|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <ccSNECloud.h>
Public Member Functions | |
| ccSNECloud () | |
| ccSNECloud (ccPointCloud *obj) | |
| void | updateMetadata () |
 Public Member Functions inherited from ccPointCloud Public Member Functions inherited from ccPointCloud | |
| ccPointCloud (QString name=QString()) throw () | |
| Default constructor. More... | |
| ccPointCloud (const ccPointCloud &cloud) | |
| ccPointCloud (const std::vector< Eigen::Vector3d > &points, const std::string &name="cloud") | |
| ~ccPointCloud () override | |
| Default destructor. More... | |
| CV_CLASS_ENUM | getClassID () const override |
| Returns class ID. More... | |
| ccPointCloud * | partialClone (const cloudViewer::ReferenceCloud *selection, int *warnings=nullptr, bool withChildEntities=true) const |
| Creates a new point cloud object from a ReferenceCloud (selection) More... | |
| ccPointCloud * | cloneThis (ccPointCloud *destCloud=nullptr, bool ignoreChildren=false) |
| Clones this entity. More... | |
| ccGenericPointCloud * | clone (ccGenericPointCloud *destCloud=nullptr, bool ignoreChildren=false) override |
| Clones this entity. More... | |
| ccPointCloud & | operator= (const ccPointCloud &cloud) |
| Fuses another 3D entity with this one. More... | |
| const ccPointCloud & | operator+= (const ccPointCloud &cloud) |
| const ccPointCloud & | operator+= (ccPointCloud *) |
| ccPointCloud | operator+ (const ccPointCloud &cloud) const |
| void | clear () override |
| Clears the entity from all its points and features. More... | |
| void | unalloactePoints () |
| Erases the cloud points. More... | |
| void | unallocateColors () |
| Erases the cloud colors. More... | |
| void | unallocateNorms () |
| Erases the cloud normals. More... | |
| void | colorsHaveChanged () |
| void | normalsHaveChanged () |
| Notify a modification of normals display parameters or contents. More... | |
| void | pointsHaveChanged () |
| Notify a modification of points display parameters or contents. More... | |
| bool | reserve (unsigned numberOfPoints) override |
| Reserves memory for all the active features. More... | |
| bool | reserveThePointsTable (unsigned _numberOfPoints) |
| Reserves memory to store the points coordinates. More... | |
| bool | reserveTheRGBTable () |
| Reserves memory to store the RGB colors. More... | |
| bool | reserveTheNormsTable () |
| Reserves memory to store the compressed normals. More... | |
| bool | resize (unsigned numberOfPoints) override |
| Resizes all the active features arrays. More... | |
| bool | resizeTheRGBTable (bool fillWithWhite=false) |
| Resizes the RGB colors array. More... | |
| bool | resizeTheNormsTable () |
| Resizes the compressed normals array. More... | |
| void | shrinkToFit () |
| Removes unused capacity. More... | |
| ccScalarField * | getCurrentDisplayedScalarField () const |
| Returns the currently displayed scalar (or 0 if none) More... | |
| int | getCurrentDisplayedScalarFieldIndex () const |
| Returns the currently displayed scalar field index (or -1 if none) More... | |
| void | setCurrentDisplayedScalarField (int index) |
| Sets the currently displayed scalar field. More... | |
| void | deleteScalarField (int index) override |
| Deletes a specific scalar field. More... | |
| void | deleteAllScalarFields () override |
| Deletes all scalar fields associated to this cloud. More... | |
| int | addScalarField (const char *uniqueName) override |
| Creates a new scalar field and registers it. More... | |
| bool | sfColorScaleShown () const |
| Returns whether color scale should be displayed or not. More... | |
| void | showSFColorsScale (bool state) |
| Sets whether color scale should be displayed or not. More... | |
| size_t | gridCount () const |
| Returns the number of associated grids. More... | |
| Grid::Shared & | grid (size_t gridIndex) |
| Returns an associated grid. More... | |
| const Grid::Shared & | grid (size_t gridIndex) const |
| Returns an associated grid (const verson) More... | |
| bool | addGrid (Grid::Shared grid) |
| Adds an associated grid. More... | |
| void | removeGrids () |
| Remove all associated grids. More... | |
| ccMesh * | triangulateGrid (const Grid &grid, double minTriangleAngle_deg=0.0) const |
| Meshes a scan grid. More... | |
| bool | computeNormalsWithGrids (double minTriangleAngle_deg=1.0, ecvProgressDialog *pDlg=nullptr) |
| Compute the normals with the associated grid structure(s) More... | |
| bool | orientNormalsWithGrids (ecvProgressDialog *pDlg=nullptr) |
| Orient the normals with the associated grid structure(s) More... | |
| bool | orientNormalsTowardViewPoint (CCVector3 &VP, ecvProgressDialog *pDlg=nullptr) |
| Normals are forced to point to O. More... | |
| bool | computeNormalsWithOctree (CV_LOCAL_MODEL_TYPES model, ccNormalVectors::Orientation preferredOrientation, PointCoordinateType defaultRadius, ecvProgressDialog *pDlg=nullptr) |
| Compute the normals by approximating the local surface around each point. More... | |
| bool | orientNormalsWithMST (unsigned kNN=6, ecvProgressDialog *pDlg=nullptr) |
| Orient the normals with a Minimum Spanning Tree. More... | |
| bool | orientNormalsWithFM (unsigned char level, ecvProgressDialog *pDlg=nullptr) |
| Orient normals with Fast Marching. More... | |
| bool | hasFWF () const |
| Returns whether the cloud has associated Full WaveForm data. More... | |
| ccWaveformProxy | waveformProxy (unsigned index) const |
| Returns a proxy on a given waveform. More... | |
| FWFDescriptorSet & | fwfDescriptors () |
| Gives access to the FWF descriptors. More... | |
| const FWFDescriptorSet & | fwfDescriptors () const |
| Gives access to the FWF descriptors (const version) More... | |
| std::vector< ccWaveform > & | waveforms () |
| Gives access to the associated FWF data. More... | |
| const std::vector< ccWaveform > & | waveforms () const |
| Gives access to the associated FWF data (const version) More... | |
| bool | reserveTheFWFTable () |
| Reserves the FWF table. More... | |
| bool | resizeTheFWFTable () |
| Resizes the FWF table. More... | |
| SharedFWFDataContainer & | fwfData () |
| Gives access to the associated FWF data container. More... | |
| const SharedFWFDataContainer & | fwfData () const |
| Gives access to the associated FWF data container (const version) More... | |
| bool | compressFWFData () |
| Compresses the associated FWF data container. More... | |
| bool | computeFWFAmplitude (double &minVal, double &maxVal, ecvProgressDialog *pDlg=nullptr) const |
| Computes the maximum amplitude of all associated waveforms. More... | |
| void | clearFWFData () |
| Clears all associated FWF data. More... | |
| CCVector3 | computeGravityCenter () |
| Returns the cloud gravity center. More... | |
| void | invalidateBoundingBox () override |
| Invalidates bounding box. More... | |
| void | getDrawingParameters (glDrawParams ¶ms) const override |
| Returns main OpenGL parameters for this entity. More... | |
| unsigned | getUniqueIDForDisplay () const override |
| Returns object unqiue ID used for display. More... | |
