normals to length 1.`. More... | |
| std::shared_ptr< ccPointCloud > | SelectByIndex (const std::vector< size_t > &indices, bool invert=false) const |
Function to select points from input ccPointCloud into output ccPointCloud. More... | |
| ccPointCloud & | RemoveNonFinitePoints (bool remove_nan=true, bool remove_infinite=true) |
| Remove all points fromt he point cloud that have a nan entry, or infinite entries. More... | |
| std::shared_ptr< ccPointCloud > | VoxelDownSample (double voxel_size) |
| Function to downsample input ccPointCloud into output ccPointCloud with a voxel. More... | |
| std::tuple< std::shared_ptr< ccPointCloud >, Eigen::MatrixXi, std::vector< std::vector< int > > > | VoxelDownSampleAndTrace (double voxel_size, const Eigen::Vector3d &min_bound, const Eigen::Vector3d &max_bound, bool approximate_class=false) const |
| Function to downsample using geometry.ccPointCloud.VoxelDownSample. More... | |
| std::shared_ptr< ccPointCloud > | UniformDownSample (size_t every_k_points) const |
| Function to downsample input ccPointCloud into output ccPointCloud uniformly. More... | |
| std::shared_ptr< ccPointCloud > | RandomDownSample (double sampling_ratio) const |
| Function to downsample input pointcloud into output pointcloud randomly. More... | |
| std::shared_ptr< ccPointCloud > | FarthestPointDownSample (const size_t num_samples, const size_t start_index=0) const |
| Function to downsample input pointcloud into output pointcloud with a set of points has farthest distance. More... | |
| std::shared_ptr< ccPointCloud > | Crop (const ccBBox &bbox) const |
| Function to crop ccPointCloud into output ccPointCloud. More... | |
| std::shared_ptr< ccPointCloud > | Crop (const ecvOrientedBBox &bbox) const |
| Function to crop ccPointCloud into output ccPointCloud. More... | |
| std::tuple< std::shared_ptr< ccPointCloud >, std::vector< size_t > > | RemoveRadiusOutliers (size_t nb_points, double search_radius) const |
Function to remove points that have less than nb_points in a sphere of a given radius. More... | |
| std::tuple< std::shared_ptr< ccPointCloud >, std::vector< size_t > > | RemoveStatisticalOutliers (size_t nb_neighbors, double std_ratio) const |
Function to remove points that are further away from their nb_neighbor neighbors in average. More... | |
| bool | EstimateNormals (const cloudViewer::geometry::KDTreeSearchParam &search_param=cloudViewer::geometry::KDTreeSearchParamKNN(), bool fast_normal_computation=true) |
| Function to compute the normals of a point cloud. More... | |
| bool | OrientNormalsToAlignWithDirection (const Eigen::Vector3d &orientation_reference=Eigen::Vector3d(0.0, 0.0, 1.0)) |
| Function to orient the normals of a point cloud. More... | |
| bool | OrientNormalsTowardsCameraLocation (const Eigen::Vector3d &camera_location=Eigen::Vector3d::Zero()) |
| Function to orient the normals of a point cloud. More... | |
| void | OrientNormalsConsistentTangentPlane (size_t k) |
| Function to consistently orient estimated normals based on consistent tangent planes as described in Hoppe et al., "Surface
Reconstruction from Unorganized Points", 1992. More... | |
| std::vector< double > | ComputePointCloudDistance (const ccPointCloud &target) |
| Function to compute the point to point distances between point clouds. More... | |
| void | EstimateCovariances (const cloudViewer::geometry::KDTreeSearchParam &search_param=cloudViewer::geometry::KDTreeSearchParamKNN()) |
| Function to compute the covariance matrix for each point of a point cloud. More... | |
| std::vector< double > | ComputeMahalanobisDistance () const |
| Function to compute the Mahalanobis distance for points in an input point cloud. More... | |
| std::vector< double > | ComputeNearestNeighborDistance () const |
| double | ComputeResolution () const |
| std::tuple< std::shared_ptr< ccMesh >, std::vector< size_t > > | ComputeConvexHull () const |
| Function that computes the convex hull of the point cloud using qhull. More... | |
| std::tuple< std::shared_ptr< ccMesh >, std::vector< size_t > > | HiddenPointRemoval (const Eigen::Vector3d &camera_location, const double radius) const |
| This is an implementation of the Hidden Point Removal operator described in Katz et. al. 'Direct Visibility of Point Sets', 2007. More... | |
| std::vector< int > | ClusterDBSCAN (double eps, size_t min_points, bool print_progress=false) const |
| Cluster ccPointCloud using the DBSCAN algorithm Ester et al., "A Density-Based Algorithm for Discovering Clusters
in Large Spatial Databases with Noise", 1996. More... | |
| std::tuple< Eigen::Vector4d, std::vector< size_t > > | SegmentPlane (const double distance_threshold=0.01, const int ransac_n=3, const int num_iterations=100) const |
| Segment ccPointCloud plane using the RANSAC algorithm. More... | |
| std::shared_ptr< ccPointCloud > | CreateFromVoxelGrid (const cloudViewer::geometry::VoxelGrid &voxel_grid) |
| Function to create a PointCloud from a VoxelGrid. More... | |
| ccPointCloud & | PaintUniformColor (const Eigen::Vector3d &color) |
| Assigns each vertex in the ccMesh the same color. More... | |
| bool | initLOD () |
| Intializes the LOD structure. More... | |
| void | clearLOD () |
| Clears the LOD structure. More... | |
| Public Member Functions inherited from cloudViewer::PointCloudTpl< ccGenericPointCloud > | |
| PointCloudTpl () | |
| Default constructor. More... | |
| virtual | ~PointCloudTpl () |
| Default destructor. More... | |
| unsigned | size () const override |
| void | forEach (GenericCloud::genericPointAction action) override |
| void | getBoundingBox (CCVector3 &bbMin, CCVector3 &bbMax) override |
| void | placeIteratorAtBeginning () override |
| const CCVector3 * | getNextPoint () override |
| bool | enableScalarField () override |
| bool | isScalarFieldEnabled () const override |
| void | setPointScalarValue (unsigned pointIndex, ScalarType value) override |
| ScalarType | getPointScalarValue (unsigned pointIndex) const override |
| const CCVector3 * | getPoint (unsigned index) const override |
| void | getPoint (unsigned index, CCVector3 &P) const override |
| void | getPoint (unsigned index, double P[3]) const override |
| CCVector3 * | getPointPtr (size_t index) |
| std::vector< CCVector3 > & | getPoints () |
| const std::vector< CCVector3 > & | getPoints () const |
| const CCVector3 * | getPointPersistentPtr (unsigned index) override |
| const CCVector3 * | getPointPersistentPtr (unsigned index) const |
| void | reset () |
| Clears the cloud database. More... | |
| void | addPoint (const CCVector3 &P) |
| Adds a 3D point to the database. More... | |
| void | addPoint (double x, double y, double z) |
| void | addPoint (double xyz[3]) |
| void | setPoint (size_t index, const CCVector3 &P) |
| void | setEigenPoint (size_t index, const Eigen::Vector3d &point) |
| void | addEigenPoint (const Eigen::Vector3d &point) |
| void | addPoints (const std::vector< CCVector3 > &points) |
| void | addPoints (const std::vector< Eigen::Vector3d > &points) |
| Eigen::Vector3d | getEigenPoint (size_t index) const |
| std::vector< Eigen::Vector3d > | getEigenPoints () const |
| void | setEigenPoints (const std::vector< Eigen::Vector3d > &points) |
| unsigned | getNumberOfScalarFields () const |
| Returns the number of associated (and active) scalar fields. More... | |
| ScalarField * | getScalarField (int index) const |
| Returns a pointer to a specific scalar field. More... | |
| const char * | getScalarFieldName (int index) const |
| Returns the name of a specific scalar field. More... | |
| int | getScalarFieldIndexByName (const char *name) const |
| Returns the index of a scalar field represented by its name. More... | |
| ScalarField * | getCurrentInScalarField () const |
| Returns the scalar field currently associated to the cloud input. More... | |
| ScalarField * | getCurrentOutScalarField () const |
| Returns the scalar field currently associated to the cloud output. More... | |
| void | setCurrentInScalarField (int index) |
| Sets the INPUT scalar field. More... | |
| int | getCurrentInScalarFieldIndex () |
| Returns current INPUT scalar field index (or -1 if none) More... | |
| void | setCurrentOutScalarField (int index) |
| Sets the OUTPUT scalar field. More... | |
| int | getCurrentOutScalarFieldIndex () |
| Returns current OUTPUT scalar field index (or -1 if none) More... | |
| void | setCurrentScalarField (int index) |
| Sets both the INPUT & OUTPUT scalar field. More... | |
| bool | renameScalarField (int index, const char *newName) |
| Renames a specific scalar field. More... | |
| unsigned | capacity () const |
| Returns cloud capacity (i.e. reserved size) More... | |
| Public Member Functions inherited from ccGenericPointCloud | |
| ccGenericPointCloud (QString name=QString()) | |
| Default constructor. More... | |
| ccGenericPointCloud (const ccGenericPointCloud &cloud) | |
| Copy constructor. More... | |
| ~ccGenericPointCloud () override | |
| Default destructor. More... | |
| virtual ccOctree::Shared | computeOctree (cloudViewer::GenericProgressCallback *progressCb=nullptr, bool autoAddChild=true) |
| Computes the cloud octree. More... | |
| virtual ccOctree::Shared | getOctree () const |
| Returns the associated octree (if any) More... | |
| virtual void | setOctree (ccOctree::Shared octree, bool autoAddChild=true) |
| Sets the associated octree. More... | |
| virtual ccOctreeProxy * | getOctreeProxy () const |
| Returns the associated octree proxy (if any) More... | |
| virtual void | deleteOctree () |
| Erases the octree. More... | |
| virtual VisibilityTableType & | getTheVisibilityArray () |
| Returns associated visibility array. More... | |
| virtual const VisibilityTableType & | getTheVisibilityArray () const |
| Returns associated visibility array (const version) More... | |
| virtual cloudViewer::ReferenceCloud * | getTheVisiblePoints (const VisibilityTableType *visTable=nullptr, bool silent=false, cloudViewer::ReferenceCloud *selection=nullptr) const |
| Returns a ReferenceCloud equivalent to the visibility array. More... | |
| virtual bool | isVisibilityTableInstantiated () const |
| Returns whether the visibility array is allocated or not. More... | |
| virtual bool | resetVisibilityArray () |
| Resets the associated visibility array. More... | |
| virtual void | invertVisibilityArray () |
| Inverts the visibility array. More... | |
| virtual void | unallocateVisibilityArray () |
| Erases the points visibility information. More... | |
| ccBBox | getOwnBB (bool withGLFeatures=false) override |
| Returns the entity's own bounding-box. More... | |
| bool | isSerializable () const override |
| Returns whether object is serializable of not. More... | |
| void | setPointSize (unsigned size=0) |
| Sets point size. More... | |
| unsigned char | getPointSize () const |
| Returns current point size. More... | |
| void | importParametersFrom (const ccGenericPointCloud *cloud) |
| Imports the parameters from another cloud. More... | |
| bool | pointPicking (const CCVector2d &clickPos, const ccGLCameraParameters &camera, int &nearestPointIndex, double &nearestSquareDist, double pickWidth=2.0, double pickHeight=2.0, bool autoComputeOctree=false) |
| Point picking (brute force or octree-driven) More... | |
| std::tuple< Eigen::Vector3d, Eigen::Matrix3d > | computeMeanAndCovariance () const |
| cloudViewer::SquareMatrixd | computeCovariance () const |
| Public Member Functions inherited from ccShiftedObject | |
| ccShiftedObject (QString name=QString()) | |
| Default constructor. More... | |
| ccShiftedObject (const ccShiftedObject &s) | |
| Copy constructor. More... | |
| void | copyGlobalShiftAndScale (const ccShiftedObject &s) |
| Copies the Global Shift and Scale from another entity. More... | |
| virtual void | setGlobalShift (double x, double y, double z) |
| Sets shift applied to original coordinates (information storage only) More... | |
| virtual void | setGlobalShift (const CCVector3d &shift) |
| Sets shift applied to original coordinates (information storage only) More... | |
| virtual const CCVector3d & | getGlobalShift () const |
| Returns the shift applied to original coordinates. More... | |
| virtual void | setGlobalScale (double scale) |
| virtual double | getGlobalScale () const |
| Returns the scale applied to original coordinates. More... | |
| bool | isShifted () const |
| Returns whether the cloud is shifted or not. More... | |
| template<typename T > | |
| CCVector3d | toGlobal3d (const Vector3Tpl< T > &Plocal) const |
| Returns the point back-projected into the original coordinates system. More... | |
| template<typename T > | |
| CCVector3d | toLocal3d (const Vector3Tpl< T > &Pglobal) const |
| Returns the point projected into the local (shifted) coordinates system. More... | |
| template<typename T > | |
| CCVector3 | toLocal3pc (const Vector3Tpl< T > &Pglobal) const |
| Returns the point projected into the local (shifted) coordinates system. More... | |
| bool | getOwnGlobalBB (CCVector3d &minCorner, CCVector3d &maxCorner) override |
| GlobalBoundingBox | getOwnGlobalBB (bool withGLFeatures=false) override |
| Public Member Functions inherited from ccHObject | |
| ccHObject (QString name=QString()) | |
| Default constructor. More... | |
| ccHObject (const ccHObject &object) | |
| Copy constructor. More... | |
| virtual | ~ccHObject () override |
| Default destructor. More... | |
| virtual Eigen::Vector2d | GetMin2DBound () const |
| virtual Eigen::Vector2d | GetMax2DBound () const |
| virtual ccHObject & | Scale (const double s) |
| virtual ccHObject & | Rotate (const Eigen::Matrix3d &R) |
| QString | getViewId () const |
| bool | isGroup () const |
| Returns whether the instance is a group. More... | |
| ccHObject * | getParent () const |
| Returns parent object. More... | |
| virtual QIcon | getIcon () const |
| Returns the icon associated to this entity. More... | |
| void | addDependency (ccHObject *otherObject, int flags, bool additive=true) |
| Adds a new dependence (additive or not) More... | |
| int | getDependencyFlagsWith (const ccHObject *otherObject) |
| Returns the dependency flags with a given object. More... | |
| void | removeDependencyWith (ccHObject *otherObject) |
| Removes any dependency flags with a given object. More... | |
| void | removeDependencyFlag (ccHObject *otherObject, DEPENDENCY_FLAGS flag) |
| Removes a given dependency flag. More... | |
| virtual bool | addChild (ccHObject *child, int dependencyFlags=DP_PARENT_OF_OTHER, int insertIndex=-1) |
| Adds a child. More... | |
| unsigned | getChildrenNumber () const |
| Returns the number of children. More... | |
| unsigned int | getChildCountRecursive () const |
| Returns the total number of children under this object recursively. More... | |
| ccHObject * | getChild (unsigned childPos) const |
| Returns the ith child. More... | |
| ccHObject * | find (unsigned uniqueID) |
| Finds an entity in this object hierarchy. More... | |
| unsigned | filterChildren (Container &filteredChildren, bool recursive=false, CV_CLASS_ENUM filter=CV_TYPES::OBJECT, bool strict=false) const |
| Collects the children corresponding to a certain pattern. More... | |
| void | detachChild (ccHObject *child) |
| Detaches a specific child. More... | |
| void | detachAllChildren () |
| Removes a specific child. More... | |