| bool | hasColors () const override |
| Returns whether colors are enabled or not. More... | |
| bool | hasNormals () const override |
| Returns whether normals are enabled or not. More... | |
| bool | hasScalarFields () const override |
| Returns whether one or more scalar fields are instantiated. More... | |
| bool | hasDisplayedScalarField () const override |
| Returns whether an active scalar field is available or not. More... | |
| unsigned char | testVisibility (const CCVector3 &P) const override |
| bool | normalsAvailable () const override |
| Returns whether normals are available. More... | |
| const CCVector3 * | getNormal (unsigned pointIndex) const override |
| If per-point normals are available, returns the one at a specific index. More... | |
| const ecvColor::Rgb * | getScalarValueColor (ScalarType d) const override |
| Returns color corresponding to a given scalar value. More... | |
| const ecvColor::Rgb * | getPointScalarValueColor (unsigned pointIndex) const override |
| Returns color corresponding to a given point associated scalar value. More... | |
| ScalarType | getPointDisplayedDistance (unsigned pointIndex) const override |
| Returns scalar value associated to a given point. More... | |
| const ecvColor::Rgb & | getPointColor (unsigned pointIndex) const override |
| Returns color corresponding to a given point. More... | |
| const ColorsTableType & | getPointColors () const |
| ecvColor::Rgb & | getPointColorPtr (size_t pointIndex) |
| Eigen::Vector3d | getEigenColor (size_t index) const |
| std::vector< Eigen::Vector3d > | getEigenColors () const |
| void | setEigenColors (const std::vector< Eigen::Vector3d > &colors) |
| const CompressedNormType & | getPointNormalIndex (unsigned pointIndex) const override |
| Returns compressed normal corresponding to a given point. More... | |
| const CCVector3 & | getPointNormal (unsigned pointIndex) const override |
| Returns normal corresponding to a given point. More... | |
| CCVector3 & | getPointNormalPtr (size_t pointIndex) const |
| std::vector< CCVector3 > | getPointNormals () const |
| std::vector< CCVector3 * > | getPointNormalsPtr () const |
| void | setPointNormals (const std::vector< CCVector3 > &normals) |
| Eigen::Vector3d | getEigenNormal (size_t index) const |
| std::vector< Eigen::Vector3d > | getEigenNormals () const |
| void | setEigenNormals (const std::vector< Eigen::Vector3d > &normals) |
| cloudViewer::ReferenceCloud * | crop (const ccBBox &box, bool inside=true) override |
| Crops the cloud inside (or outside) a bounding box. More... | |
| cloudViewer::ReferenceCloud * | crop (const ecvOrientedBBox &bbox) override |
| virtual void | applyRigidTransformation (const ccGLMatrix &trans) override |
| Applies a rigid transformation (rotation + translation) More... | |
| virtual void | scale (PointCoordinateType fx, PointCoordinateType fy, PointCoordinateType fz, CCVector3 center=CCVector3(0, 0, 0)) override |
| Multiplies all coordinates by constant factors (one per dimension) More... | |
| void | refreshBB () override |
| Forces bounding-box update. More... | |
| ccGenericPointCloud * | createNewCloudFromVisibilitySelection (bool removeSelectedPoints=false, VisibilityTableType *visTable=nullptr, std::vector< int > *newIndexesOfRemainingPoints=nullptr, bool silent=false, cloudViewer::ReferenceCloud *selection=nullptr) override |
| bool | removeVisiblePoints (VisibilityTableType *visTable=nullptr, std::vector< int > *newIndexes=nullptr) override |
| Removes all the 'visible' points (as defined by the visibility array) More... | |
| void | enableVisibilityCheck (bool state) |
| bool | hasSensor () const |
| Returns whether the mesh as an associated sensor or not. More... | |
| QSharedPointer< cloudViewer::ReferenceCloud > | computeCPSet (ccGenericPointCloud &otherCloud, cloudViewer::GenericProgressCallback *progressCb=nullptr, unsigned char octreeLevel=0) |
| Computes the closest point of this cloud relatively to another cloud. More... | |
| bool | interpolateColorsFrom (ccGenericPointCloud *cloud, cloudViewer::GenericProgressCallback *progressCb=nullptr, unsigned char octreeLevel=0) |
| Interpolate colors from another cloud (nearest neighbor only) More... | |
| void | setPointColor (size_t pointIndex, const ecvColor::Rgb &col) |
| Sets a particular point color. More... | |
| void | setPointColor (size_t pointIndex, const ecvColor::Rgba &col) |
| void | setPointColor (size_t pointIndex, const Eigen::Vector3d &col) |
| void | setEigenColor (size_t index, const Eigen::Vector3d &color) |
| void | setPointNormalIndex (size_t pointIndex, CompressedNormType norm) |
| Sets a particular point compressed normal. More... | |
| void | setPointNormal (size_t pointIndex, const CCVector3 &N) |
| Sets a particular point normal (shortcut) More... | |
| void | setEigenNormal (size_t index, const Eigen::Vector3d &normal) |
| void | addNormIndex (CompressedNormType index) |
| Pushes a compressed normal vector. More... | |
| void | addNorm (const CCVector3 &N) |
| Pushes a normal vector on stack (shortcut) More... | |
| void | addEigenNorm (const Eigen::Vector3d &N) |
| void | addEigenNorms (const std::vector< Eigen::Vector3d > &normals) |
| void | addNorms (const std::vector< CCVector3 > &Ns) |
| void | addNorms (const std::vector< CompressedNormType > &idxes) |
| std::vector< CompressedNormType > | getNorms () const |
| void | getNorms (std::vector< CompressedNormType > &idxes) const |
| void | addNormAtIndex (const PointCoordinateType *N, unsigned index) |
| Adds a normal vector to the one at a specific index. More... | |
| void | setNormsTable (NormsIndexesTableType *norms) |
| Sets the (compressed) normals table. More... | |
| bool | convertNormalToRGB () |
| Converts normals to RGB colors. More... | |
| bool | convertNormalToDipDirSFs (ccScalarField *dipSF, ccScalarField *dipDirSF) |
| Converts normals to two scalar fields: 'dip' and 'dip direction'. More... | |
| void | addRGBColor (const ecvColor::Rgb &C) |
| Pushes an RGB color on stack. More... | |
| void | addRGBColors (const std::vector< ecvColor::Rgb > &colors) |
| void | addEigenColor (const Eigen::Vector3d &color) |
| void | addEigenColors (const std::vector< Eigen::Vector3d > &colors) |
| void | addRGBColor (ColorCompType r, ColorCompType g, ColorCompType b) |
| Pushes an RGB color on stack (shortcut) More... | |
| void | addGreyColor (ColorCompType g) |
| Pushes a grey color on stack (shortcut) More... | |
| bool | convertRGBToGreyScale () |
| Converts RGB to grey scale colors. More... | |
| bool | colorize (float r, float g, float b) |
| Multiplies all color components of all points by coefficients. More... | |
| bool | setRGBColorByHeight (unsigned char heightDim, ccColorScale::Shared colorScale) |
| Assigns color to points proportionnaly to their 'height'. More... | |
| bool | setRGBColorByBanding (unsigned char dim, double freq) |
| Assigns color to points by 'banding'. More... | |
| bool | convertCurrentScalarFieldToColors (bool mixWithExistingColor=false) |