| void | getTypeID_recursive (std::vector< removeInfo > &rmInfos, bool relative) |
| void | getTypeID_recursive (std::vector< hideInfo > &hdInfos, bool relative) |
| void | removeChild (ccHObject *child) |
| void | removeChild (int pos) |
| Removes a specific child given its index. More... | |
| void | removeAllChildren () |
| Removes all children. More... | |
| int | getChildIndex (const ccHObject *aChild) const |
| Returns child index. More... | |
| void | swapChildren (unsigned firstChildIndex, unsigned secondChildIndex) |
| Swaps two children. More... | |
| int | getIndex () const |
| Returns index relatively to its parent or -1 if no parent. More... | |
| void | transferChild (ccHObject *child, ccHObject &newParent) |
| Transfer a given child to another parent. More... | |
| void | transferChildren (ccHObject &newParent, bool forceFatherDependent=false) |
| Transfer all children to another parent. More... | |
| ccHObject * | getFirstChild () const |
| Shortcut: returns first child. More... | |
| ccHObject * | getLastChild () const |
| Shortcut: returns last child. More... | |
| bool | isAncestorOf (const ccHObject *anObject) const |
| Returns true if the current object is an ancestor of the specified one. More... | |
| void | removeFromRenderScreen (bool recursive=true) |
| void | hideObject_recursive (bool recursive) |
| void | hideBB (CC_DRAW_CONTEXT context) |
| void | showBB (CC_DRAW_CONTEXT context) |
| void | setRedrawFlagRecursive (bool redraw=false) |
| void | setForceRedrawRecursive (bool redraw=false) |
| void | setPointSizeRecursive (int pSize) |
| void | setLineWidthRecursive (PointCoordinateType width) |
| virtual ccBBox | getBB_recursive (bool withGLFeatures=false, bool onlyEnabledChildren=true) |
| Returns the bounding-box of this entity and it's children. More... | |
| virtual GlobalBoundingBox | getGlobalBB_recursive (bool withGLFeatures=false, bool onlyEnabledChildren=true) |
| Returns the global bounding-box of this entity and it's children. More... | |
| virtual ccBBox | getDisplayBB_recursive (bool relative) |
| Returns the bounding-box of this entity and it's children WHEN DISPLAYED. More... | |
| virtual ccBBox | getOwnFitBB (ccGLMatrix &trans) |
| Returns best-fit bounding-box (if available) More... | |
| virtual void | drawBB (CC_DRAW_CONTEXT &context, const ecvColor::Rgb &col) |
| Draws the entity (and its children) bounding-box. More... | |
| void | draw (CC_DRAW_CONTEXT &context) override |
| Draws entity and its children. More... | |
| void | updateNameIn3DRecursive () |
| void | setHideShowType (CC_DRAW_CONTEXT &context) |
| void | setRemoveType (CC_DRAW_CONTEXT &context) |
| ENTITY_TYPE | getEntityType () const |
| virtual void | redrawDisplay (bool forceRedraw=true, bool only2D=false) |
| Redraws associated display. More... | |
| bool | getAbsoluteGLTransformation (ccGLMatrix &trans) const |
| virtual bool | isDisplayed () const |
| Returns whether the object is actually displayed (visible) or not. More... | |
| virtual bool | isBranchEnabled () const |
| Returns whether the object and all its ancestors are enabled. More... | |
| virtual void | redrawDisplay_recursive (bool p) |
| virtual void | refreshDisplay_recursive (bool p) |
| virtual void | setSelected_recursive (bool p) |
| virtual void | toggleActivation_recursive () |
| virtual void | toggleVisibility_recursive () |
| virtual void | toggleColors_recursive () |
| virtual void | resetGLTransformationHistory_recursive () |
| virtual void | toggleNormals_recursive () |
| virtual void | toggleSF_recursive () |
| virtual void | toggleShowName_recursive () |
| unsigned | findMaxUniqueID_recursive () const |
| Returns the max 'unique ID' of this entity and its siblings. More... | |
| void | applyGLTransformation_recursive (const ccGLMatrix *trans=nullptr) |
| Applies the active OpenGL transformation to the entity (recursive) More... | |
| bool | isSerializable () const override |
| Returns whether object is serializable of not. More... | |
| bool | toFile (QFile &out, short dataVersion) const override |
| Saves data to binary stream. More... | |
| bool | fromFile (QFile &in, short dataVersion, int flags, LoadedIDMap &oldToNewIDMap) override |
| Loads data from binary stream. More... | |
| short | minimumFileVersion () const override |
| Returns the minimum file version required to save this instance. More... | |
| bool | fromFileNoChildren (QFile &in, short dataVersion, int flags, LoadedIDMap &oldToNewIDMap) |
| Custom version of ccSerializableObject::fromFile. More... | |
| virtual bool | isShareable () const |
| Returns whether object is shareable or not. More... | |
| virtual void | setSelectionBehavior (SelectionBehavior mode) |
| Sets selection behavior (when displayed) More... | |
| virtual SelectionBehavior | getSelectionBehavior () const |
| Returns selection behavior. More... | |
| virtual const ccGLMatrix & | getGLTransformationHistory () const |
| Returns the transformation 'history' matrix. More... | |
| virtual void | setGLTransformationHistory (const ccGLMatrix &mat) |
| Sets the transformation 'history' matrix (handle with care!) More... | |
| virtual void | resetGLTransformationHistory () |
| Resets the transformation 'history' matrix. More... | |
| bool | pushDisplayState () override |
| Pushes the current display state (overridden) More... | |
| void | popDisplayState (bool apply=true) override |
| Pops the last pushed display state (overridden) More... | |
| Public Member Functions inherited from ccObject | |
| ccObject (QString name=QString()) | |
| Default constructor. More... | |
| ccObject (const ccObject &object) | |
| Copy constructor. More... | |
| virtual QString | getName () const |
| Returns object name. More... | |
| virtual void | setName (const QString &name) |
| Sets object name. More... | |
| virtual void | setRemoveFlag (bool removeFlag) |
| Sets removeFlag. More... | |
| virtual bool | getRemoveFlag () |
| Returns removeFlag. More... | |
| virtual unsigned | getUniqueID () const |
| Returns object unique ID. More... | |
| virtual void | setUniqueID (unsigned ID) |
| Changes unique ID. More... | |
| virtual bool | isEnabled () const |
| Returns whether the object is enabled or not. More... | |
| virtual void | setEnabled (bool state) |
| Sets the "enabled" property. More... | |
| virtual void | toggleActivation () |
| Toggles the "enabled" property. More... | |
| virtual bool | isLocked () const |
| Returns whether the object is locked or not. More... | |
| virtual void | setLocked (bool state) |
| Sets the "enabled" property. More... | |
| bool | isLeaf () const |
| bool | isCustom () const |
| bool | isHierarchy () const |
| bool | isKindOf (CV_CLASS_ENUM type) const |
| bool | isA (CV_CLASS_ENUM type) const |
| QVariant | getMetaData (const QString &key) const |
| Returns a given associated meta data. More... | |
| bool | removeMetaData (const QString &key) |
| Removes a given associated meta-data. More... | |
| void | setMetaData (const QString &key, const QVariant &data) |
| Sets a meta-data element. More... | |
| void | setMetaData (const QVariantMap &dataset, bool overwrite=false) |
| Sets several meta-data elements at a time. More... | |
| bool | hasMetaData (const QString &key) const |
| Returns whether a meta-data element with the given key exists or not. More... | |
| const QVariantMap & | metaData () const |
| Returns meta-data map (const only) More... | |
| void | setBaseName (const QString &baseName) |
| QString | getBaseName () const |
| void | setFullPath (const QString &fullPaht) |
| QString | getFullPath () const |
| Public Member Functions inherited from ccSerializableObject | |
| virtual | ~ccSerializableObject ()=default |
| Destructor. More... | |
| Public Member Functions inherited from ccDrawableObject | |
| ccDrawableObject () | |
| Default constructor. More... | |
| ccDrawableObject (const ccDrawableObject &object) | |
| Copy constructor. More... | |
| virtual | ~ccDrawableObject ()=default |
| virtual bool | isVisible () const |
| Returns whether entity is visible or not. More... | |
| virtual void | setVisible (bool state) |
| Sets entity visibility. More... | |
| virtual void | toggleVisibility () |
| Toggles visibility. More... | |
| virtual bool | isRedraw () const |
| Returns whether entity is to be redraw. More... | |
| virtual void | setRedraw (bool state) |
| Sets entity redraw mode. More... | |
| virtual void | setForceRedraw (bool state) |
| Sets force redraw. More... | |
| virtual void | setFixedId (bool state) |
| virtual bool | isFixedId () |
| virtual bool | isVisibilityLocked () const |
| Returns whether visibility is locked or not. More... | |
| virtual void | lockVisibility (bool state) |
| Locks/unlocks visibility. More... | |
| virtual bool | isSelected () const |
| Returns whether entity is selected or not. More... | |
| virtual void | setSelected (bool state) |
| Selects/Unselects entity. More... | |
| virtual bool | colorsShown () const |
| Returns whether colors are shown or not. More... | |
| virtual void | showColors (bool state) |
| Sets colors visibility. More... | |
| virtual void | toggleColors () |
| Toggles colors display state. More... | |
| virtual bool | normalsShown () const |
| Returns whether normals are shown or not. More... | |
| virtual void | showNormals (bool state) |
| Sets normals visibility. More... | |
| virtual void | toggleNormals () |
| Toggles normals display state. More... | |
| virtual void | showSF (bool state) |
| Sets active scalarfield visibility. More... | |
| virtual void | toggleSF () |
| Toggles SF display state. More... | |
| virtual bool | sfShown () const |
| Returns whether active scalar field is visible. More... | |
| virtual void | toggleMaterials () |
| Toggles material display state. More... | |
| virtual void | showNameIn3D (bool state) |
| Sets whether name should be displayed in 3D. More... | |
| virtual bool | nameShownIn3D () const |
| Returns whether name is displayed in 3D or not. More... | |
| virtual void | toggleShowName () |
| Toggles name in 3D display state. More... | |
| virtual bool | isColorOverridden () const |
| virtual const ecvColor::Rgb & | getTempColor () const |
| Returns current temporary (unique) color. More... | |
| virtual void | setTempColor (const ecvColor::Rgb &col, bool autoActivate=true) |
| Sets current temporary (unique) More... | |
| virtual void | enableTempColor (bool state) |
| Set temporary color activation state. More... | |
| virtual float | getOpacity () const |
| virtual void | setOpacity (float opacity) |
| Set opacity activation state. More... | |
| virtual void | setGLTransformation (const ccGLMatrix &trans) |
| Associates entity with a GL transformation (rotation + translation) More... | |
| virtual void | enableGLTransformation (bool state) |
| Enables/disables associated GL transformation. More... | |
| virtual bool | isGLTransEnabled () const |
| Returns whether a GL transformation is enabled or not. More... | |
| virtual const ccGLMatrix & | getGLTransformation () const |
| Returns associated GL transformation. More... | |
| virtual void | resetGLTransformation () |
| Resets associated GL transformation. More... | |
| virtual void | rotateGL (const ccGLMatrix &rotMat) |
| Multiplies (left) current GL transformation by a rotation matrix. More... | |
| virtual void | translateGL (const CCVector3 &trans) |
| Translates current GL transformation by a rotation matrix. More... | |
| virtual void | removeAllClipPlanes () |
| Removes all clipping planes (if any) More... | |
| virtual bool | addClipPlanes (const ccClipPlane &plane) |
| Registers a new clipping plane. More... | |
| virtual void | toggleClipPlanes (CC_DRAW_CONTEXT &context, bool enable) |
| Enables or disables clipping planes (OpenGL) More... | |
| virtual void | applyDisplayState (const DisplayState &state) |
| Applies a display state. More... | |
| Public Member Functions inherited from cloudViewer::GenericIndexedCloudPersist | |
| ~GenericIndexedCloudPersist () override=default | |
| Default destructor. More... | |
| Public Member Functions inherited from cloudViewer::GenericIndexedCloud | |
| ~GenericIndexedCloud () override=default | |
| Default destructor. More... | |
| Public Member Functions inherited from cloudViewer::GenericCloud | |
| GenericCloud ()=default | |
| Default constructor. More... | |
| virtual | ~GenericCloud ()=default |
| Default destructor. More... | |
| virtual bool | hasPoints () const |
Static Public Member Functions | |
| static ccPointCloud * | From (const cloudViewer::GenericIndexedCloud *cloud, const ccGenericPointCloud *sourceCloud=nullptr) |
| Creates a new point cloud object from a GenericIndexedCloud. More... | |
| static ccPointCloud * | From (cloudViewer::GenericCloud *cloud, const ccGenericPointCloud *sourceCloud=nullptr) |
| Creates a new point cloud object from a GenericCloud. More... | |
| static ccPointCloud * | From (const ccPointCloud *sourceCloud, const std::vector< size_t > &indices, bool invert=false) |
Function to select points from input ccPointCloud into output ccPointCloud. More... | |
| static std::vector< Eigen::Matrix3d > | EstimatePerPointCovariances (const ccPointCloud &input, const cloudViewer::geometry::KDTreeSearchParam &search_param=cloudViewer::geometry::KDTreeSearchParamKNN()) |
| Static function to compute the covariance matrix for each point of a point cloud. Doesn't change the input PointCloud, just outputs the covariance matrices. More... | |
| static std::shared_ptr< ccPointCloud > | CreateFromDepthImage (const cloudViewer::geometry::Image &depth, const cloudViewer::camera::PinholeCameraIntrinsic &intrinsic, const Eigen::Matrix4d &extrinsic=Eigen::Matrix4d::Identity(), double depth_scale=1000.0, double depth_trunc=1000.0, int stride=1, bool project_valid_depth_only=true) |
| Factory function to create a pointcloud from a depth image and a camera model. More... | |
| static std::shared_ptr< ccPointCloud > | CreateFromRGBDImage (const cloudViewer::geometry::RGBDImage &image, const cloudViewer::camera::PinholeCameraIntrinsic &intrinsic, const Eigen::Matrix4d &extrinsic=Eigen::Matrix4d::Identity(), bool project_valid_depth_only=true) |
| Factory function to create a pointcloud from an RGB-D image and a camera model. More... | |
| Static Public Member Functions inherited from ccHObject | |
| static ccHObject * | New (CV_CLASS_ENUM objectType, const char *name=nullptr) |
| Static factory. More... | |
| static ccHObject * | New (const QString &pluginId, const QString &classId, const char *name=nullptr) |
| Static factory (version to be used by external plugin factories) More... | |
| static Eigen::Vector3d | ComputeMinBound (const std::vector< Eigen::Vector3d > &points) |
| Compute min bound of a list points. More... | |
| static Eigen::Vector3d | ComputeMaxBound (const std::vector< Eigen::Vector3d > &points) |
| Compute max bound of a list points. More... | |
| static Eigen::Vector3d | ComputeCenter (const std::vector< Eigen::Vector3d > &points) |
| Computer center of a list of points. More... | |
| static void | ResizeAndPaintUniformColor (std::vector< Eigen::Vector3d > &colors, std::size_t size, const Eigen::Vector3d &color) |
| Resizes the colors vector and paints a uniform color. More... | |
| static void | TransformPoints (const Eigen::Matrix4d &transformation, std::vector< Eigen::Vector3d > &points) |
| Transforms all points with the transformation matrix. More... | |
| static void | TransformNormals (const Eigen::Matrix4d &transformation, std::vector< Eigen::Vector3d > &normals) |
| Transforms the normals with the transformation matrix. More... | |
| static void | TransformCovariances (const Eigen::Matrix4d &transformation, std::vector< Eigen::Matrix3d > &covariances) |
| Transforms all covariance matrices with the transformation. More... | |
| static void | TranslatePoints (const Eigen::Vector3d &translation, std::vector< Eigen::Vector3d > &points, bool relative) |
| Apply translation to the geometry coordinates. More... | |
| static void | ScalePoints (const double scale, std::vector< Eigen::Vector3d > &points, const Eigen::Vector3d ¢er) |
Scale the coordinates of all points by the scaling factor scale. More... | |
| static void | RotatePoints (const Eigen::Matrix3d &R, std::vector< Eigen::Vector3d > &points, const Eigen::Vector3d ¢er) |
Rotate all points with the rotation matrix R. More... | |
| static void | RotateNormals (const Eigen::Matrix3d &R, std::vector< Eigen::Vector3d > &normals) |
Rotate all normals with the rotation matrix R. More... | |
| static void | RotateCovariances (const Eigen::Matrix3d &R, std::vector< Eigen::Matrix3d > &covariances) |
Rotate all covariance matrices with the rotation matrix R. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromXYZ (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from XYZ RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromYZX (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from YZX RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromZXY (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from ZXY RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromXZY (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from XZY RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromZYX (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from ZYX RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromYXZ (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from YXZ RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromAxisAngle (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from AxisAngle RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromQuaternion (const Eigen::Vector4d &rotation) |
| Get Rotation Matrix from Quaternion. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromEulerAngle (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from Euler angle. More... | |
| Static Public Member Functions inherited from ccObject | |
| static unsigned | GetCurrentDBVersion () |
| Returns current database version. More... | |
| static void | SetUniqueIDGenerator (ccUniqueIDGenerator::Shared generator) |
| Sets the unique ID generator. More... | |
| static ccUniqueIDGenerator::Shared | GetUniqueIDGenerator () |
| Returns the unique ID generator. More... | |
| static unsigned | GetNextUniqueID () |
| Returns a new unassigned unique ID. More... | |
| static unsigned | GetLastUniqueID () |
| Returns last assigned unique ID. More... | |
| static CV_CLASS_ENUM | ReadClassIDFromFile (QFile &in, short dataVersion) |
| Helper: reads out class ID from a binary stream. More... | |
| Static Public Member Functions inherited from ccSerializableObject | |
| static bool | WriteError () |
| Sends a custom error message (write error) and returns 'false'. More... | |
| static bool | ReadError () |
| Sends a custom error message (read error) and returns 'false'. More... | |
| static bool | MemoryError () |
| Sends a custom error message (not enough memory) and returns 'false'. More... | |
| static bool | CorruptError () |
| Sends a custom error message (corrupted file) and returns 'false'. More... | |
Public Attributes | |
| std::vector< Eigen::Matrix3d > | covariances_ |
| Covariance Matrix for each point. More... | |
Protected Member Functions | |
| void | drawMeOnly (CC_DRAW_CONTEXT &context) override |
| Draws the entity only (not its children) More... | |
| void | applyGLTransformation (const ccGLMatrix &trans) override |
| Applies a GL transformation to the entity. More... | |
| bool | toFile_MeOnly (QFile &out, short dataVersion) const override |
| Save own object data. More... | |
| short | minimumFileVersion_MeOnly () const override |
| bool | fromFile_MeOnly (QFile &in, short dataVersion, int flags, LoadedIDMap &oldToNewIDMap) override |
| Loads own object data. More... | |
| void | notifyGeometryUpdate () override |
| void | swapPoints (unsigned firstIndex, unsigned secondIndex) override |
| virtual void | removePoints (size_t index) override |
| void | releaseVBOs () |
| Release VBOs. More... | |
| Protected Member Functions inherited from cloudViewer::PointCloudTpl< ccGenericPointCloud > | |
| CCVector3 * | point (unsigned index) |
| Returns non const access to a given point. More... | |
| const CCVector3 * | point (unsigned index) const |
| Returns const access to a given point. More... | |
| Protected Member Functions inherited from ccShiftedObject | |
| bool | saveShiftInfoToFile (QFile &out) const |
| Serialization helper (output) More... | |
| bool | loadShiftInfoFromFile (QFile &in) |
| Serialization helper (input) More... | |
| Protected Member Functions inherited from ccHObject | |
| virtual void | setParent (ccHObject *anObject) |
| Sets parent object. More... | |
| virtual void | drawNameIn3D () |
| Draws the entity name in 3D. More... | |
| virtual void | onDeletionOf (const ccHObject *obj) |
| This method is called when another object is deleted. More... | |
| virtual void | onUpdateOf (ccHObject *obj) |
| This method is called when another object (geometry) is updated. More... | |
| Protected Member Functions inherited from ccObject | |
| virtual bool | getFlagState (CV_OBJECT_FLAG flag) const |
| Returns flag state. More... | |
| virtual void | setFlagState (CV_OBJECT_FLAG flag, bool state) |
| Sets flag state. More... | |
| bool | toFile (QFile &out, short dataVersion) const override |
| Saves data to binary stream. More... | |
| short | minimumFileVersion () const override |
| Returns the minimum file version required to save this instance. More... | |
| bool | fromFile (QFile &in, short dataVersion, int flags, LoadedIDMap &oldToNewIDMap) override |
| Reimplemented from ccSerializableObject::fromFile. More... | |
Protected Attributes | |
| ColorsTableType * | m_rgbColors |
| Colors. More... | |
| NormsIndexesTableType * | m_normals |
| Normals (compressed) More... | |
| bool | m_sfColorScaleDisplayed |
| ccScalarField * | m_currentDisplayedScalarField |
| Currently displayed scalar field. More... | |
| int | m_currentDisplayedScalarFieldIndex |
| Currently displayed scalar field index. More... | |
| std::vector< Grid::Shared > | m_grids |
| Associated grid structure. More... | |
| bool | m_visibilityCheckEnabled |
| Whether visibility check is available or not (during comparison) More... | |
| vboSet | m_vboManager |
| Set of VBOs attached to this cloud. More... | |
| ccPointCloudLOD * | m_lod |
| L.O.D. structure. More... | |
| FWFDescriptorSet | m_fwfDescriptors |
| General waveform descriptors. More... | |
| std::vector< ccWaveform > | m_fwfWaveforms |
| Per-point waveform accessors. More... | |
| SharedFWFDataContainer | m_fwfData |
| Waveforms raw data storage. More... | |
| Protected Attributes inherited from cloudViewer::PointCloudTpl< ccGenericPointCloud > | |
| std::vector< CCVector3 > | m_points |
| 3D Points database More... | |
| BoundingBox | m_bbox |
| Bounding-box. More... | |
| unsigned | m_currentPointIndex |
| 'Iterator' on the points db More... | |
| std::vector< ScalarField * > | m_scalarFields |
| Associated scalar fields. More... | |
| int | m_currentInScalarFieldIndex |
| Index of current scalar field used for input. More... | |
| int | m_currentOutScalarFieldIndex |
| Index of current scalar field used for output. More... | |
| Protected Attributes inherited from ccGenericPointCloud | |
| VisibilityTableType | m_pointsVisibility |
| Per-point visibility table. More... | |
| unsigned char | m_pointSize |
| Point size (won't be applied if 0) More... | |
| Protected Attributes inherited from ccShiftedObject | |
| CCVector3d | m_globalShift |
| Global shift (typically applied at loading time) More... | |
| double | m_globalScale |
| Global scale (typically applied at loading time) More... | |
| Protected Attributes inherited from ccHObject | |
| ccHObject * | m_parent |
| Parent. More... | |
| Container | m_children |
| Children. More... | |
| SelectionBehavior | m_selectionBehavior |
| Selection behavior. More... | |
| std::map< ccHObject *, int > | m_dependencies |
| Dependencies map. More... | |
| ccGLMatrix | m_glTransHistory |
| Cumulative GL transformation. More... | |
| bool | m_isDeleting |
| Flag to safely handle dependencies when the object is being deleted. More... | |
| Protected Attributes inherited from ccObject | |
| QString | m_name |
| Object name. More... | |
| QString | m_baseName |
| QString | m_filePath |
| bool | m_removeFlag |
| unsigned | m_flags |
| Object flags. More... | |
| QVariantMap | m_metaData |
| Associated meta-data. More... | |
| Protected Attributes inherited from ccDrawableObject | |
| bool | m_fixedId |
| bool | m_modelRedraw |
| bool | m_forceRedraw |
| float | m_opacity |
| bool | m_visible |
| Specifies whether the object is visible or not. More... | |
| bool | m_selected |
| Specifies whether the object is selected or not. More... | |
| bool | m_lockedVisibility |
| Specifies whether the visibility can be changed by user or not. More... | |
| bool | m_colorsDisplayed |
| Specifies whether colors should be displayed. More... | |
| bool | m_normalsDisplayed |
| Specifies whether normals should be displayed. More... | |
| bool | m_sfDisplayed |
| Specifies whether scalar field should be displayed. More... | |
| ecvColor::Rgb | m_tempColor |
| Temporary (unique) color. More... | |
| bool | m_colorIsOverridden |
| Temporary (unique) color activation state. More... | |
| ccGLMatrix | m_glTrans |
| Current GL transformation. More... | |
| bool | m_glTransEnabled |
| Current GL transformation activation state. More... | |
| bool | m_showNameIn3D |
| Whether name is displayed in 3D or not. More... | |
| CCVector3d | m_nameIn3DPos |
| Last 2D position of the '3D' name. More... | |
| ccClipPlaneSet | m_clipPlanes |
| Active clipping planes (used for display only) More... | |
| std::vector< DisplayState::Shared > | m_displayStateStack |
| The stack of pushed display states. More... | |
A 3D cloud and its associated features (color, normals, scalar fields, etc.)
A point cloud can have multiple features:
Definition at line 146 of file ecvPointCloud.h.
Base class (shortcut)
Definition at line 150 of file ecvPointCloud.h.
| using ccPointCloud::FWFDataContainer = std::vector<uint8_t> |
Waveform data container.
Definition at line 506 of file ecvPointCloud.h.
| using ccPointCloud::FWFDescriptorSet = QMap<uint8_t, WaveformDescriptor> |
Waveform descriptors set.
Definition at line 503 of file ecvPointCloud.h.
| using ccPointCloud::SharedFWFDataContainer = QSharedPointer<const FWFDataContainer> |
Definition at line 507 of file ecvPointCloud.h.
Warnings for the partialClone method (bit flags)
| Enumerator | |
|---|---|
| WRN_OUT_OF_MEM_FOR_COLORS | |
| WRN_OUT_OF_MEM_FOR_NORMALS | |
| WRN_OUT_OF_MEM_FOR_SFS | |
| WRN_OUT_OF_MEM_FOR_FWF | |
Definition at line 208 of file ecvPointCloud.h.
RGB filter types.
| Enumerator | |
|---|---|
| NONE | |
| BILATERAL | |
| GAUSSIAN | |
| MEAN | |
| MEDIAN | |
Definition at line 790 of file ecvPointCloud.h.
| Enumerator | |
|---|---|
| CYLINDER | |
| CONE | |
| STRAIGHTENED_CONE | |
| STRAIGHTENED_CONE2 | |
Definition at line 864 of file ecvPointCloud.h.
| ccPointCloud::ccPointCloud | ( | QString | name = QString() | ) | |
| throw | ( | ||||
| ) | |||||
Default constructor.
Creates an empty cloud without any feature. Each of them shoud be specifically instantiated/created (once the points have been added to this cloud, at least partially).
| name | cloud name (optional) |
| ccPointCloud::ccPointCloud | ( | const ccPointCloud & | cloud | ) |
| ccPointCloud::ccPointCloud | ( | const std::vector< Eigen::Vector3d > & | points, |
| const std::string & | name = "cloud" |
||
| ) |
|
override |
Default destructor.
| void ccPointCloud::addColorRampInfo | ( | CC_DRAW_CONTEXT & | context | ) |
Adds associated SF color ramp info to current GL context.
| void ccPointCloud::addEigenColor | ( | const Eigen::Vector3d & | color | ) |
Referenced by cloudViewer::pipelines::integration::ScalableTSDFVolume::ExtractTriangleMesh(), cloudViewer::pipelines::integration::UniformTSDFVolume::ExtractTriangleMesh(), cloudViewer::io::ReadModelUsingAssimp(), cloudViewer::io::ReadPointCloudFromXYZRGB(), and cloudViewer::io::ReadTriangleMeshFromOBJ().
| void ccPointCloud::addEigenColors | ( | const std::vector< Eigen::Vector3d > & | colors | ) |
| void ccPointCloud::addEigenNorm | ( | const Eigen::Vector3d & | N | ) |
| void ccPointCloud::addEigenNorms | ( | const std::vector< Eigen::Vector3d > & | normals | ) |
|
inline |
Pushes a grey color on stack (shortcut)
Shortcut: color is converted to RGB(g, g, g)
| g | grey component |
Definition at line 722 of file ecvPointCloud.h.
Referenced by SoiFilter::loadFile(), and cloudViewer::geometry::pybind_pointcloud().
|
inline |
Adds an associated grid.
Definition at line 449 of file ecvPointCloud.h.
| void ccPointCloud::addNorm | ( | const CCVector3 & | N | ) |
Pushes a normal vector on stack (shortcut)
| N | normal vector |
Referenced by MeshWrapper< Real >::addNormal(), define_ccPointCloud(), ccCompass::estimateStructureNormals(), FromFbxMesh(), LoadCloud(), RDBFilter::loadFile(), LoadScan(), and cloudViewer::visualization::MessageProcessor::ProcessMessage().
| void ccPointCloud::addNormAtIndex | ( | const PointCoordinateType * | N, |
| unsigned | index | ||
| ) |
Adds a normal vector to the one at a specific index.
The resulting sum is automatically normalized and compressed.
| N | normal vector to add (size: 3) |
| index | normal index to modify |
| void ccPointCloud::addNormIndex | ( | CompressedNormType | index | ) |
Pushes a compressed normal vector.
| index | compressed normal vector |
| void ccPointCloud::addNorms | ( | const std::vector< CCVector3 > & | Ns | ) |
| void ccPointCloud::addNorms | ( | const std::vector< CompressedNormType > & | idxes | ) |
|
inline |
Pushes an RGB color on stack (shortcut)
| r | red component |
| g | green component |
| b | blue component |
Definition at line 714 of file ecvPointCloud.h.
| void ccPointCloud::addRGBColor | ( | const ecvColor::Rgb & | C | ) |
Pushes an RGB color on stack.
| C | RGB color |
Referenced by MeshWrapper< Real >::addColor(), contourPoly(), contourPoly2(), FromFbxMesh(), getMortarMaps(), LasScalarFieldLoader::handleRGBValue(), LoadCloud(), CSVMatrixFilter::loadFile(), LASFWFFilter::loadFile(), LASFilter::loadFile(), RDBFilter::loadFile(), LoadScan(), cloudViewer::io::ReadTriangleMeshFromGLTF(), rotY(), and qCanupoTools::TrainClassifier().
| void ccPointCloud::addRGBColors | ( | const std::vector< ecvColor::Rgb > & | colors | ) |
| int ccPointCloud::addScalarField | ( | ccScalarField * | sf | ) |
Adds an existing scalar field to this cloud.