| bool | setRGBColorWithCurrentScalarField (bool mixWithExistingColor=false) |
| Sets RGB colors with current scalar field (values & parameters) More... | |
| bool | setRGBColor (ColorCompType r, ColorCompType g, ColorCompType b) |
| Set a unique color for the whole cloud (shortcut) More... | |
| bool | setRGBColor (const ecvColor::Rgb &col) |
| Set a unique color for the whole cloud. More... | |
| bool | applyFilterToRGB (PointCoordinateType sigma, PointCoordinateType sigmaSF, RgbFilterOptions filterParams, cloudViewer::GenericProgressCallback *progressCb=nullptr) |
| Applies a spatial Gaussian filter on RGB colors. More... | |
| void | invertNormals () |
| Inverts normals (if any) More... | |
| ccPointCloud * | filterPointsByScalarValue (ScalarType minVal, ScalarType maxVal, bool outside=false) |
| Filters out points whose scalar values falls into an interval. More... | |
| ccPointCloud * | filterPointsByScalarValue (std::vector< ScalarType > values, bool outside=false) |
| Filters out points whose scalar values falls into an interval. More... | |
| void | hidePointsByScalarValue (ScalarType minVal, ScalarType maxVal) |
| Hides points whose scalar values falls into an interval. More... | |
| void | hidePointsByScalarValue (std::vector< ScalarType > values) |
| Hides points whose scalar values falls into an interval. More... | |
| ccPointCloud * | unroll (UnrollMode mode, UnrollBaseParams *params, bool exportDeviationSF=false, double startAngle_deg=0.0, double stopAngle_deg=360.0, cloudViewer::GenericProgressCallback *progressCb=nullptr) const |
| Unrolls the cloud and its normals on a cylinder or a cone. More... | |
| void | addColorRampInfo (CC_DRAW_CONTEXT &context) |
| Adds associated SF color ramp info to current GL context. More... | |
| int | addScalarField (ccScalarField *sf) |
| Adds an existing scalar field to this cloud. More... | |
| ColorsTableType * | rgbColors () const |
| Returns pointer on RGB colors table. More... | |
| NormsIndexesTableType * | normals () const |
| Returns pointer on compressed normals indexes table. More... | |
| cloudViewer::ReferenceCloud * | crop2D (const ccPolyline *poly, unsigned char orthoDim, bool inside=true) |
| Crops the cloud inside (or outside) a 2D polyline. More... | |
| const ccPointCloud & | append (ccPointCloud *cloud, unsigned pointCountBefore, bool ignoreChildren=false) |
| Appends a cloud to this one. More... | |
| bool | enhanceRGBWithIntensitySF (int sfIdx, bool useCustomIntensityRange=false, double minI=0.0, double maxI=1.0) |
| bool | exportCoordToSF (bool exportDims[3]) |
| Exports the specified coordinate dimension(s) to scalar field(s) More... | |
| bool | setCoordFromSF (bool importDims[3], cloudViewer::ScalarField *sf, PointCoordinateType defaultValueForNaN) |
| Sets coordinate(s) from a scalar field. More... | |
| bool | exportNormalToSF (bool exportDims[3]) |
| Exports the specified normal dimension(s) to scalar field(s) More... | |
| virtual bool | IsEmpty () const override |
| virtual Eigen::Vector3d | GetMinBound () const override |
| Returns min bounds for geometry coordinates. More... | |
| virtual Eigen::Vector3d | GetMaxBound () const override |
| Returns max bounds for geometry coordinates. More... | |
| virtual Eigen::Vector3d | GetCenter () const override |
| Returns the center of the geometry coordinates. More... | |
| virtual ccBBox | GetAxisAlignedBoundingBox () const override |
| Returns an axis-aligned bounding box of the geometry. More... | |
| virtual ecvOrientedBBox | GetOrientedBoundingBox () const override |
| virtual ccPointCloud & | Transform (const Eigen::Matrix4d &trans) override |
| Apply transformation (4x4 matrix) to the geometry coordinates. More... | |
| virtual ccPointCloud & | Translate (const Eigen::Vector3d &translation, bool relative=true) override |
| Apply translation to the geometry coordinates. More... | |
| ccPointCloud & | Translate (const CCVector3 &T) |
| virtual ccPointCloud & | Scale (const double s, const Eigen::Vector3d ¢er) override |
Apply scaling to the geometry coordinates. Given a scaling factor  , and center , and center  , a given point , a given point  is transformed according to is transformed according to  . More... . More... | |
| virtual ccPointCloud & | Rotate (const Eigen::Matrix3d &R, const Eigen::Vector3d ¢er) override |
Apply rotation to the geometry coordinates and normals. Given a rotation matrix  , and center , a given point is transformed according to , and center , a given point is transformed according to  . More... . More... | |
| bool | HasCovariances () const |
| Returns 'true' if the point cloud contains per-point covariance matrix. More... | |
| ccPointCloud & | NormalizeNormals () |
| Normalize point normals to length 1.`. More... | |
| std::shared_ptr< ccPointCloud > | SelectByIndex (const std::vector< size_t > &indices, bool invert=false) const |
Function to select points from input ccPointCloud into output ccPointCloud. More... | |
| ccPointCloud & | RemoveNonFinitePoints (bool remove_nan=true, bool remove_infinite=true) |
| Remove all points fromt he point cloud that have a nan entry, or infinite entries. More... | |
| std::shared_ptr< ccPointCloud > | VoxelDownSample (double voxel_size) |
| Function to downsample input ccPointCloud into output ccPointCloud with a voxel. More... | |
| std::tuple< std::shared_ptr< ccPointCloud >, Eigen::MatrixXi, std::vector< std::vector< int > > > | VoxelDownSampleAndTrace (double voxel_size, const Eigen::Vector3d &min_bound, const Eigen::Vector3d &max_bound, bool approximate_class=false) const |
| Function to downsample using geometry.ccPointCloud.VoxelDownSample. More... | |
| std::shared_ptr< ccPointCloud > | UniformDownSample (size_t every_k_points) const |
| Function to downsample input ccPointCloud into output ccPointCloud uniformly. More... | |
| std::shared_ptr< ccPointCloud > | RandomDownSample (double sampling_ratio) const |
| Function to downsample input pointcloud into output pointcloud randomly. More... | |
| std::shared_ptr< ccPointCloud > | FarthestPointDownSample (const size_t num_samples, const size_t start_index=0) const |
| Function to downsample input pointcloud into output pointcloud with a set of points has farthest distance. More... | |
| std::shared_ptr< ccPointCloud > | Crop (const ccBBox &bbox) const |
| Function to crop ccPointCloud into output ccPointCloud. More... | |
| std::shared_ptr< ccPointCloud > | Crop (const ecvOrientedBBox &bbox) const |
| Function to crop ccPointCloud into output ccPointCloud. More... | |
| std::tuple< std::shared_ptr< ccPointCloud >, std::vector< size_t > > | RemoveRadiusOutliers (size_t nb_points, double search_radius) const |
Function to remove points that have less than nb_points in a sphere of a given radius. More... | |
| std::tuple< std::shared_ptr< ccPointCloud >, std::vector< size_t > > | RemoveStatisticalOutliers (size_t nb_neighbors, double std_ratio) const |
Function to remove points that are further away from their nb_neighbor neighbors in average. More... | |