Warning: the cloud takes ownership of it!
| sf | existing scalar field |
|
overridevirtual |
Creates a new scalar field and registers it.
Warnings:
| uniqueName | scalar field name (must be unique) |
Reimplemented from cloudViewer::PointCloudTpl< ccGenericPointCloud >.
Referenced by LasCloudChunk::addLasFieldsToCloud(), ccScalarFieldArithmeticsDlg::Apply(), ccLibAlgorithms::ApplyCCLibAlgorithm(), ccTrace::buildCurvatureCost(), ccTrace::buildGradientCost(), masc::Classifier::classify(), qCanupoProcess::Classify(), qM3C2Process::Compute(), qVoxFallProcess::Compute(), ccComparisonDlg::computeApproxDistances(), ccComparisonDlg::computeDistances(), ccLibAlgorithms::ComputeGeomCharacteristic(), DistanceMapGenerationTool::ComputeRadialDist(), ccRasterizeTool::convertGridToCloud(), DistanceMapGenerationTool::ConvertMapToCloud(), ccEntityAction::convertNormalsTo(), ccCropTool::Crop(), qPCV::doAction(), qPoissonRecon::doAction(), ccCompass::estimateP21(), masc::Classifier::evaluate(), GrainsAsEllipsoids::exportResultsAsCloud(), qFacets::extractFacets(), TreeIso::Final_seg_pcd(), ccRasterizeTool::generateHillshade(), getMortarMaps(), ccRegistrationTools::ICP(), ccEntityAction::importToSF(), TreeIso::Init_seg_pcd(), TreeIso::Intermediate_seg_pcd(), LoadCloud(), LASFWFFilter::loadFile(), RDBFilter::loadFile(), LoadScan(), ccTrace::optimizePath(), masc::Feature::PrepareSF(), CommandExtractCCs::process(), CommandStatTest::process(), PCVCommand::Process(), cloudViewer::geometry::pybind_pointcloud(), ccEntityAction::rgbGaussianFilter(), ccEntityAction::sfAddIdField(), ccEntityAction::sfGaussianFilter(), and ccEntityAction::statisticalTest().
| const ccPointCloud& ccPointCloud::append | ( | ccPointCloud * | cloud, |
| unsigned | pointCountBefore, | ||
| bool | ignoreChildren = false |
||
| ) |
Appends a cloud to this one.
Same as the += operator with pointCountBefore == size()
| cloud | cloud to be added |
| pointCountBefore | the number of points previously contained in this cloud |
| ignoreChildren | whether to copy input cloud's children or not |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::applyFilterToRGB | ( | PointCoordinateType | sigma, |
| PointCoordinateType | sigmaSF, | ||
| RgbFilterOptions | filterParams, | ||
| cloudViewer::GenericProgressCallback * | progressCb = nullptr |
||
| ) |
Applies a spatial Gaussian filter on RGB colors.
The "amplitude" of the Gaussian filter must be specified (sigma). As 99% of the Gaussian distribution is between -3*sigma and +3*sigma around the mean value, this filter will only look for neighbors within a sphere of radius 3*sigma. One can also use the filter as a Bilateral filter. In this case the weights are computed considering the difference of the neighbors SF values with the current point SF value (also following a Gaussian distribution). Warning: this method assumes the output scalar field is set.
| sigma | filter variance |
| sigmaSF | if strictly positive, the variance for the Bilateral filter |
| filterParams | filter options |
| progressCb | the client application can get some notification of the process progress through this callback mechanism (see GenericProgressCallback) |
Referenced by ccEntityAction::rgbGaussianFilter().
|
overrideprotectedvirtual |
Applies a GL transformation to the entity.
this = rotMat*(this-rotCenter)+(rotCenter+trans)
| trans | a ccGLMatrix structure |
Reimplemented from ccHObject.
|
overridevirtual |
Applies a rigid transformation (rotation + translation)
Implements ccGenericPointCloud.
|
overridevirtual |
Clears the entity from all its points and features.
Display parameters are also reseted to their default values.
Reimplemented from ccGenericPointCloud.
Reimplemented in ccSymbolCloud.
Referenced by ccGraphicalSegmentationTool::addPointToPolyline(), ccSymbolCloud::clear(), ccGraphicalSegmentationTool::closePolyLine(), ccGraphicalSegmentationTool::closeRectangle(), ccTopologyRelation::constructGraphic(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), ccCompass::estimateP21(), ccContourExtractor::ExtractConcaveHull2D(), ccGraphicalSegmentationTool::pauseSegmentationMode(), cloudViewer::io::ReadPointCloudFromPLY(), cloudViewer::io::ReadPointCloudFromPTS(), cloudViewer::io::ReadPointCloudFromXYZ(), cloudViewer::io::ReadPointCloudFromXYZN(), cloudViewer::io::ReadPointCloudFromXYZRGB(), cloudViewer::io::ReadPointCloudInMemoryFromXYZ(), qCanupo2DViewDialog::resetBoundary(), cloudViewer::benchmarks::TestKDTreeLine0::setup(), ccGraphicalSegmentationTool::start(), and qCanupoTools::TrainClassifier().
| void ccPointCloud::clearFWFData | ( | ) |
Clears all associated FWF data.
| void ccPointCloud::clearLOD | ( | ) |
Clears the LOD structure.
|
overridevirtual |
Clones this entity.
All the main features of the entity are cloned, except from the octree and the points visibility information.
| destCloud | destination cloud can be provided here (must be of the exact same type as the cloned cloud!) |
| ignoreChildren | [optional] whether to ignore the cloud's children or not (in which case they will be cloned as well) |
Implements ccGenericPointCloud.
| ccPointCloud* ccPointCloud::cloneThis | ( | ccPointCloud * | destCloud = nullptr, |
| bool | ignoreChildren = false |
||
| ) |
Clones this entity.
All the main features of the entity are cloned, except from the octree and the points visibility information.
| destCloud | [optional] the destination cloud can be provided here |
| ignoreChildren | [optional] whether to ignore the cloud's children or not (in which case they will be cloned as well) |
Referenced by ComputeKmeansClustering(), cloudViewer::geometry::pybind_pointcloud(), and cloudViewer::geometry::pybind_trianglemesh().
| std::vector<int> ccPointCloud::ClusterDBSCAN | ( | double | eps, |
| size_t | min_points, | ||
| bool | print_progress = false |
||
| ) | const |
Cluster ccPointCloud using the DBSCAN algorithm Ester et al., "A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise", 1996.
Returns a list of point labels, -1 indicates noise according to the algorithm.
| eps | Density parameter that is used to find neighbouring points. |
| min_points | Minimum number of points to form a cluster. |
| print_progress | If true the progress is visualized in the console. |
Referenced by ccEntityAction::DBScanCluster(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::colorize | ( | float | r, |
| float | g, | ||
| float | b | ||
| ) |
Multiplies all color components of all points by coefficients.
If the cloud has no color, all points are considered white and the color array is automatically allocated.
| r | red component |
| g | green component |
| b | blue component |
Referenced by define_ccPointCloud(), cloudViewer::geometry::pybind_pointcloud(), and ccEntityAction::setColor().
|
inline |
Notify a modification of color / scalar field display parameters or contents
Definition at line 276 of file ecvPointCloud.h.
Referenced by TreeIso::Final_seg_pcd(), TreeIso::Init_seg_pcd(), TreeIso::Intermediate_seg_pcd(), ccColorFromScalarDlg::onApply(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::compressFWFData | ( | ) |
Compresses the associated FWF data container.
As the container is shared, the compressed version will be potentially added to the memory resulting in a decrease of the available memory...
Referenced by LASFWFFilter::saveToFile().
| std::tuple<std::shared_ptr<ccMesh>, std::vector<size_t> > ccPointCloud::ComputeConvexHull | ( | ) | const |
Function that computes the convex hull of the point cloud using qhull.
Referenced by ccEntityAction::ConvexHull(), and cloudViewer::geometry::pybind_pointcloud().
| QSharedPointer<cloudViewer::ReferenceCloud> ccPointCloud::computeCPSet | ( | ccGenericPointCloud & | otherCloud, |
| cloudViewer::GenericProgressCallback * | progressCb = nullptr, |
||
| unsigned char | octreeLevel = 0 |
||
| ) |
Computes the closest point of this cloud relatively to another cloud.
The output (reference) clouds will have as many points as this cloud (with the indexes pointing on the closest point in the other cloud)
Referenced by cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::computeFWFAmplitude | ( | double & | minVal, |
| double & | maxVal, | ||
| ecvProgressDialog * | pDlg = nullptr |
||
| ) | const |
Computes the maximum amplitude of all associated waveforms.
Referenced by ccWaveDialog::ccWaveDialog().
| CCVector3 ccPointCloud::computeGravityCenter | ( | ) |
Returns the cloud gravity center.
Referenced by ccPointPairRegistrationDlg::callHornRegistration(), and cloudViewer::geometry::pybind_pointcloud().
| std::vector<double> ccPointCloud::ComputeMahalanobisDistance | ( | ) | const |
Function to compute the Mahalanobis distance for points in an input point cloud.
See: https://en.wikipedia.org/wiki/Mahalanobis_distance
Referenced by convert(), and cloudViewer::geometry::pybind_pointcloud().
| std::vector<double> ccPointCloud::ComputeNearestNeighborDistance | ( | ) | const |
Function to compute the distance from a point to its nearest neighbor in the input point cloud
Referenced by cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::computeNormalsWithGrids | ( | double | minTriangleAngle_deg = 1.0, |
| ecvProgressDialog * | pDlg = nullptr |
||
| ) |
Compute the normals with the associated grid structure(s)
Can also orient the normals in the same run.
Referenced by define_ccPointCloud().
| bool ccPointCloud::computeNormalsWithOctree | ( | CV_LOCAL_MODEL_TYPES | model, |
| ccNormalVectors::Orientation | preferredOrientation, | ||
| PointCoordinateType | defaultRadius, | ||
| ecvProgressDialog * | pDlg = nullptr |
||
| ) |
Compute the normals by approximating the local surface around each point.
Referenced by define_ccPointCloud(), and CommandOctreeNormal::process().
| std::vector<double> ccPointCloud::ComputePointCloudDistance | ( | const ccPointCloud & | target | ) |
Function to compute the point to point distances between point clouds.
For each point in the source point cloud, compute the distance to the target point cloud.
| target | The target point cloud. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| double ccPointCloud::ComputeResolution | ( | ) | const |
| bool ccPointCloud::convertCurrentScalarFieldToColors | ( | bool | mixWithExistingColor = false | ) |
Converts current scalar field (values & display parameters) to RGB colors
Referenced by CommandSFConvertToRGB::process(), CommandVolume25D::process(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::convertNormalToDipDirSFs | ( | ccScalarField * | dipSF, |
| ccScalarField * | dipDirSF | ||
| ) |
Converts normals to two scalar fields: 'dip' and 'dip direction'.
One input scalar field may be empty if the corresponding value is not required
| [out] | dipSF | dip values |
| [out] | dipDirSF | dip direction values |
Referenced by ccEntityAction::convertNormalsTo(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::convertNormalToRGB | ( | ) |
Converts normals to RGB colors.
See ccNormalVectors::ConvertNormalToRGB
Referenced by ccEntityAction::convertNormalsTo(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::convertRGBToGreyScale | ( | ) |
Converts RGB to grey scale colors.
Referenced by cloudViewer::geometry::pybind_pointcloud(), and ccEntityAction::rgbToGreyScale().
|
static |
Factory function to create a pointcloud from a depth image and a camera model.
Given depth value d at (u, v) image coordinate, the corresponding 3d point is: z = d / depth_scale
x = (u - cx) * z / fx
y = (v - cy) * z / fy
| depth | The input depth image can be either a float image, or a uint16_t image. |
| intrinsic | Intrinsic parameters of the camera. |
| extrinsic | Extrinsic parameters of the camera. |
| depth_scale | The depth is scaled by 1 / depth_scale. |
| depth_trunc | Truncated at depth_trunc distance. |
| stride | Sampling factor to support coarse point cloud extraction. |
\Return An empty pointcloud if the conversion fails. If
| project_valid_depth_only | is true, return point cloud, which doesn't have nan point. If the value is false, return point cloud, which has a point for each pixel, whereas invalid depth results in NaN points. |
Referenced by cloudViewer::pipelines::integration::ScalableTSDFVolume::Integrate(), main(), and cloudViewer::geometry::pybind_pointcloud().
|
static |
Factory function to create a pointcloud from an RGB-D image and a camera model.
Given depth value d at (u, v) image coordinate, the corresponding 3d point is: z = d / depth_scale
x = (u - cx) * z / fx
y = (v - cy) * z / fy
| image | The input image. |
| intrinsic | Intrinsic parameters of the camera. |
| extrinsic | Extrinsic parameters of the camera. |
\Return An empty pointcloud if the conversion fails. If
| project_valid_depth_only | is true, return point cloud, which doesn't have nan point. If the value is false, return point cloud, which has a point for each pixel, whereas invalid depth results in NaN points. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| std::shared_ptr<ccPointCloud> ccPointCloud::CreateFromVoxelGrid | ( | const cloudViewer::geometry::VoxelGrid & | voxel_grid | ) |
Function to create a PointCloud from a VoxelGrid.
It transforms the voxel centers to 3D points using the original point cloud coordinate (with respect to the center of the voxel grid).
| voxel_grid | The input VoxelGrid. |
|
overridevirtual |
Implements ccGenericPointCloud.
Referenced by StereogramDialog::exportCurrentSelection().
| std::shared_ptr<ccPointCloud> ccPointCloud::Crop | ( | const ccBBox & | bbox | ) | const |
Function to crop ccPointCloud into output ccPointCloud.
All points with coordinates outside the bounding box bbox are clipped.
| bbox | ccBBox to crop points. |
Referenced by convert(), cloudViewer::t::geometry::LegacyCropByAxisAlignedBox(), cloudViewer::t::geometry::LegacyCropByOrientedBox(), and cloudViewer::geometry::pybind_pointcloud().
|
overridevirtual |
Crops the cloud inside (or outside) a bounding box.
| box | cropping box |
| inside | whether selected points are inside or outside the box |
Implements ccGenericPointCloud.
Referenced by ccCropTool::Crop().
| std::shared_ptr<ccPointCloud> ccPointCloud::Crop | ( | const ecvOrientedBBox & | bbox | ) | const |
Function to crop ccPointCloud into output ccPointCloud.
All points with coordinates outside the bounding box bbox are clipped.
| bbox | OrientedBoundingBox to crop points. |
|
overridevirtual |
Implements ccGenericPointCloud.
| cloudViewer::ReferenceCloud* ccPointCloud::crop2D | ( | const ccPolyline * | poly, |
| unsigned char | orthoDim, | ||
| bool | inside = true |
||
| ) |
Crops the cloud inside (or outside) a 2D polyline.
| poly | croping polyline |
| orthoDim | dimension orthogonal to the plane in which the segmentation should occur (X=0, Y=1, Z=2) |
| inside | whether selected points are inside or outside the polyline |
Referenced by define_ccPointCloud(), and cloudViewer::geometry::pybind_pointcloud().
|
overridevirtual |
Deletes all scalar fields associated to this cloud.
Reimplemented from cloudViewer::PointCloudTpl< ccGenericPointCloud >.