| bool | EstimateNormals (const cloudViewer::geometry::KDTreeSearchParam &search_param=cloudViewer::geometry::KDTreeSearchParamKNN(), bool fast_normal_computation=true) |
| Function to compute the normals of a point cloud. More... | |
| bool | OrientNormalsToAlignWithDirection (const Eigen::Vector3d &orientation_reference=Eigen::Vector3d(0.0, 0.0, 1.0)) |
| Function to orient the normals of a point cloud. More... | |
| bool | OrientNormalsTowardsCameraLocation (const Eigen::Vector3d &camera_location=Eigen::Vector3d::Zero()) |
| Function to orient the normals of a point cloud. More... | |
| void | OrientNormalsConsistentTangentPlane (size_t k) |
| Function to consistently orient estimated normals based on consistent tangent planes as described in Hoppe et al., "Surface
Reconstruction from Unorganized Points", 1992. More... | |
| std::vector< double > | ComputePointCloudDistance (const ccPointCloud &target) |
| Function to compute the point to point distances between point clouds. More... | |
| void | EstimateCovariances (const cloudViewer::geometry::KDTreeSearchParam &search_param=cloudViewer::geometry::KDTreeSearchParamKNN()) |
| Function to compute the covariance matrix for each point of a point cloud. More... | |
| std::vector< double > | ComputeMahalanobisDistance () const |
| Function to compute the Mahalanobis distance for points in an input point cloud. More... | |
| std::vector< double > | ComputeNearestNeighborDistance () const |
| double | ComputeResolution () const |
| std::tuple< std::shared_ptr< ccMesh >, std::vector< size_t > > | ComputeConvexHull () const |
| Function that computes the convex hull of the point cloud using qhull. More... | |
| std::tuple< std::shared_ptr< ccMesh >, std::vector< size_t > > | HiddenPointRemoval (const Eigen::Vector3d &camera_location, const double radius) const |
| This is an implementation of the Hidden Point Removal operator described in Katz et. al. 'Direct Visibility of Point Sets', 2007. More... | |
| std::vector< int > | ClusterDBSCAN (double eps, size_t min_points, bool print_progress=false) const |
| Cluster ccPointCloud using the DBSCAN algorithm Ester et al., "A Density-Based Algorithm for Discovering Clusters
in Large Spatial Databases with Noise", 1996. More... | |
| std::tuple< Eigen::Vector4d, std::vector< size_t > > | SegmentPlane (const double distance_threshold=0.01, const int ransac_n=3, const int num_iterations=100) const |
| Segment ccPointCloud plane using the RANSAC algorithm. More... | |
| std::shared_ptr< ccPointCloud > | CreateFromVoxelGrid (const cloudViewer::geometry::VoxelGrid &voxel_grid) |
| Function to create a PointCloud from a VoxelGrid. More... | |
| ccPointCloud & | PaintUniformColor (const Eigen::Vector3d &color) |
| Assigns each vertex in the ccMesh the same color. More... | |
| bool | initLOD () |
| Intializes the LOD structure. More... | |
| void | clearLOD () |
| Clears the LOD structure. More... | |
| Public Member Functions inherited from cloudViewer::PointCloudTpl< ccGenericPointCloud > | |
| PointCloudTpl () | |
| Default constructor. More... | |
| virtual | ~PointCloudTpl () |
| Default destructor. More... | |
| unsigned | size () const override |
| void | forEach (GenericCloud::genericPointAction action) override |
| void | getBoundingBox (CCVector3 &bbMin, CCVector3 &bbMax) override |
| void | placeIteratorAtBeginning () override |
| const CCVector3 * | getNextPoint () override |
| bool | enableScalarField () override |
| bool | isScalarFieldEnabled () const override |
| void | setPointScalarValue (unsigned pointIndex, ScalarType value) override |
| ScalarType | getPointScalarValue (unsigned pointIndex) const override |
| const CCVector3 * | getPoint (unsigned index) const override |
| void | getPoint (unsigned index, CCVector3 &P) const override |
| void | getPoint (unsigned index, double P[3]) const override |
| CCVector3 * | getPointPtr (size_t index) |
| std::vector< CCVector3 > & | getPoints () |
| const std::vector< CCVector3 > & | getPoints () const |
| const CCVector3 * | getPointPersistentPtr (unsigned index) override |
| const CCVector3 * | getPointPersistentPtr (unsigned index) const |
| void | reset () |
| Clears the cloud database. More... | |
| void | addPoint (const CCVector3 &P) |
| Adds a 3D point to the database. More... | |
| void | addPoint (double x, double y, double z) |
| void | addPoint (double xyz[3]) |
| void | setPoint (size_t index, const CCVector3 &P) |
| void | setEigenPoint (size_t index, const Eigen::Vector3d &point) |
| void | addEigenPoint (const Eigen::Vector3d &point) |
| void | addPoints (const std::vector< CCVector3 > &points) |
| void | addPoints (const std::vector< Eigen::Vector3d > &points) |
| Eigen::Vector3d | getEigenPoint (size_t index) const |
| std::vector< Eigen::Vector3d > | getEigenPoints () const |
| void | setEigenPoints (const std::vector< Eigen::Vector3d > &points) |
| unsigned | getNumberOfScalarFields () const |
| Returns the number of associated (and active) scalar fields. More... | |
| ScalarField * | getScalarField (int index) const |
| Returns a pointer to a specific scalar field. More... | |
| const char * | getScalarFieldName (int index) const |
| Returns the name of a specific scalar field. More... | |
| int | getScalarFieldIndexByName (const char *name) const |
| Returns the index of a scalar field represented by its name. More... | |
| ScalarField * | getCurrentInScalarField () const |
| Returns the scalar field currently associated to the cloud input. More... | |
| ScalarField * | getCurrentOutScalarField () const |
| Returns the scalar field currently associated to the cloud output. More... | |
| void | setCurrentInScalarField (int index) |
| Sets the INPUT scalar field. More... | |
| int | getCurrentInScalarFieldIndex () |
| Returns current INPUT scalar field index (or -1 if none) More... | |
| void | setCurrentOutScalarField (int index) |
| Sets the OUTPUT scalar field. More... | |
| int | getCurrentOutScalarFieldIndex () |
| Returns current OUTPUT scalar field index (or -1 if none) More... | |
| void | setCurrentScalarField (int index) |
| Sets both the INPUT & OUTPUT scalar field. More... | |
| bool | renameScalarField (int index, const char *newName) |
| Renames a specific scalar field. More... | |
| unsigned | capacity () const |
| Returns cloud capacity (i.e. reserved size) More... | |
| Public Member Functions inherited from ccGenericPointCloud | |
| ccGenericPointCloud (QString name=QString()) | |
| Default constructor. More... | |
| ccGenericPointCloud (const ccGenericPointCloud &cloud) | |
| Copy constructor. More... | |
| ~ccGenericPointCloud () override | |
| Default destructor. More... | |
| virtual ccOctree::Shared | computeOctree (cloudViewer::GenericProgressCallback *progressCb=nullptr, bool autoAddChild=true) |
| Computes the cloud octree. More... | |
| virtual ccOctree::Shared | getOctree () const |
| Returns the associated octree (if any) More... | |
| virtual void | setOctree (ccOctree::Shared octree, bool autoAddChild=true) |
| Sets the associated octree. More... | |