Referenced by ccCropTool::Crop(), and cloudViewer::geometry::pybind_pointcloud().
|
overridevirtual |
Deletes a specific scalar field.
WARNING: this operation may modify the scalar fields order (especially if the deleted SF is not the last one). However current IN & OUT scalar fields will stay up-to-date (while their index may change).
| index | index of scalar field to be deleted |
Reimplemented from cloudViewer::PointCloudTpl< ccGenericPointCloud >.
Referenced by ccScalarFieldArithmeticsDlg::Apply(), ccComparisonDlg::applyAndExit(), ccLibAlgorithms::ApplyCCLibAlgorithm(), ccTrace::buildCurvatureCost(), ccTrace::buildGradientCost(), ccComparisonDlg::cancelAndExit(), masc::Classifier::classify(), qCanupoProcess::Classify(), ccComparisonDlg::computeApproxDistances(), ccComparisonDlg::computeDistances(), ccLibAlgorithms::ComputeGeomCharacteristic(), ccEntityAction::convertNormalsTo(), ccMeasurementDevice::deleteScalarFieldFromCloud(), qPCV::doAction(), masc::Classifier::evaluate(), qFacets::extractFacets(), ccRegistrationTools::ICP(), CommandExtractCCs::process(), PCVCommand::Process(), cloudViewer::geometry::pybind_pointcloud(), SFCollector::releaseSFs(), RemoveScalarField(), and CommandRemoveSF::removeSF().
|
overrideprotectedvirtual |
Draws the entity only (not its children)
Reimplemented from ccHObject.
Reimplemented in ccSymbolCloud, and ccSNECloud.
Referenced by ccSNECloud::drawMeOnly().
|
inline |
Sets whether visibility check is enabled or not (e.g. during distances computation) See ccPointCloud::testVisibility.
Definition at line 618 of file ecvPointCloud.h.
Referenced by ccComparisonDlg::computeDistances().
| bool ccPointCloud::enhanceRGBWithIntensitySF | ( | int | sfIdx, |
| bool | useCustomIntensityRange = false, |
||
| double | minI = 0.0, |
||
| double | maxI = 1.0 |
||
| ) |
Enhances the RGB colors with the current scalar field (assuming it's intensities)
Referenced by ccEntityAction::enhanceRGBWithIntensities(), and cloudViewer::geometry::pybind_pointcloud().
| void ccPointCloud::EstimateCovariances | ( | const cloudViewer::geometry::KDTreeSearchParam & | search_param = cloudViewer::geometry::KDTreeSearchParamKNN() | ) |
Function to compute the covariance matrix for each point of a point cloud.
| search_param | The KDTree search parameters for neighborhood search. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::EstimateNormals | ( | const cloudViewer::geometry::KDTreeSearchParam & | search_param = cloudViewer::geometry::KDTreeSearchParamKNN(), |
| bool | fast_normal_computation = true |
||
| ) |
Function to compute the normals of a point cloud.
Normals are oriented with respect to the input point cloud if normals exist.
| search_param | The KDTree search parameters for neighborhood search. |
| fast_normal_computation | If true, the normal estiamtion uses a non-iterative method to extract the eigenvector from the covariance matrix. This is faster, but is not as numerical stable. |
Referenced by convert(), and cloudViewer::geometry::pybind_pointcloud().
|
static |
Static function to compute the covariance matrix for each point of a point cloud. Doesn't change the input PointCloud, just outputs the covariance matrices.
| input | PointCloud to use for covariance computation |
| search_param | The KDTree search parameters for neighborhood search. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::exportCoordToSF | ( | bool | exportDims[3] | ) |
Exports the specified coordinate dimension(s) to scalar field(s)
Referenced by ccEntityAction::exportCoordToSF(), CommandCoordToSF::process(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::exportNormalToSF | ( | bool | exportDims[3] | ) |
Exports the specified normal dimension(s) to scalar field(s)
Referenced by ccEntityAction::exportNormalToSF().
| std::shared_ptr<ccPointCloud> ccPointCloud::FarthestPointDownSample | ( | const size_t | num_samples, |
| const size_t | start_index = 0 |
||
| ) | const |
Function to downsample input pointcloud into output pointcloud with a set of points has farthest distance.
The sample is performed by selecting the farthest point from previous selected points iteratively, starting from start_index.
| num_samples | Number of points to be sampled. |
| start_index | Index to start downsampling from. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| ccPointCloud* ccPointCloud::filterPointsByScalarValue | ( | ScalarType | minVal, |
| ScalarType | maxVal, | ||
| bool | outside = false |
||
| ) |
Filters out points whose scalar values falls into an interval.
Threshold values should be expressed relatively to the current displayed scalar field.
| minVal | minimum value |
| maxVal | maximum value |
| outside | whether to select the points inside or outside of the specified interval |
Referenced by ecvFilterByLabelDlg::apply(), and cloudViewer::geometry::pybind_pointcloud().
| ccPointCloud* ccPointCloud::filterPointsByScalarValue | ( | std::vector< ScalarType > | values, |
| bool | outside = false |
||
| ) |
Filters out points whose scalar values falls into an interval.
Threshold values should be expressed relatively to the current displayed scalar field.
| values | filter scalar values |
| outside | whether to select the points inside or outside of the specified interval |
|
static |
Creates a new point cloud object from a GenericCloud.
"GenericCloud" is a very simple and light interface from cloudViewer. It is meant to give access to points coordinates of any cloud (on the condition it implements the GenericCloud interface of course). See cloudViewer documentation for more information about GenericClouds. As the GenericCloud interface is very simple, only points are imported. Note: throws an 'int' exception in case of error (see CTOR_ERRORS)
| cloud | a GenericCloud structure |
| sourceCloud | cloud from which main parameters will be imported (optional) |
|
static |
Function to select points from input ccPointCloud into output ccPointCloud.
Points with indices in
| indices | are selected. |
| sourceCloud. | |
| indices | Indices of points to be selected. |
| invert | Set to True to invert the selection of indices. |
|
static |
Creates a new point cloud object from a GenericIndexedCloud.
"GenericIndexedCloud" is an extension of GenericCloud (from cloudViewer) which provides a const random accessor to points. See cloudViewer documentation for more information about GenericIndexedCloud. As the GenericIndexedCloud interface is very simple, only points are imported. Note: throws an 'int' exception in case of error (see CTOR_ERRORS)
| cloud | a GenericIndexedCloud structure |
| sourceCloud | cloud from which main parameters will be imported (optional) |
Referenced by ccCropTool::Crop(), cloudViewer::geometry::pybind_pointcloud(), and ccEntityAction::RansacSegmentation().
|
overrideprotectedvirtual |
Loads own object data.
Called by 'fromFile' (recursive scheme) To be overloaded (but still called ;) by subclass.
| in | input file |
| dataVersion | file version |
| flags | deserialization flags (see ccSerializableObject::DeserializationFlags) |
| oldToNewIDMap | map to link old IDs with new IDs |
Reimplemented from ccGenericPointCloud.
|
inline |
Gives access to the associated FWF data container.
Definition at line 525 of file ecvPointCloud.h.
Referenced by ccPropertiesTreeDelegate::fillWithPointCloud(), LasWaveformLoader::LasWaveformLoader(), LASFWFFilter::loadFile(), and LASFWFFilter::saveToFile().
|
inline |
Gives access to the associated FWF data container (const version)
Definition at line 527 of file ecvPointCloud.h.
|
inline |
Gives access to the FWF descriptors.
Definition at line 510 of file ecvPointCloud.h.
Referenced by ccPropertiesTreeDelegate::fillWithPointCloud(), LASFWFFilter::loadFile(), LasWaveformLoader::loadWaveform(), and LASFWFFilter::saveToFile().
|
inline |
Gives access to the FWF descriptors (const version)
Definition at line 512 of file ecvPointCloud.h.
|
overridevirtual |
Returns an axis-aligned bounding box of the geometry.
Reimplemented from ccHObject.
Referenced by cloudViewer::visualization::rendering::PointCloudBuffersBuilder::ComputeAABB().
|
inlineoverridevirtual |
Returns the center of the geometry coordinates.
Reimplemented from ccHObject.
Definition at line 970 of file ecvPointCloud.h.
References Vector3Tpl< PointCoordinateType >::fromArrayContainer().
|
inlineoverridevirtual |
Returns class ID.
Reimplemented from ccHObject.
Definition at line 167 of file ecvPointCloud.h.
References CV_TYPES::POINT_CLOUD.
| ccScalarField* ccPointCloud::getCurrentDisplayedScalarField | ( | ) | const |
Returns the currently displayed scalar (or 0 if none)
Referenced by ccRasterizeTool::activeLayerChanged(), ccRasterizeTool::addNewContour(), ccColorFromScalarDlg::ccColorFromScalarDlg(), qCanupoProcess::Classify(), MLSSmoothingUpsampling::compute(), ccEntityAction::computeStatParams(), define_ccPointCloud(), qSRA::doProjectCloudDistsInGrid(), qCanupoPlugin::doTrainAction(), ccDBRoot::editLabelScalarValue(), DistanceMapGenerationDlg::exportMapAsCloud(), ccPropertiesTreeDelegate::fillSFWithPointCloud(), ccRasterizeTool::generateContours(), ccRasterizeTool::generateImage(), ccTrace::getSegmentCostScalar(), ccTrace::getSegmentCostScalarInv(), ccRegistrationTools::ICP(), E57Filter::loadFile(), cloudViewer::geometry::pybind_pointcloud(), qCanupoClassifDialog::qCanupoClassifDialog(), RefinePointClassif(), ccEntityAction::rgbGaussianFilter(), ccColorScaleEditorDialog::saveCurrentScale(), ccPropertiesTreeDelegate::setEditorData(), ecvFilterByLabelDlg::setInputEntity(), ccEntityAction::sfConvertToRandomRGB(), ccEntityAction::sfConvertToRGB(), ccEntityAction::sfGaussianFilter(), ccEntityAction::sfRename(), ccEntityAction::sfSetAsCoord(), ccComparisonDlg::showHisto(), ecvFilterByLabelDlg::start(), ccEntityAction::statisticalTest(), and ccColorFromScalarDlg::~ccColorFromScalarDlg().
| int ccPointCloud::getCurrentDisplayedScalarFieldIndex | ( | ) | const |
Returns the currently displayed scalar field index (or -1 if none)
Referenced by ecvFilterByLabelDlg::apply(), ccLibAlgorithms::ApplyCCLibAlgorithm(), ccColorFromScalarDlg::ccColorFromScalarDlg(), define_ccPointCloud(), ccComparisonDlg::prepareEntitiesForComparison(), CommandSFConvertToRGB::process(), CommandCanupoClassif::process(), ccEntityAction::processMeshSF(), cloudViewer::geometry::pybind_pointcloud(), CommandRemoveSF::removeSF(), ccEntityAction::rgbGaussianFilter(), SaveScan(), ccPropertiesTreeDelegate::setEditorData(), ccEntityAction::sfGaussianFilter(), and ccEntityAction::statisticalTest().
|
overridevirtual |
Returns main OpenGL parameters for this entity.
These parameters are deduced from the visibility states of its different features (points, normals, etc.).
| params | a glDrawParams structure |
Reimplemented from ccDrawableObject.
Referenced by ccSymbolCloud::drawMeOnly().
| Eigen::Vector3d ccPointCloud::getEigenColor | ( | size_t | index | ) | const |
| std::vector<Eigen::Vector3d> ccPointCloud::getEigenColors | ( | ) | const |
| Eigen::Vector3d ccPointCloud::getEigenNormal | ( | size_t | index | ) | const |
Referenced by cloudViewer::pipelines::registration::CorrespondenceCheckerBasedOnNormal::Check(), cloudViewer::pipelines::registration::TransformationEstimationForColoredICP::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationPointToPlane::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationForColoredICP::ComputeTransformation(), cloudViewer::pipelines::registration::TransformationEstimationPointToPlane::ComputeTransformation(), cloudViewer::visualization::rendering::PointCloudBuffersBuilder::ConstructBuffers(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::io::WritePointCloudToPLY(), and cloudViewer::io::WritePointCloudToXYZN().
| std::vector<Eigen::Vector3d> ccPointCloud::getEigenNormals | ( | ) | const |
|
inlineoverridevirtual |
Returns max bounds for geometry coordinates.
Reimplemented from ccHObject.
Definition at line 967 of file ecvPointCloud.h.
References Vector3Tpl< PointCoordinateType >::fromArrayContainer().
|
inlineoverridevirtual |
Returns min bounds for geometry coordinates.
Reimplemented from ccHObject.
Definition at line 963 of file ecvPointCloud.h.
References Vector3Tpl< PointCoordinateType >::fromArrayContainer().
|
overridevirtual |
If per-point normals are available, returns the one at a specific index.
Reimplemented from cloudViewer::GenericIndexedCloud.
| std::vector<CompressedNormType> ccPointCloud::getNorms | ( | ) | const |
| void ccPointCloud::getNorms | ( | std::vector< CompressedNormType > & | idxes | ) | const |
|
overridevirtual |
Reimplemented from ccHObject.
|
overridevirtual |
Returns color corresponding to a given point.
WARNING: color array must be enabled! (see ccDrawableObject::hasColors)
Implements ccGenericPointCloud.
Referenced by ccTrace::buildGradientCost(), ComputeAverageColor(), ComputeKmeansClustering(), cloudViewer::pipelines::registration::TransformationEstimationForColoredICP::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationForColoredICP::ComputeTransformation(), contourPoly(), contourPoly2(), ccSymbolCloud::drawMeOnly(), PointCloudWrapper< Real >::getColor(), GetKeyCluster(), getMortarMaps(), ccTrace::getSegmentCostDark(), ccTrace::getSegmentCostGrad(), ccTrace::getSegmentCostRGB(), ccCloudLayersHelper::mouseMove(), ccTrace::optimizeSegment(), ColorScalarFieldWrapper::pointValue(), rotY(), LasSaver::saveNextPoint(), SaveScan(), ccCloudLayersHelper::saveState(), MAFilter::saveToFile(), LASFWFFilter::saveToFile(), and ccCloudLayersHelper::setVisible().
| ecvColor::Rgb& ccPointCloud::getPointColorPtr | ( | size_t | pointIndex | ) |
Referenced by cloudViewer::ModelViewerWidget::SelectObject().
|
inline |
Definition at line 577 of file ecvPointCloud.h.
Referenced by cloudViewer::io::rpc::SetPointCloud(), and cloudViewer::io::rpc::SetTriangleMesh().
|
overridevirtual |
Returns scalar value associated to a given point.
The returned value is taken from the current displayed scalar field WARNING: scalar field must be enabled! (see ccDrawableObject::hasDisplayedScalarField)
Implements ccGenericPointCloud.
|
overridevirtual |
Returns normal corresponding to a given point.
WARNING: normals array must be enabled! (see ccDrawableObject::hasNormals)
Implements ccGenericPointCloud.
Referenced by ccSNECloud::drawMeOnly(), ccCompass::estimateStrain(), ccCompass::estimateStructureNormals(), PointCloudWrapper< Real >::getNormal(), ccTrace::getPointNormal(), StereogramWidget::init(), NormDipAndDipDirFieldWrapper::pointValue(), SaveScan(), and StereogramDialog::updateFacetsFilter().
|
overridevirtual |
Returns compressed normal corresponding to a given point.