| virtual ccOctreeProxy * | getOctreeProxy () const |
| Returns the associated octree proxy (if any) More... | |
| virtual void | deleteOctree () |
| Erases the octree. More... | |
| virtual VisibilityTableType & | getTheVisibilityArray () |
| Returns associated visibility array. More... | |
| virtual const VisibilityTableType & | getTheVisibilityArray () const |
| Returns associated visibility array (const version) More... | |
| virtual cloudViewer::ReferenceCloud * | getTheVisiblePoints (const VisibilityTableType *visTable=nullptr, bool silent=false, cloudViewer::ReferenceCloud *selection=nullptr) const |
| Returns a ReferenceCloud equivalent to the visibility array. More... | |
| virtual bool | isVisibilityTableInstantiated () const |
| Returns whether the visibility array is allocated or not. More... | |
| virtual bool | resetVisibilityArray () |
| Resets the associated visibility array. More... | |
| virtual void | invertVisibilityArray () |
| Inverts the visibility array. More... | |
| virtual void | unallocateVisibilityArray () |
| Erases the points visibility information. More... | |
| ccBBox | getOwnBB (bool withGLFeatures=false) override |
| Returns the entity's own bounding-box. More... | |
| bool | isSerializable () const override |
| Returns whether object is serializable of not. More... | |
| void | setPointSize (unsigned size=0) |
| Sets point size. More... | |
| unsigned char | getPointSize () const |
| Returns current point size. More... | |
| void | importParametersFrom (const ccGenericPointCloud *cloud) |
| Imports the parameters from another cloud. More... | |
| bool | pointPicking (const CCVector2d &clickPos, const ccGLCameraParameters &camera, int &nearestPointIndex, double &nearestSquareDist, double pickWidth=2.0, double pickHeight=2.0, bool autoComputeOctree=false) |
| Point picking (brute force or octree-driven) More... | |
| std::tuple< Eigen::Vector3d, Eigen::Matrix3d > | computeMeanAndCovariance () const |
| cloudViewer::SquareMatrixd | computeCovariance () const |
| Public Member Functions inherited from ccShiftedObject | |
| ccShiftedObject (QString name=QString()) | |
| Default constructor. More... | |
| ccShiftedObject (const ccShiftedObject &s) | |
| Copy constructor. More... | |
| void | copyGlobalShiftAndScale (const ccShiftedObject &s) |
| Copies the Global Shift and Scale from another entity. More... | |
| virtual void | setGlobalShift (double x, double y, double z) |
| Sets shift applied to original coordinates (information storage only) More... | |
| virtual void | setGlobalShift (const CCVector3d &shift) |
| Sets shift applied to original coordinates (information storage only) More... | |
| virtual const CCVector3d & | getGlobalShift () const |
| Returns the shift applied to original coordinates. More... | |
| virtual void | setGlobalScale (double scale) |
| virtual double | getGlobalScale () const |
| Returns the scale applied to original coordinates. More... | |
| bool | isShifted () const |
| Returns whether the cloud is shifted or not. More... | |
| template<typename T > | |
| CCVector3d | toGlobal3d (const Vector3Tpl< T > &Plocal) const |
| Returns the point back-projected into the original coordinates system. More... | |
| template<typename T > | |
| CCVector3d | toLocal3d (const Vector3Tpl< T > &Pglobal) const |
| Returns the point projected into the local (shifted) coordinates system. More... | |
| template<typename T > | |
| CCVector3 | toLocal3pc (const Vector3Tpl< T > &Pglobal) const |
| Returns the point projected into the local (shifted) coordinates system. More... | |
| bool | getOwnGlobalBB (CCVector3d &minCorner, CCVector3d &maxCorner) override |
| GlobalBoundingBox | getOwnGlobalBB (bool withGLFeatures=false) override |
| Public Member Functions inherited from ccHObject | |
| ccHObject (QString name=QString()) | |
| Default constructor. More... | |
| ccHObject (const ccHObject &object) | |
| Copy constructor. More... | |
| virtual | ~ccHObject () override |
| Default destructor. More... | |
| virtual Eigen::Vector2d | GetMin2DBound () const |
| virtual Eigen::Vector2d | GetMax2DBound () const |
| virtual ccHObject & | Scale (const double s) |
| virtual ccHObject & | Rotate (const Eigen::Matrix3d &R) |
| QString | getViewId () const |
| bool | isGroup () const |
| Returns whether the instance is a group. More... | |
| ccHObject * | getParent () const |
| Returns parent object. More... | |
| virtual QIcon | getIcon () const |
| Returns the icon associated to this entity. More... | |
| void | addDependency (ccHObject *otherObject, int flags, bool additive=true) |
| Adds a new dependence (additive or not) More... | |
| int | getDependencyFlagsWith (const ccHObject *otherObject) |
| Returns the dependency flags with a given object. More... | |
| void | removeDependencyWith (ccHObject *otherObject) |
| Removes any dependency flags with a given object. More... | |
| void | removeDependencyFlag (ccHObject *otherObject, DEPENDENCY_FLAGS flag) |
| Removes a given dependency flag. More... | |
| virtual bool | addChild (ccHObject *child, int dependencyFlags=DP_PARENT_OF_OTHER, int insertIndex=-1) |
| Adds a child. More... | |
| unsigned | getChildrenNumber () const |
| Returns the number of children. More... | |
| unsigned int | getChildCountRecursive () const |
| Returns the total number of children under this object recursively. More... | |
| ccHObject * | getChild (unsigned childPos) const |
| Returns the ith child. More... | |
| ccHObject * | find (unsigned uniqueID) |
| Finds an entity in this object hierarchy. More... | |
| unsigned | filterChildren (Container &filteredChildren, bool recursive=false, CV_CLASS_ENUM filter=CV_TYPES::OBJECT, bool strict=false) const |
| Collects the children corresponding to a certain pattern. More... | |
| void | detachChild (ccHObject *child) |
| Detaches a specific child. More... | |
| void | detachAllChildren () |
| Removes a specific child. More... | |
| void | getTypeID_recursive (std::vector< removeInfo > &rmInfos, bool relative) |
| void | getTypeID_recursive (std::vector< hideInfo > &hdInfos, bool relative) |
| void | removeChild (ccHObject *child) |
| void | removeChild (int pos) |
| Removes a specific child given its index. More... | |
| void | removeAllChildren () |
| Removes all children. More... | |
| int | getChildIndex (const ccHObject *aChild) const |
| Returns child index. More... | |
| void | swapChildren (unsigned firstChildIndex, unsigned secondChildIndex) |
| Swaps two children. More... | |
| int | getIndex () const |
| Returns index relatively to its parent or -1 if no parent. More... | |
| void | transferChild (ccHObject *child, ccHObject &newParent) |
| Transfer a given child to another parent. More... | |
| void | transferChildren (ccHObject &newParent, bool forceFatherDependent=false) |
| Transfer all children to another parent. More... | |
| ccHObject * | getFirstChild () const |
| Shortcut: returns first child. More... | |
| ccHObject * | getLastChild () const |
| Shortcut: returns last child. More... | |