WARNING: normals array must be enabled! (see ccDrawableObject::hasNormals)
Implements ccGenericPointCloud.
Referenced by ccTrace::fitPlane().
| CCVector3& ccPointCloud::getPointNormalPtr | ( | size_t | pointIndex | ) | const |
| std::vector<CCVector3> ccPointCloud::getPointNormals | ( | ) | const |
| std::vector<CCVector3*> ccPointCloud::getPointNormalsPtr | ( | ) | const |
Referenced by cloudViewer::io::rpc::SetPointCloud(), and cloudViewer::io::rpc::SetTriangleMesh().
|
overridevirtual |
Returns color corresponding to a given point associated scalar value.
The returned value depends on the current scalar field display parameters. It may even be 0 if the value shouldn't be displayed. WARNING: scalar field must be enabled! (see ccDrawableObject::hasDisplayedScalarField)
Implements ccGenericPointCloud.
|
overridevirtual |
Returns color corresponding to a given scalar value.
The returned value depends on the current scalar field display parameters. It may even be 0 if the value shouldn't be displayed. WARNING: scalar field must be enabled! (see ccDrawableObject::hasDisplayedScalarField)
Implements ccGenericPointCloud.
|
overridevirtual |
Returns object unqiue ID used for display.
Reimplemented from ccHObject.
|
inline |
Returns an associated grid.
Definition at line 443 of file ecvPointCloud.h.
Referenced by ccPropertiesTreeDelegate::fillWithPointCloud().
|
inline |
Returns an associated grid (const verson)
Definition at line 445 of file ecvPointCloud.h.
|
inline |
Returns the number of associated grids.
Definition at line 441 of file ecvPointCloud.h.
Referenced by ccEntityAction::computeNormals(), ccPropertiesTreeDelegate::fillWithPointCloud(), and ccDBRoot::getSelectedEntities().
|
overridevirtual |
Returns whether colors are enabled or not.
Reimplemented from ccDrawableObject.
Referenced by ccRasterizeTool::activeLayerChanged(), MeshWrapper< Real >::addColor(), LasCloudChunk::addLasFieldsToCloud(), ecvPoissonReconDlg::adjustParams(), ccCloudLayersHelper::ccCloudLayersHelper(), ccEntityAction::changeColorLevels(), masc::PointFeature::checkValidity(), GeneralFilters::compute(), cloudViewer::pipelines::registration::TransformationEstimationForColoredICP::ComputeTransformation(), cloudViewer::visualization::rendering::PointCloudBuffersBuilder::ConstructBuffers(), qPoissonRecon::doAction(), ccEntityAction::enhanceRGBWithIntensities(), cloudViewer::pipelines::integration::ScalableTSDFVolume::ExtractTriangleMesh(), cloudViewer::pipelines::integration::UniformTSDFVolume::ExtractTriangleMesh(), cloudViewer::t::geometry::PointCloud::FromLegacy(), ccDBRoot::gatherRecursiveInformation(), PointCloudWrapper< Real >::getColor(), ccTrace::getSegmentCost(), LasScalarFieldLoader::handleRGBValue(), LasSaveDialog::handleSelectedPointFormatChange(), LasCloudChunk::hasColors(), PointCloudWrapper< Real >::hasColors(), BasePclModule::hasSelectedRGB(), ColorScalarFieldWrapper::isValid(), LasSaver::LasSaver(), DRCFilter::loadFile(), LASFilter::loadFile(), ccColorFromScalarDlg::onApply(), MinimumCutSegmentation::openInputDialog(), RegionGrowingSegmentation::openInputDialog(), ccTrace::optimizeSegment(), cloudViewer::pipelines::registration::RegistrationColoredICP(), ccEntityAction::rgbGaussianFilter(), ccEntityAction::rgbToGreyScale(), LasSaver::saveNextPoint(), SaveScan(), PcdFilter::saveToFile(), LASFWFFilter::saveToFile(), LasDetails::SelectBestVersion(), cloudViewer::io::rpc::SetPointCloud(), ccEntityAction::sfFromColor(), ecvPoissonReconDlg::start(), cloudViewer::io::WritePointCloudToPLY(), cloudViewer::io::WritePointCloudToPTS(), and cloudViewer::io::WritePointCloudToXYZRGB().
|
inline |
Returns 'true' if the point cloud contains per-point covariance matrix.
Definition at line 988 of file ecvPointCloud.h.
Referenced by cloudViewer::pipelines::registration::TransformationEstimationForGeneralizedICP::ComputeTransformation(), and cloudViewer::geometry::pybind_pointcloud().
|
overridevirtual |
Returns whether an active scalar field is available or not.
Reimplemented from ccDrawableObject.
Referenced by LasCloudChunk::addLasFieldsToCloud(), ccTrace::getSegmentCost(), and ccEntityAction::rgbGaussianFilter().
| bool ccPointCloud::hasFWF | ( | ) | const |
Returns whether the cloud has associated Full WaveForm data.
Referenced by ccPropertiesTreeDelegate::fillWithPointCloud(), LasSaveDialog::handleSelectedPointFormatChange(), ccWaveWidget::init(), LasSaver::LasSaver(), LASFWFFilter::saveToFile(), and LasDetails::SelectBestVersion().
|
overridevirtual |
Returns whether normals are enabled or not.
Reimplemented from ccDrawableObject.
Referenced by MeshWrapper< Real >::addNormal(), cloudViewer::pipelines::registration::CorrespondenceCheckerBasedOnNormal::Check(), masc::PointFeature::checkValidity(), NormalEstimation::compute(), ProjectionFilter::compute(), GreedyTriangulation::compute(), MarchingCubeReconstruction::compute(), PoissonReconstruction::compute(), FastGlobalRegistrationFilter::compute(), qM3C2Process::Compute(), cloudViewer::pipelines::registration::TransformationEstimationPointToPlane::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationForColoredICP::ComputeTransformation(), cloudViewer::pipelines::registration::TransformationEstimationPointToPlane::ComputeTransformation(), cloudViewer::visualization::rendering::PointCloudBuffersBuilder::ConstructBuffers(), convert(), ccEntityAction::convertNormalsTo(), qFacets::createFacets(), qPoissonRecon::doAction(), ccEntityAction::exportNormalToSF(), qFacets::extractFacets(), ccTrace::fitPlane(), cloudViewer::t::geometry::PointCloud::FromLegacy(), ccDBRoot::gatherRecursiveInformation(), PointCloudWrapper< Real >::getNormal(), qM3C2Dialog::getNormalsComputationMode(), FastGlobalRegistrationFilter::getParametersFromDialog(), ccTrace::getPointNormal(), PointCloudWrapper< Real >::hasNormals(), StereogramWidget::init(), ccEntityAction::invertNormals(), NormDipAndDipDirFieldWrapper::isValid(), DRCFilter::loadFile(), ccEntityAction::orientNormalsFM(), ccEntityAction::orientNormalsMST(), CommandOctreeNormal::process(), CommandInvertNormal::process(), CommandConvertNormalsToDipAndDipDir::process(), CommandConvertNormalsToSFs::process(), CommandOrientNormalsMST::process(), cloudViewer::visualization::MessageProcessor::ProcessMessage(), cloudViewer::pipelines::registration::RegistrationColoredICP(), cloudViewer::pipelines::registration::RegistrationICP(), masc::PointFeature::retrieveField(), SaveScan(), PcdFilter::saveToFile(), cloudViewer::io::rpc::SetPointCloud(), StereogramDialog::updateFacetsFilter(), qM3C2Dialog::updateNormalComboBox(), cloudViewer::io::WritePointCloudToPLY(), and cloudViewer::io::WritePointCloudToXYZN().
|
overridevirtual |
Returns whether one or more scalar fields are instantiated.
WARNING: doesn't mean a scalar field is currently displayed (see ccDrawableObject::hasDisplayedScalarField).
Reimplemented from ccDrawableObject.
Referenced by ccScalarFieldArithmeticsDlg::Apply(), GeneralFilters::compute(), ccVolumeCalcTool::convertGridToCloud(), ccVolumeCalcTool::ConvertGridToCloud(), qCloudLayers::doAction(), ccEntityAction::enhanceRGBWithIntensities(), GetScalarFieldIndex(), ccCloudLayersHelper::getScalarFields(), BasePclModule::hasSelectedScalarField(), ccEntityAction::interpolateSFs(), MinimumCutSegmentation::openInputDialog(), RegionGrowingSegmentation::openInputDialog(), CommandRasterize::process(), CommandVolume25D::process(), SimpleBinFilter::saveToFile(), and qM3C2Dialog::setupPrecisionMapsTab().
| bool ccPointCloud::hasSensor | ( | ) | const |
Returns whether the mesh as an associated sensor or not.
Referenced by ccComparisonDlg::ccComparisonDlg(), ccEntityAction::computeNormals(), and cloudViewer::geometry::pybind_pointcloud().
| std::tuple<std::shared_ptr<ccMesh>, std::vector<size_t> > ccPointCloud::HiddenPointRemoval | ( | const Eigen::Vector3d & | camera_location, |
| const double | radius | ||
| ) | const |
This is an implementation of the Hidden Point Removal operator described in Katz et. al. 'Direct Visibility of Point Sets', 2007.
Additional information about the choice of radius for noisy point clouds can be found in Mehra et. al. 'Visibility of Noisy Point Cloud Data', 2010.
| camera_location | All points not visible from that location will be removed. |
| radius | The radius of the sperical projection. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| void ccPointCloud::hidePointsByScalarValue | ( | ScalarType | minVal, |
| ScalarType | maxVal | ||
| ) |
Hides points whose scalar values falls into an interval.
Values are taken from the current OUTPUT scalar field.
| minVal | minimum value (below, points are hidden) |
| maxVal | maximum value (above, points are hidden) |
Referenced by ecvFilterByLabelDlg::apply(), and cloudViewer::geometry::pybind_pointcloud().
| void ccPointCloud::hidePointsByScalarValue | ( | std::vector< ScalarType > | values | ) |
Hides points whose scalar values falls into an interval.
Values are taken from the current OUTPUT scalar field.
| values | scalar values (equal, points are hidden) |
| bool ccPointCloud::initLOD | ( | ) |
Intializes the LOD structure.
| bool ccPointCloud::interpolateColorsFrom | ( | ccGenericPointCloud * | cloud, |
| cloudViewer::GenericProgressCallback * | progressCb = nullptr, |
||
| unsigned char | octreeLevel = 0 |
||
| ) |
Interpolate colors from another cloud (nearest neighbor only)
Referenced by cloudViewer::geometry::pybind_pointcloud().
|
overridevirtual |
Invalidates bounding box.
Bounding box will be recomputed next time a request is made to 'getBoundingBox'.
Reimplemented from cloudViewer::PointCloudTpl< ccGenericPointCloud >.
Referenced by qM3C2Process::Compute(), ccGraphicalSegmentationTool::doExportSegmentationPolyline(), ccRasterizeTool::exportContourLines(), cloudViewer::geometry::pybind_pointcloud(), ccPointPairRegistrationDlg::removeAlignedPoint(), ccPointPairRegistrationDlg::removeRefPoint(), and ccEntityAction::sfSetAsCoord().
| void ccPointCloud::invertNormals | ( | ) |
Inverts normals (if any)
Referenced by ccEntityAction::invertNormals(), CommandInvertNormal::process(), and cloudViewer::geometry::pybind_pointcloud().
|
inlineoverridevirtual |
Reimplemented from ccHObject.
Definition at line 961 of file ecvPointCloud.h.
Referenced by cloudViewer::geometry::pybind_pointcloud(), and cloudViewer::io::WritePointCloudToPLY().
|
overrideprotectedvirtual |
Returns the minimum file version required to save this instance's own data To be overloaded (but still called ;) by subclass. Used internally by minimumFileVersion() to compute the overall minimum.
Reimplemented from ccGenericPointCloud.
| ccPointCloud& ccPointCloud::NormalizeNormals | ( | ) |
Normalize point normals to length 1.`.
Referenced by cloudViewer::geometry::pybind_pointcloud().
|
inline |
Returns pointer on compressed normals indexes table.
Definition at line 917 of file ecvPointCloud.h.
Referenced by qM3C2Process::Compute().
|
inlineoverridevirtual |
Returns whether normals are available.
Reimplemented from cloudViewer::GenericIndexedCloud.
Definition at line 566 of file ecvPointCloud.h.
|
inline |
Notify a modification of normals display parameters or contents.
Definition at line 280 of file ecvPointCloud.h.
Referenced by ccCompass::estimateStructureNormals(), and cloudViewer::geometry::pybind_pointcloud().
|
overrideprotectedvirtual |
Notifies all dependent entities that the geometry of this entity has changed
Reimplemented from ccHObject.
|
inline |
Definition at line 252 of file ecvPointCloud.h.
| const ccPointCloud& ccPointCloud::operator+= | ( | ccPointCloud * | ) |
| const ccPointCloud& ccPointCloud::operator+= | ( | const ccPointCloud & | cloud | ) |
| ccPointCloud& ccPointCloud::operator= | ( | const ccPointCloud & | cloud | ) |
Fuses another 3D entity with this one.
All the main features of the given entity are added, except from the octree and the points visibility information. Those features are deleted on this cloud.
| void ccPointCloud::OrientNormalsConsistentTangentPlane | ( | size_t | k | ) |
Function to consistently orient estimated normals based on consistent tangent planes as described in Hoppe et al., "Surface Reconstruction from Unorganized Points", 1992.
| k | k nearest neighbour for graph reconstruction for normal propagation. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::OrientNormalsToAlignWithDirection | ( | const Eigen::Vector3d & | orientation_reference = Eigen::Vector3d(0.0, 0.0, 1.0) | ) |
Function to orient the normals of a point cloud.
| orientation_reference | Normals are oriented with respect to orientation_reference. |
Referenced by convert(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::OrientNormalsTowardsCameraLocation | ( | const Eigen::Vector3d & | camera_location = Eigen::Vector3d::Zero() | ) |
Function to orient the normals of a point cloud.
| camera_location | Normals are oriented with towards the camera_location. |
Referenced by convert(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::orientNormalsTowardViewPoint | ( | CCVector3 & | VP, |
| ecvProgressDialog * | pDlg = nullptr |
||
| ) |
Normals are forced to point to O.
Referenced by define_ccPointCloud().
| bool ccPointCloud::orientNormalsWithFM | ( | unsigned char | level, |
| ecvProgressDialog * | pDlg = nullptr |
||
| ) |
Orient normals with Fast Marching.
Referenced by define_ccPointCloud(), and ccEntityAction::orientNormalsFM().
| bool ccPointCloud::orientNormalsWithGrids | ( | ecvProgressDialog * | pDlg = nullptr | ) |
Orient the normals with the associated grid structure(s)
| bool ccPointCloud::orientNormalsWithMST | ( | unsigned | kNN = 6, |
| ecvProgressDialog * | pDlg = nullptr |
||
| ) |
Orient the normals with a Minimum Spanning Tree.