| bool | isAncestorOf (const ccHObject *anObject) const |
| Returns true if the current object is an ancestor of the specified one. More... | |
| void | removeFromRenderScreen (bool recursive=true) |
| void | hideObject_recursive (bool recursive) |
| void | hideBB (CC_DRAW_CONTEXT context) |
| void | showBB (CC_DRAW_CONTEXT context) |
| void | setRedrawFlagRecursive (bool redraw=false) |
| void | setForceRedrawRecursive (bool redraw=false) |
| void | setPointSizeRecursive (int pSize) |
| void | setLineWidthRecursive (PointCoordinateType width) |
| virtual ccBBox | getBB_recursive (bool withGLFeatures=false, bool onlyEnabledChildren=true) |
| Returns the bounding-box of this entity and it's children. More... | |
| virtual GlobalBoundingBox | getGlobalBB_recursive (bool withGLFeatures=false, bool onlyEnabledChildren=true) |
| Returns the global bounding-box of this entity and it's children. More... | |
| virtual ccBBox | getDisplayBB_recursive (bool relative) |
| Returns the bounding-box of this entity and it's children WHEN DISPLAYED. More... | |
| virtual ccBBox | getOwnFitBB (ccGLMatrix &trans) |
| Returns best-fit bounding-box (if available) More... | |
| virtual void | drawBB (CC_DRAW_CONTEXT &context, const ecvColor::Rgb &col) |
| Draws the entity (and its children) bounding-box. More... | |
| void | draw (CC_DRAW_CONTEXT &context) override |
| Draws entity and its children. More... | |
| void | updateNameIn3DRecursive () |
| void | setHideShowType (CC_DRAW_CONTEXT &context) |
| void | setRemoveType (CC_DRAW_CONTEXT &context) |
| ENTITY_TYPE | getEntityType () const |
| virtual void | redrawDisplay (bool forceRedraw=true, bool only2D=false) |
| Redraws associated display. More... | |
| bool | getAbsoluteGLTransformation (ccGLMatrix &trans) const |
| virtual bool | isDisplayed () const |
| Returns whether the object is actually displayed (visible) or not. More... | |
| virtual bool | isBranchEnabled () const |
| Returns whether the object and all its ancestors are enabled. More... | |
| virtual void | redrawDisplay_recursive (bool p) |
| virtual void | refreshDisplay_recursive (bool p) |
| virtual void | setSelected_recursive (bool p) |
| virtual void | toggleActivation_recursive () |
| virtual void | toggleVisibility_recursive () |
| virtual void | toggleColors_recursive () |
| virtual void | resetGLTransformationHistory_recursive () |
| virtual void | toggleNormals_recursive () |
| virtual void | toggleSF_recursive () |
| virtual void | toggleShowName_recursive () |
| unsigned | findMaxUniqueID_recursive () const |
| Returns the max 'unique ID' of this entity and its siblings. More... | |
| void | applyGLTransformation_recursive (const ccGLMatrix *trans=nullptr) |
| Applies the active OpenGL transformation to the entity (recursive) More... | |
| bool | isSerializable () const override |
| Returns whether object is serializable of not. More... | |
| bool | toFile (QFile &out, short dataVersion) const override |
| Saves data to binary stream. More... | |
| bool | fromFile (QFile &in, short dataVersion, int flags, LoadedIDMap &oldToNewIDMap) override |
| Loads data from binary stream. More... | |
| short | minimumFileVersion () const override |
| Returns the minimum file version required to save this instance. More... | |
| bool | fromFileNoChildren (QFile &in, short dataVersion, int flags, LoadedIDMap &oldToNewIDMap) |
| Custom version of ccSerializableObject::fromFile. More... | |
| virtual bool | isShareable () const |
| Returns whether object is shareable or not. More... | |
| virtual void | setSelectionBehavior (SelectionBehavior mode) |
| Sets selection behavior (when displayed) More... | |
| virtual SelectionBehavior | getSelectionBehavior () const |
| Returns selection behavior. More... | |
| virtual const ccGLMatrix & | getGLTransformationHistory () const |
| Returns the transformation 'history' matrix. More... | |
| virtual void | setGLTransformationHistory (const ccGLMatrix &mat) |
| Sets the transformation 'history' matrix (handle with care!) More... | |
| virtual void | resetGLTransformationHistory () |
| Resets the transformation 'history' matrix. More... | |
| bool | pushDisplayState () override |
| Pushes the current display state (overridden) More... | |
| void | popDisplayState (bool apply=true) override |
| Pops the last pushed display state (overridden) More... | |
| Public Member Functions inherited from ccObject | |
| ccObject (QString name=QString()) | |
| Default constructor. More... | |
| ccObject (const ccObject &object) | |
| Copy constructor. More... | |
| virtual QString | getName () const |
| Returns object name. More... | |
| virtual void | setName (const QString &name) |
| Sets object name. More... | |
| virtual void | setRemoveFlag (bool removeFlag) |
| Sets removeFlag. More... | |
| virtual bool | getRemoveFlag () |
| Returns removeFlag. More... | |
| virtual unsigned | getUniqueID () const |
| Returns object unique ID. More... | |
| virtual void | setUniqueID (unsigned ID) |
| Changes unique ID. More... | |
| virtual bool | isEnabled () const |
| Returns whether the object is enabled or not. More... | |
| virtual void | setEnabled (bool state) |
| Sets the "enabled" property. More... | |
| virtual void | toggleActivation () |
| Toggles the "enabled" property. More... | |
| virtual bool | isLocked () const |
| Returns whether the object is locked or not. More... | |
| virtual void | setLocked (bool state) |
| Sets the "enabled" property. More... | |
| bool | isLeaf () const |
| bool | isCustom () const |
| bool | isHierarchy () const |
| bool | isKindOf (CV_CLASS_ENUM type) const |
| bool | isA (CV_CLASS_ENUM type) const |
| QVariant | getMetaData (const QString &key) const |
| Returns a given associated meta data. More... | |
| bool | removeMetaData (const QString &key) |
| Removes a given associated meta-data. More... | |
| void | setMetaData (const QString &key, const QVariant &data) |
| Sets a meta-data element. More... | |
| void | setMetaData (const QVariantMap &dataset, bool overwrite=false) |
| Sets several meta-data elements at a time. More... | |
| bool | hasMetaData (const QString &key) const |
| Returns whether a meta-data element with the given key exists or not. More... | |
| const QVariantMap & | metaData () const |
| Returns meta-data map (const only) More... | |
| void | setBaseName (const QString &baseName) |
| QString | getBaseName () const |
| void | setFullPath (const QString &fullPaht) |
| QString | getFullPath () const |
| Public Member Functions inherited from ccSerializableObject | |
| virtual | ~ccSerializableObject ()=default |
| Destructor. More... | |
| Public Member Functions inherited from ccDrawableObject | |
| ccDrawableObject () | |
| Default constructor. More... | |
| ccDrawableObject (const ccDrawableObject &object) | |
| Copy constructor. More... | |
| virtual | ~ccDrawableObject ()=default |
| virtual bool | isVisible () const |
| Returns whether entity is visible or not. More... | |
| virtual void | setVisible (bool state) |
| Sets entity visibility. More... | |