Referenced by define_ccPointCloud(), ccEntityAction::orientNormalsMST(), and CommandOrientNormalsMST::process().
| ccPointCloud& ccPointCloud::PaintUniformColor | ( | const Eigen::Vector3d & | color | ) |
Assigns each vertex in the ccMesh the same color.
| color | RGB colors of vertices. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| ccPointCloud* ccPointCloud::partialClone | ( | const cloudViewer::ReferenceCloud * | selection, |
| int * | warnings = nullptr, |
||
| bool | withChildEntities = true |
||
| ) | const |
Creates a new point cloud object from a ReferenceCloud (selection)
"Reference clouds" are a set of indexes referring to a real point cloud. See CClib documentation for more information about ReferenceClouds. Warning: the ReferenceCloud structure must refer to this cloud.
| [in] | selection | a ReferenceCloud structure (pointing to source) |
| [out] | warnings | [optional] to determine if warnings (CTOR_ERRORS) occurred during the duplication process |
| [in] | withChildEntities | whether child entities should be transferred as well (see ccHObjectCaster::CloneChildren) |
Referenced by qFacets::createFacets(), ccCropTool::Crop(), qCSF::doAction(), qCanupoPlugin::doClassifyAction(), GrainsAsEllipsoids::fitEllipsoidToGrain(), G3Point::G3PointAction::getBorders(), getMortarMaps(), KNNRegions(), masc::CorePoints::prepare(), CommandSubsample::process(), CommandExtractCCs::process(), CommandSORFilter::process(), CommandCPS::process(), CommandCSF::process(), cloudViewer::geometry::pybind_pointcloud(), and GrainsAsEllipsoids::updateMeshAndLineSet().
|
inline |
Notify a modification of points display parameters or contents.
Definition at line 284 of file ecvPointCloud.h.
Referenced by cloudViewer::geometry::pybind_pointcloud().
| std::shared_ptr<ccPointCloud> ccPointCloud::RandomDownSample | ( | double | sampling_ratio | ) | const |
Function to downsample input pointcloud into output pointcloud randomly.
The sample is performed by randomly selecting the index of the points in the pointcloud.
| sampling_ratio | Sampling ratio, the ratio of sample to total number of points in the pointcloud. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
|
inlineoverridevirtual |
Forces bounding-box update.
Implements ccGenericPointCloud.
Definition at line 603 of file ecvPointCloud.h.
Referenced by DistanceMapGenerationTool::ConvertCloudToConical(), and DistanceMapGenerationTool::ConvertCloudToCylindrical().
|
protected |
Release VBOs.
|
inline |
Remove all associated grids.
Definition at line 458 of file ecvPointCloud.h.
| ccPointCloud& ccPointCloud::RemoveNonFinitePoints | ( | bool | remove_nan = true, |
| bool | remove_infinite = true |
||
| ) |
Remove all points fromt he point cloud that have a nan entry, or infinite entries.
Also removes the corresponding normals and color entries.
| remove_nan | Remove NaN values from the ccPointCloud. |
| remove_infinite | Remove infinite values from the ccPointCloud. |
Referenced by cloudViewer::geometry::pybind_pointcloud(), and cloudViewer::io::ReadPointCloud().
|
overrideprotectedvirtual |
Implements ccGenericPointCloud.
| std::tuple<std::shared_ptr<ccPointCloud>, std::vector<size_t> > ccPointCloud::RemoveRadiusOutliers | ( | size_t | nb_points, |
| double | search_radius | ||
| ) | const |
Function to remove points that have less than nb_points in a sphere of a given radius.
| nb_points | Number of points within the radius. |
| search_radius | Radius of the sphere. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| std::tuple<std::shared_ptr<ccPointCloud>, std::vector<size_t> > ccPointCloud::RemoveStatisticalOutliers | ( | size_t | nb_neighbors, |
| double | std_ratio | ||
| ) | const |
Function to remove points that are further away from their nb_neighbor neighbors in average.
| nb_neighbors | Number of neighbors around the target point. |
| std_ratio | Standard deviation ratio. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
|
overridevirtual |
Removes all the 'visible' points (as defined by the visibility array)
| visTable | visibility table (optional, otherwise the cloud's default one will be used) |
| newIndexes | optional: stores the new indexes of the points (either an index >= 0 if kept, or -1 if not). Must be initially empty or have the same size as the original cloud. |
Implements ccGenericPointCloud.
|
overridevirtual |
Reserves memory for all the active features.
This method is meant to be called before increasing the cloud population. Only the already allocated features will be re-reserved.
Reimplemented from cloudViewer::PointCloudTpl< ccGenericPointCloud >.
Reimplemented in ccSymbolCloud.
Referenced by ccPointPairRegistrationDlg::addAlignedPoint(), qCanupo2DViewDialog::addOrSelectPoint(), ccGraphicalSegmentationTool::addPointToPolyline(), ccPointPairRegistrationDlg::addReferencePoint(), ccTracePolylineTool::ccTracePolylineTool(), MeshWrapper< Real >::checkVertexCapacity(), qVoxFallProcess::Compute(), ccEntityAction::computeNormals(), ccTopologyRelation::constructGraphic(), DistanceMapGenerationTool::ConvertConicalMapToMesh(), DistanceMapGenerationTool::ConvertMapToCloud(), DistanceMapGenerationTool::ConvertProfileToMesh(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), ccCompass::estimateP21(), ccCompass::estimateStructureNormals(), ccPointListPickingDlg::exportToNewCloud(), ccPointListPickingDlg::exportToNewPolyline(), ccContourExtractor::ExtractConcaveHull2D(), ccContourExtractor::ExtractFlatContour(), FromFbxMesh(), ccRasterizeTool::generateContours(), GetConeProfile(), FastGlobalRegistrationFilter::getParametersFromDialog(), STEPFilter::importStepFile(), ProfileLoader::Load(), LoadCloud(), CSVMatrixFilter::loadFile(), SalomeHydroFilter::loadFile(), SinusxFilter::loadFile(), LASFWFFilter::loadFile(), RDBFilter::loadFile(), LoadScan(), ccTracePolylineTool::onItemPicked(), masc::ContextBasedFeature::prepare(), CommandCrop2D::process(), cloudViewer::geometry::pybind_pointcloud(), ccSymbolCloud::reserve(), qCanupo2DViewDialog::resetBoundary(), DistanceMapGenerationDlg::toggleOverlayGrid(), Cloth::toMesh(), qCanupoTools::TrainClassifier(), and GrainsAsEllipsoids::updateMeshAndLineSet().
| bool ccPointCloud::reserveTheFWFTable | ( | ) |
Reserves the FWF table.
| bool ccPointCloud::reserveTheNormsTable | ( | ) |
Reserves memory to store the compressed normals.
Before adding normals to the cloud (with addNorm()) be sure to reserve the necessary amount of memory with this method. This method reserves memory for as many normals as the number of points in the cloud (effectively stored or reserved).
Referenced by MeshWrapper< Real >::addNormal(), define_ccPointCloud(), ccCompass::estimateStructureNormals(), FromFbxMesh(), LoadCloud(), RDBFilter::loadFile(), LoadScan(), cloudViewer::visualization::MessageProcessor::ProcessMessage(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::io::ReadModelUsingAssimp(), cloudViewer::io::ReadPointCloudFromPLY(), and cloudViewer::t::geometry::PointCloud::ToLegacy().
| bool ccPointCloud::reserveThePointsTable | ( | unsigned | _numberOfPoints | ) |
Reserves memory to store the points coordinates.
Before adding points to the cloud (with addPoint()) be sure to reserve the necessary amount of memory with this method. If the number of new elements is smaller than the actual one, nothing will happen.
| _numberOfPoints | number of points to reserve the memory for |
Referenced by contourPoly(), contourPoly2(), define_ccPointCloud(), ccMeasurementDevice::fitPlaneToPoints(), cloudViewer::t::geometry::FromLegacyPointCloud(), getDensity(), getMortarMaps(), SoiFilter::loadFile(), DistanceMapGenerationDlg::loadOverlaySymbols(), cloudViewer::visualization::MessageProcessor::ProcessMessage(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::io::ReadModelUsingAssimp(), cloudViewer::io::ReadTriangleMeshFromOBJ(), LasCloudChunk::reserveSize(), rotY(), and cloudViewer::t::geometry::PointCloud::ToLegacy().
| bool ccPointCloud::reserveTheRGBTable | ( | ) |
Reserves memory to store the RGB colors.
Before adding colors to the cloud (with addRGBColor()) be sure to reserve the necessary amount of memory with this method. This method reserves memory for as many colors as the number of points in the cloud (effectively stored or reserved).
Referenced by MeshWrapper< Real >::addColor(), contourPoly(), contourPoly2(), cloudViewer::pipelines::integration::UniformTSDFVolume::ExtractTriangleMesh(), FromFbxMesh(), cloudViewer::t::geometry::FromLegacyPointCloud(), getMortarMaps(), LasScalarFieldLoader::handleRGBValue(), LoadCloud(), CSVMatrixFilter::loadFile(), SoiFilter::loadFile(), LASFWFFilter::loadFile(), LASFilter::loadFile(), RDBFilter::loadFile(), LoadScan(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::io::ReadModelUsingAssimp(), cloudViewer::io::ReadTriangleMeshFromOBJ(), rotY(), cloudViewer::t::geometry::PointCloud::ToLegacy(), and qCanupoTools::TrainClassifier().
|
overridevirtual |
Resizes all the active features arrays.
This method is meant to be called after having increased the cloud population (if the final number of inserted point is lower than the reserved size). Otherwise, it fills all new elements with blank values.
Reimplemented from cloudViewer::PointCloudTpl< ccGenericPointCloud >.
Reimplemented in ccSymbolCloud.
Referenced by ccPointPairRegistrationDlg::clear(), qM3C2Process::Compute(), ComputeKmeansClustering(), DistanceMapGenerationTool::ConvertMapToCloud(), cloudViewer::t::geometry::FromLegacyPointCloud(), SinusxFilter::loadFile(), LASFilter::loadFile(), LoadScan(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::io::ReadPointCloudFromPLY(), cloudViewer::io::ReadPointCloudFromPTS(), cloudViewer::io::ReadTriangleMeshFromPLY(), ccPointPairRegistrationDlg::removeAlignedPoint(), ccPointPairRegistrationDlg::removeRefPoint(), ccSymbolCloud::resize(), ccPointPairRegistrationDlg::unstackAligned(), ccPointPairRegistrationDlg::unstackRef(), GrainsAsEllipsoids::updateMeshAndLineSet(), and ccGraphicalSegmentationTool::updatePolyLine().
| bool ccPointCloud::resizeTheFWFTable | ( | ) |
Resizes the FWF table.
| bool ccPointCloud::resizeTheNormsTable | ( | ) |
Resizes the compressed normals array.
If possible, the normals array is resized to fit exactly the number of points in the cloud (effictively stored or reserved). If the new size is inferior to the actual one, the last elements will be deleted. Otherwise, the array is filled with blank elements. WARNING: don't try to "add" any element on a resized array...
Referenced by qM3C2Process::Compute(), define_ccPointCloud(), qHoughNormals::doAction(), cloudViewer::io::ReadTriangleMeshFromOBJ(), and cloudViewer::io::ReadTriangleMeshFromPLY().
| bool ccPointCloud::resizeTheRGBTable | ( | bool | fillWithWhite = false | ) |
Resizes the RGB colors array.
If possible, the colors array is resized to fit exactly the number of points in the cloud (effectively stored or reserved). If the new size is inferior to the actual one, the last elements will be deleted. Otherwise, the array is filled with zeros (default behavior) or "white" colors (is fillWithWhite). WARNING: don't try to "add" any element on a resized array...
| fillWithWhite | whether to fill new array elements with zeros (false) or white color (true) |
Referenced by ccCloudLayersHelper::ccCloudLayersHelper(), ccCropTool::Crop(), GrainsAsEllipsoids::exportResultsAsCloud(), ccColorFromScalarDlg::onApply(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::io::ReadPointCloudFromPLY(), cloudViewer::io::ReadPointCloudFromPTS(), cloudViewer::io::ReadTriangleMeshFromPLY(), cloudViewer::pipelines::color_map::SetGeometryColorAverage(), ccEntityAction::sfConvertToRandomRGB(), and GrainsAsEllipsoids::updateMeshAndLineSet().
|
inline |
Returns pointer on RGB colors table.
Definition at line 914 of file ecvPointCloud.h.
Referenced by ccCloudLayersHelper::ccCloudLayersHelper(), and ccCloudLayersHelper::~ccCloudLayersHelper().
|
overridevirtual |
Apply rotation to the geometry coordinates and normals. Given a rotation matrix , and center , a given point is transformed according to .
| R | A 3x3 rotation matrix |
| center | Rotation center that is used for the rotation. |
Reimplemented from ccHObject.
|
overridevirtual |
Apply scaling to the geometry coordinates. Given a scaling factor , and center , a given point is transformed according to .
| scale | The scale parameter that is multiplied to the points/vertices of the geometry. |
| center | Scale center that is used to resize the geometry. |
Reimplemented from ccHObject.
|
overridevirtual |
Multiplies all coordinates by constant factors (one per dimension)
WARNING: attached octree may be deleted.
| fx | multiplication factor along the X dimension |
| fy | multiplication factor along the Y dimension |
| fz | multiplication factor along the Z dimension |
| center | scaling center (0,0,0) by default |
Implements ccGenericPointCloud.
Referenced by getMortarMaps().
| std::tuple<Eigen::Vector4d, std::vector<size_t> > ccPointCloud::SegmentPlane | ( | const double | distance_threshold = 0.01, |
| const int | ransac_n = 3, |
||
| const int | num_iterations = 100 |
||
| ) | const |
Segment ccPointCloud plane using the RANSAC algorithm.
| distance_threshold | Max distance a point can be from the plane model, and still be considered an inlier. |
| ransac_n | Number of initial points to be considered inliers in each iteration. |
| num_iterations | Number of iterations. |
Referenced by cloudViewer::geometry::pybind_pointcloud(), and ccEntityAction::RansacSegmentation().
| std::shared_ptr<ccPointCloud> ccPointCloud::SelectByIndex | ( | const std::vector< size_t > & | indices, |
| bool | invert = false |
||
| ) | const |
Function to select points from input ccPointCloud into output ccPointCloud.
Points with indices in
| indices | are selected. |
| indices | Indices of points to be selected. |
| invert | Set to True to invert the selection of indices. |
Referenced by convert(), cloudViewer::t::geometry::LegacySelectByIndex(), and cloudViewer::geometry::pybind_pointcloud().
| bool ccPointCloud::setCoordFromSF | ( | bool | importDims[3], |
| cloudViewer::ScalarField * | sf, | ||
| PointCoordinateType | defaultValueForNaN | ||
| ) |
Sets coordinate(s) from a scalar field.
Referenced by ccEntityAction::sfSetAsCoord().
| void ccPointCloud::setCurrentDisplayedScalarField | ( | int | index | ) |
Sets the currently displayed scalar field.
Warning: this scalar field will automatically be set as the OUTPUT one!