| virtual void | toggleVisibility () |
| Toggles visibility. More... | |
| virtual bool | isRedraw () const |
| Returns whether entity is to be redraw. More... | |
| virtual void | setRedraw (bool state) |
| Sets entity redraw mode. More... | |
| virtual void | setForceRedraw (bool state) |
| Sets force redraw. More... | |
| virtual void | setFixedId (bool state) |
| virtual bool | isFixedId () |
| virtual bool | isVisibilityLocked () const |
| Returns whether visibility is locked or not. More... | |
| virtual void | lockVisibility (bool state) |
| Locks/unlocks visibility. More... | |
| virtual bool | isSelected () const |
| Returns whether entity is selected or not. More... | |
| virtual void | setSelected (bool state) |
| Selects/Unselects entity. More... | |
| virtual bool | colorsShown () const |
| Returns whether colors are shown or not. More... | |
| virtual void | showColors (bool state) |
| Sets colors visibility. More... | |
| virtual void | toggleColors () |
| Toggles colors display state. More... | |
| virtual bool | normalsShown () const |
| Returns whether normals are shown or not. More... | |
| virtual void | showNormals (bool state) |
| Sets normals visibility. More... | |
| virtual void | toggleNormals () |
| Toggles normals display state. More... | |
| virtual void | showSF (bool state) |
| Sets active scalarfield visibility. More... | |
| virtual void | toggleSF () |
| Toggles SF display state. More... | |
| virtual bool | sfShown () const |
| Returns whether active scalar field is visible. More... | |
| virtual void | toggleMaterials () |
| Toggles material display state. More... | |
| virtual void | showNameIn3D (bool state) |
| Sets whether name should be displayed in 3D. More... | |
| virtual bool | nameShownIn3D () const |
| Returns whether name is displayed in 3D or not. More... | |
| virtual void | toggleShowName () |
| Toggles name in 3D display state. More... | |
| virtual bool | isColorOverridden () const |
| virtual const ecvColor::Rgb & | getTempColor () const |
| Returns current temporary (unique) color. More... | |
| virtual void | setTempColor (const ecvColor::Rgb &col, bool autoActivate=true) |
| Sets current temporary (unique) More... | |
| virtual void | enableTempColor (bool state) |
| Set temporary color activation state. More... | |
| virtual float | getOpacity () const |
| virtual void | setOpacity (float opacity) |
| Set opacity activation state. More... | |
| virtual void | setGLTransformation (const ccGLMatrix &trans) |
| Associates entity with a GL transformation (rotation + translation) More... | |
| virtual void | enableGLTransformation (bool state) |
| Enables/disables associated GL transformation. More... | |
| virtual bool | isGLTransEnabled () const |
| Returns whether a GL transformation is enabled or not. More... | |
| virtual const ccGLMatrix & | getGLTransformation () const |
| Returns associated GL transformation. More... | |
| virtual void | resetGLTransformation () |
| Resets associated GL transformation. More... | |
| virtual void | rotateGL (const ccGLMatrix &rotMat) |
| Multiplies (left) current GL transformation by a rotation matrix. More... | |
| virtual void | translateGL (const CCVector3 &trans) |
| Translates current GL transformation by a rotation matrix. More... | |
| virtual void | removeAllClipPlanes () |
| Removes all clipping planes (if any) More... | |
| virtual bool | addClipPlanes (const ccClipPlane &plane) |
| Registers a new clipping plane. More... | |
| virtual void | toggleClipPlanes (CC_DRAW_CONTEXT &context, bool enable) |
| Enables or disables clipping planes (OpenGL) More... | |
| virtual void | applyDisplayState (const DisplayState &state) |
| Applies a display state. More... | |
| Public Member Functions inherited from cloudViewer::GenericIndexedCloudPersist | |
| ~GenericIndexedCloudPersist () override=default | |
| Default destructor. More... | |
| Public Member Functions inherited from cloudViewer::GenericIndexedCloud | |
| ~GenericIndexedCloud () override=default | |
| Default destructor. More... | |
| Public Member Functions inherited from cloudViewer::GenericCloud | |
| GenericCloud ()=default | |
| Default constructor. More... | |
| virtual | ~GenericCloud ()=default |
| Default destructor. More... | |
| virtual bool | hasPoints () const |
| Public Member Functions inherited from ccMeasurement | |
| ccMeasurement () | |
| virtual | ~ccMeasurement () |
| void | setDefaultColor (const ecvColor::Rgb &col) |
| void | setHighlightColor (const ecvColor::Rgb &col) |
| void | setActiveColor (const ecvColor::Rgb &col) |
| void | setAlternateColor (const ecvColor::Rgb &col) |
| ecvColor::Rgb | getMeasurementColour () const |
| void | setActive (bool isActive) |
| void | setHighlight (bool isActive) |
| void | setAlternate (bool isActive) |
| void | setNormal () |
Static Public Member Functions | |
| static bool | isSNECloud (ccHObject *obj) |
| Static Public Member Functions inherited from ccPointCloud | |
| static ccPointCloud * | From (const cloudViewer::GenericIndexedCloud *cloud, const ccGenericPointCloud *sourceCloud=nullptr) |
| Creates a new point cloud object from a GenericIndexedCloud. More... | |
| static ccPointCloud * | From (cloudViewer::GenericCloud *cloud, const ccGenericPointCloud *sourceCloud=nullptr) |
| Creates a new point cloud object from a GenericCloud. More... | |
| static ccPointCloud * | From (const ccPointCloud *sourceCloud, const std::vector< size_t > &indices, bool invert=false) |
Function to select points from input ccPointCloud into output ccPointCloud. More... | |
| static std::vector< Eigen::Matrix3d > | EstimatePerPointCovariances (const ccPointCloud &input, const cloudViewer::geometry::KDTreeSearchParam &search_param=cloudViewer::geometry::KDTreeSearchParamKNN()) |
| Static function to compute the covariance matrix for each point of a point cloud. Doesn't change the input PointCloud, just outputs the covariance matrices. More... | |
| static std::shared_ptr< ccPointCloud > | CreateFromDepthImage (const cloudViewer::geometry::Image &depth, const cloudViewer::camera::PinholeCameraIntrinsic &intrinsic, const Eigen::Matrix4d &extrinsic=Eigen::Matrix4d::Identity(), double depth_scale=1000.0, double depth_trunc=1000.0, int stride=1, bool project_valid_depth_only=true) |
| Factory function to create a pointcloud from a depth image and a camera model. More... | |
| static std::shared_ptr< ccPointCloud > | CreateFromRGBDImage (const cloudViewer::geometry::RGBDImage &image, const cloudViewer::camera::PinholeCameraIntrinsic &intrinsic, const Eigen::Matrix4d &extrinsic=Eigen::Matrix4d::Identity(), bool project_valid_depth_only=true) |
| Factory function to create a pointcloud from an RGB-D image and a camera model. More... | |
| Static Public Member Functions inherited from ccHObject | |
| static ccHObject * | New (CV_CLASS_ENUM objectType, const char *name=nullptr) |
| Static factory. More... | |
| static ccHObject * | New (const QString &pluginId, const QString &classId, const char *name=nullptr) |