Referenced by ccRasterizeTool::activeLayerChanged(), LasCloudChunk::addLasFieldsToCloud(), ccScalarFieldArithmeticsDlg::Apply(), ccComparisonDlg::applyAndExit(), ccLibAlgorithms::ApplyCCLibAlgorithm(), ccComparisonDlg::cancelAndExit(), ccColorFromScalarDlg::ccColorFromScalarDlg(), masc::Classifier::classify(), qCanupoProcess::Classify(), qM3C2Process::Compute(), qVoxFallProcess::Compute(), ccComparisonDlg::computeApproxDistances(), ccComparisonDlg::computeDistances(), ccLibAlgorithms::ComputeGeomCharacteristic(), DistanceMapGenerationTool::ComputeRadialDist(), ccVolumeCalcTool::convertGridToCloud(), ccVolumeCalcTool::ConvertGridToCloud(), ccRasterizeTool::convertGridToCloud(), DistanceMapGenerationTool::ConvertMapToCloud(), ccEntityAction::convertNormalsTo(), ccMeasurementDevice::createScalarFieldForCloud(), ccCropTool::Crop(), define_ccPointCloud(), qPCV::doAction(), qPoissonRecon::doAction(), ccCompass::estimateStructureNormals(), masc::Classifier::evaluate(), qFacets::extractFacets(), TreeIso::Final_seg_pcd(), ccRasterizeTool::generateHillshade(), getMortarMaps(), ccEntityAction::importToSF(), TreeIso::Init_seg_pcd(), TreeIso::Intermediate_seg_pcd(), ccEntityAction::interpolateSFs(), ccCloudLayersHelper::keepCurrentSFVisible(), LoadCloud(), LASFWFFilter::loadFile(), RDBFilter::loadFile(), LoadScan(), CommandSFConvertToRGB::process(), CommandStatTest::process(), CommandICP::process(), CommandRasterize::process(), PCVCommand::Process(), cloudViewer::geometry::pybind_pointcloud(), CommandRemoveSF::removeSF(), ccEntityAction::rgbGaussianFilter(), ccEntityAction::sfAddIdField(), ccEntityAction::sfGaussianFilter(), and ccEntityAction::statisticalTest().
| void ccPointCloud::setEigenColor | ( | size_t | index, |
| const Eigen::Vector3d & | color | ||
| ) |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| void ccPointCloud::setEigenColors | ( | const std::vector< Eigen::Vector3d > & | colors | ) |
| void ccPointCloud::setEigenNormal | ( | size_t | index, |
| const Eigen::Vector3d & | normal | ||
| ) |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| void ccPointCloud::setEigenNormals | ( | const std::vector< Eigen::Vector3d > & | normals | ) |
| void ccPointCloud::setNormsTable | ( | NormsIndexesTableType * | norms | ) |
Sets the (compressed) normals table.
Referenced by qM3C2Process::Compute().
| void ccPointCloud::setPointColor | ( | size_t | pointIndex, |
| const ecvColor::Rgb & | col | ||
| ) |
Sets a particular point color.
WARNING: colors must be enabled.
Referenced by ccCloudLayersHelper::apply(), ComputeKmeansClustering(), ccCropTool::Crop(), GrainsAsEllipsoids::exportResultsAsCloud(), LASFWFFilter::loadFile(), LASFilter::loadFile(), ccCloudLayersHelper::mouseMove(), ccCloudLayersHelper::moveItem(), ccColorFromScalarDlg::onApply(), ccColorLevelsDlg::onApply(), cloudViewer::io::ReadPointCloudFromPTS(), ccCloudLayersHelper::restoreState(), ccCloudLayersHelper::setVisible(), ccEntityAction::sfConvertToRandomRGB(), and GrainsAsEllipsoids::updateMeshAndLineSet().
| void ccPointCloud::setPointColor | ( | size_t | pointIndex, |
| const ecvColor::Rgba & | col | ||
| ) |
| void ccPointCloud::setPointColor | ( | size_t | pointIndex, |
| const Eigen::Vector3d & | col | ||
| ) |
| void ccPointCloud::setPointNormal | ( | size_t | pointIndex, |
| const CCVector3 & | N | ||
| ) |
Sets a particular point normal (shortcut)
WARNING: normals must be enabled. Normal is automatically compressed before storage.
Referenced by ComputeM3C2DistForPoint(), define_ccPointCloud(), qHoughNormals::doAction(), ccCompass::estimateStructureNormals(), and cloudViewer::io::ReadTriangleMeshFromOBJ().
| void ccPointCloud::setPointNormalIndex | ( | size_t | pointIndex, |
| CompressedNormType | norm | ||
| ) |
Sets a particular point compressed normal.
WARNING: normals must be enabled.
Referenced by qM3C2Process::Compute().
| void ccPointCloud::setPointNormals | ( | const std::vector< CCVector3 > & | normals | ) |
|
inline |
Set a unique color for the whole cloud (shortcut)
Color array is automatically allocated if necessary.
| r | red component |
| g | green component |
| b | blue component |
Definition at line 778 of file ecvPointCloud.h.
Referenced by ccCloudLayersHelper::apply(), ExtractSIFT::compute(), GeneralFilters::compute(), ProjectionFilter::compute(), CorrespondenceMatching::compute(), TemplateAlignment::compute(), and ccEntityAction::setColor().
| bool ccPointCloud::setRGBColor | ( | const ecvColor::Rgb & | col | ) |
Set a unique color for the whole cloud.
Color array is automatically allocated if necessary.
| col | RGB color (size: 3) |
| bool ccPointCloud::setRGBColorByBanding | ( | unsigned char | dim, |
| double | freq | ||
| ) |
Assigns color to points by 'banding'.
Banding is performed along the specified dimension Color array is automatically allocated if necessary.
| dim | banding dimension (0:X, 1:Y, 2:Z) |
| freq | banding frequency |
Referenced by CommandColorBanding::process(), cloudViewer::geometry::pybind_pointcloud(), and ccEntityAction::setColorGradient().
| bool ccPointCloud::setRGBColorByHeight | ( | unsigned char | heightDim, |
| ccColorScale::Shared | colorScale | ||
| ) |
Assigns color to points proportionnaly to their 'height'.
Height is defined wrt to the specified dimension (heightDim). Color array is automatically allocated if necessary.
| heightDim | ramp dimension (0:X, 1:Y, 2:Z) |
| colorScale | color scale to use |
Referenced by ccEntityAction::setColorGradient().
| bool ccPointCloud::setRGBColorWithCurrentScalarField | ( | bool | mixWithExistingColor = false | ) |
Sets RGB colors with current scalar field (values & parameters)
Referenced by cloudViewer::geometry::pybind_pointcloud(), and ccEntityAction::sfConvertToRGB().
| bool ccPointCloud::sfColorScaleShown | ( | ) | const |
Returns whether color scale should be displayed or not.
Referenced by define_ccPointCloud(), ccPropertiesTreeDelegate::fillSFWithPointCloud(), and cloudViewer::geometry::pybind_pointcloud().
| void ccPointCloud::showSFColorsScale | ( | bool | state | ) |
Sets whether color scale should be displayed or not.
Referenced by ccVolumeCalcTool::convertGridToCloud(), ccVolumeCalcTool::ConvertGridToCloud(), ccMeasurementDevice::createScalarFieldForCloud(), define_ccPointCloud(), and cloudViewer::geometry::pybind_pointcloud().
|
inline |
Removes unused capacity.
Definition at line 357 of file ecvPointCloud.h.
References size.
Referenced by define_ccPointCloud(), ccCompass::estimateStructureNormals(), cloudViewer::pipelines::integration::ScalableTSDFVolume::ExtractTriangleMesh(), cloudViewer::pipelines::integration::UniformTSDFVolume::ExtractTriangleMesh(), STEPFilter::importStepFile(), SalomeHydroFilter::loadFile(), DRCFilter::loadFile(), DistanceMapGenerationDlg::loadOverlaySymbols(), main(), cloudViewer::geometry::pybind_pointcloud(), and cloudViewer::io::ReadModelUsingAssimp().
|
overrideprotectedvirtual |
Reimplemented from cloudViewer::PointCloudTpl< ccGenericPointCloud >.
|
overridevirtual |
Returns a given point visibility state (relatively to a sensor for instance) Generic method to request a point visibility (should be overloaded if this functionality is required). The point visibility is such as defined in Daniel Girardeau-Montaut's PhD manuscript (see Chapter 2, section 2-3-3). In this case, a ground based laser sensor model should be used to determine it. This method is called before performing any point-to-cloud comparison. If the result is not POINT_VISIBLE, then the comparison won't be performed and the scalar field value associated to this point will be this visibility value.
| P | the 3D point to test |
Reimplemented from cloudViewer::GenericCloud.
|
overrideprotectedvirtual |
Save own object data.
Called by 'toFile' (recursive scheme) To be overloaded (but still called ;) by subclass.
| out | output file |
| dataVersion | target file version for compatibility control |
Reimplemented from ccGenericPointCloud.
|
overridevirtual |
Apply transformation (4x4 matrix) to the geometry coordinates.
Reimplemented from ccHObject.
Referenced by cloudViewer::pipelines::registration::EvaluateRegistration(), cloudViewer::pipelines::registration::GetInformationMatrixFromPointClouds(), cloudViewer::t::geometry::LegacyTransform(), cloudViewer::pipelines::registration::OptimizePairwiseRegistration(), cloudViewer::pipelines::registration::RegistrationICP(), and cloudViewer::pipelines::registration::RegistrationRANSACBasedOnCorrespondence().
|
inline |
Definition at line 979 of file ecvPointCloud.h.
References Vector3Tpl< double >::fromArray().
|
overridevirtual |
Apply translation to the geometry coordinates.
| translation | A 3D vector to transform the geometry. |
| relative | If true, the translation is directly applied to the geometry. Otherwise, the geometry center is moved to the translation. |
Reimplemented from ccHObject.
Referenced by getMortarMaps().
| ccMesh* ccPointCloud::triangulateGrid | ( | const Grid & | grid, |
| double | minTriangleAngle_deg = 0.0 |
||
| ) | const |
Meshes a scan grid.
| void ccPointCloud::unalloactePoints | ( | ) |
Erases the cloud points.
Prefer ccPointCloud::clear by default.
Referenced by cloudViewer::geometry::pybind_pointcloud().
| void ccPointCloud::unallocateColors | ( | ) |
Erases the cloud colors.
Referenced by ccCropTool::Crop(), qPoissonRecon::doAction(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::pipelines::color_map::SetGeometryColorAverage(), ecvPoissonReconDlg::start(), and ccCloudLayersHelper::~ccCloudLayersHelper().
| void ccPointCloud::unallocateNorms | ( | ) |
Erases the cloud normals.
Referenced by NormalEstimation::compute(), CommandClearNormals::process(), cloudViewer::geometry::pybind_pointcloud(), and cloudViewer::io::ReadTriangleMeshFromOBJ().
| std::shared_ptr<ccPointCloud> ccPointCloud::UniformDownSample | ( | size_t | every_k_points | ) | const |
Function to downsample input ccPointCloud into output ccPointCloud uniformly.
The sample is performed in the order of the points with the 0-th point always chosen, not at random.
| every_k_points | Sample rate, the selected point indices are [0, k, 2k]. |
Referenced by convert(), and cloudViewer::geometry::pybind_pointcloud().
| ccPointCloud* ccPointCloud::unroll | ( | UnrollMode | mode, |
| UnrollBaseParams * | params, | ||
| bool | exportDeviationSF = false, |
||
| double | startAngle_deg = 0.0, |
||
| double | stopAngle_deg = 360.0, |
||
| cloudViewer::GenericProgressCallback * | progressCb = nullptr |
||
| ) | const |
Unrolls the cloud and its normals on a cylinder or a cone.
This method is redundant with the "developCloudOnCylinder" method of CCLib, apart that it can also handle the cloud normals.
| mode | unrolling mode |
| params | unrolling parameters (must match the unrolling mode) |
| exportDeviationSF | to export the deviation fro the ideal cone as a scalar field |
| startAngle_deg | start angle (in degrees) - 0 corresponds to +X (east) |
| stopAngle_deg | stop angle (in degrees) |
| progressCb | for progress notification |
| std::shared_ptr<ccPointCloud> ccPointCloud::VoxelDownSample | ( | double | voxel_size | ) |
Function to downsample input ccPointCloud into output ccPointCloud with a voxel.
Normals and colors are averaged if they exist.
| voxel_size | Defines the resolution of the voxel grid, smaller value leads to denser output point cloud. |
Referenced by convert(), cloudViewer::visualization::VisualizerWithEditing::KeyPressCallback(), cloudViewer::t::geometry::LegacyEstimateNormals(), cloudViewer::t::geometry::LegacyRemoveRadiusOutliers(), cloudViewer::t::geometry::LegacyRemoveStatisticalOutliers(), cloudViewer::pipelines::registration::LoadPointCloud(), and cloudViewer::geometry::pybind_pointcloud().
| std::tuple<std::shared_ptr<ccPointCloud>, Eigen::MatrixXi, std::vector<std::vector<int> > > ccPointCloud::VoxelDownSampleAndTrace | ( | double | voxel_size, |
| const Eigen::Vector3d & | min_bound, | ||
| const Eigen::Vector3d & | max_bound, | ||
| bool | approximate_class = false |
||
| ) | const |
Function to downsample using geometry.ccPointCloud.VoxelDownSample.
Also records point cloud index before downsampling.
| voxel_size | Voxel size to downsample into. |
| min_bound | Minimum coordinate of voxel boundaries |
| max_bound | Maximum coordinate of voxel boundaries |
| approximate_class | Whether to approximate. |
Referenced by cloudViewer::geometry::pybind_pointcloud().
| ccWaveformProxy ccPointCloud::waveformProxy | ( | unsigned | index | ) | const |
Returns a proxy on a given waveform.
Referenced by ccWaveWidget::init(), ccWaveDialog::onExportWaveAsCSV(), and LASFWFFilter::saveToFile().
|
inline |
Gives access to the associated FWF data.
Definition at line 515 of file ecvPointCloud.h.
Referenced by ccPropertiesTreeDelegate::fillWithPointCloud(), LasWaveformSaver::handlePoint(), LasWaveformLoader::LasWaveformLoader(), LASFWFFilter::loadFile(), LasWaveformLoader::loadWaveform(), and ccWaveDialog::onExportWaveAsCSV().
|
inline |
Gives access to the associated FWF data (const version)
Definition at line 517 of file ecvPointCloud.h.
| std::vector<Eigen::Matrix3d> ccPointCloud::covariances_ |
Covariance Matrix for each point.
Definition at line 1316 of file ecvPointCloud.h.
Referenced by cloudViewer::pipelines::registration::TransformationEstimationForGeneralizedICP::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationForGeneralizedICP::ComputeTransformation(), and cloudViewer::geometry::pybind_pointcloud().
|
protected |
Currently displayed scalar field.
Definition at line 1348 of file ecvPointCloud.h.
Referenced by ccSNECloud::drawMeOnly().
|
protected |
Currently displayed scalar field index.
Definition at line 1350 of file ecvPointCloud.h.
|
protected |
Waveforms raw data storage.
Definition at line 1439 of file ecvPointCloud.h.
|
protected |
General waveform descriptors.
Definition at line 1433 of file ecvPointCloud.h.
|
protected |
Per-point waveform accessors.
Definition at line 1436 of file ecvPointCloud.h.
|
protected |
Associated grid structure.
Definition at line 1353 of file ecvPointCloud.h.
|
protected |
L.O.D. structure.
Definition at line 1429 of file ecvPointCloud.h.
|
protected |
Normals (compressed)
Definition at line 1341 of file ecvPointCloud.h.
|
protected |
Colors.
Definition at line 1338 of file ecvPointCloud.h.
|
protected |
Specifies whether current scalar field color scale should be displayed or not
Definition at line 1345 of file ecvPointCloud.h.
|
protected |
Set of VBOs attached to this cloud.
Definition at line 1416 of file ecvPointCloud.h.
|
protected |
Whether visibility check is available or not (during comparison)
See ccPointCloud::testVisibility
Definition at line 1358 of file ecvPointCloud.h.