| Static factory (version to be used by external plugin factories) More... | |
| static Eigen::Vector3d | ComputeMinBound (const std::vector< Eigen::Vector3d > &points) |
| Compute min bound of a list points. More... | |
| static Eigen::Vector3d | ComputeMaxBound (const std::vector< Eigen::Vector3d > &points) |
| Compute max bound of a list points. More... | |
| static Eigen::Vector3d | ComputeCenter (const std::vector< Eigen::Vector3d > &points) |
| Computer center of a list of points. More... | |
| static void | ResizeAndPaintUniformColor (std::vector< Eigen::Vector3d > &colors, std::size_t size, const Eigen::Vector3d &color) |
| Resizes the colors vector and paints a uniform color. More... | |
| static void | TransformPoints (const Eigen::Matrix4d &transformation, std::vector< Eigen::Vector3d > &points) |
| Transforms all points with the transformation matrix. More... | |
| static void | TransformNormals (const Eigen::Matrix4d &transformation, std::vector< Eigen::Vector3d > &normals) |
| Transforms the normals with the transformation matrix. More... | |
| static void | TransformCovariances (const Eigen::Matrix4d &transformation, std::vector< Eigen::Matrix3d > &covariances) |
| Transforms all covariance matrices with the transformation. More... | |
| static void | TranslatePoints (const Eigen::Vector3d &translation, std::vector< Eigen::Vector3d > &points, bool relative) |
| Apply translation to the geometry coordinates. More... | |
| static void | ScalePoints (const double scale, std::vector< Eigen::Vector3d > &points, const Eigen::Vector3d ¢er) |
Scale the coordinates of all points by the scaling factor scale. More... | |
| static void | RotatePoints (const Eigen::Matrix3d &R, std::vector< Eigen::Vector3d > &points, const Eigen::Vector3d ¢er) |
Rotate all points with the rotation matrix R. More... | |
| static void | RotateNormals (const Eigen::Matrix3d &R, std::vector< Eigen::Vector3d > &normals) |
Rotate all normals with the rotation matrix R. More... | |
| static void | RotateCovariances (const Eigen::Matrix3d &R, std::vector< Eigen::Matrix3d > &covariances) |
Rotate all covariance matrices with the rotation matrix R. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromXYZ (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from XYZ RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromYZX (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from YZX RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromZXY (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from ZXY RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromXZY (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from XZY RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromZYX (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from ZYX RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromYXZ (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from YXZ RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromAxisAngle (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from AxisAngle RotationType. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromQuaternion (const Eigen::Vector4d &rotation) |
| Get Rotation Matrix from Quaternion. More... | |
| static Eigen::Matrix3d | GetRotationMatrixFromEulerAngle (const Eigen::Vector3d &rotation) |
| Get Rotation Matrix from Euler angle. More... | |
| Static Public Member Functions inherited from ccObject | |
| static unsigned | GetCurrentDBVersion () |
| Returns current database version. More... | |
| static void | SetUniqueIDGenerator (ccUniqueIDGenerator::Shared generator) |
| Sets the unique ID generator. More... | |
| static ccUniqueIDGenerator::Shared | GetUniqueIDGenerator () |
| Returns the unique ID generator. More... | |
| static unsigned | GetNextUniqueID () |
| Returns a new unassigned unique ID. More... | |
| static unsigned | GetLastUniqueID () |
| Returns last assigned unique ID. More... | |
| static CV_CLASS_ENUM | ReadClassIDFromFile (QFile &in, short dataVersion) |
| Helper: reads out class ID from a binary stream. More... | |
| Static Public Member Functions inherited from ccSerializableObject | |
| static bool | WriteError () |
| Sends a custom error message (write error) and returns 'false'. More... | |
| static bool | ReadError () |
| Sends a custom error message (read error) and returns 'false'. More... | |
| static bool | MemoryError () |
| Sends a custom error message (not enough memory) and returns 'false'. More... | |
| static bool | CorruptError () |
| Sends a custom error message (corrupted file) and returns 'false'. More... | |
Protected Member Functions | |
| virtual void | drawMeOnly (CC_DRAW_CONTEXT &context) override |
| Draws the entity only (not its children) More... | |
| Protected Member Functions inherited from ccPointCloud | |
| void | applyGLTransformation (const ccGLMatrix &trans) override |
| Applies a GL transformation to the entity. More... | |
| bool | toFile_MeOnly (QFile &out, short dataVersion) const override |
| Save own object data. More... | |
| short | minimumFileVersion_MeOnly () const override |
| bool | fromFile_MeOnly (QFile &in, short dataVersion, int flags, LoadedIDMap &oldToNewIDMap) override |
| Loads own object data. More... | |
| void | notifyGeometryUpdate () override |
| void | swapPoints (unsigned firstIndex, unsigned secondIndex) override |
| virtual void | removePoints (size_t index) override |
| void | releaseVBOs () |
| Release VBOs. More... | |
| Protected Member Functions inherited from cloudViewer::PointCloudTpl< ccGenericPointCloud > | |
| CCVector3 * | point (unsigned index) |
| Returns non const access to a given point. More... | |
| const CCVector3 * | point (unsigned index) const |
| Returns const access to a given point. More... | |
| Protected Member Functions inherited from ccShiftedObject | |
| bool | saveShiftInfoToFile (QFile &out) const |
| Serialization helper (output) More... | |
| bool | loadShiftInfoFromFile (QFile &in) |
| Serialization helper (input) More... | |
| Protected Member Functions inherited from ccHObject | |
| virtual void | setParent (ccHObject *anObject) |
| Sets parent object. More... | |
| virtual void | drawNameIn3D () |
| Draws the entity name in 3D. More... | |
| virtual void | onDeletionOf (const ccHObject *obj) |
| This method is called when another object is deleted. More... | |
| virtual void | onUpdateOf (ccHObject *obj) |
| This method is called when another object (geometry) is updated. More... | |
| Protected Member Functions inherited from ccObject | |
| virtual bool | getFlagState (CV_OBJECT_FLAG flag) const |
| Returns flag state. More... | |
| virtual void | setFlagState (CV_OBJECT_FLAG flag, bool state) |
| Sets flag state. More... | |
| bool | toFile (QFile &out, short dataVersion) const override |
| Saves data to binary stream. More... | |
| short | minimumFileVersion () const override |
| Returns the minimum file version required to save this instance. More... | |
| bool | fromFile (QFile &in, short dataVersion, int flags, LoadedIDMap &oldToNewIDMap) override |
| Reimplemented from ccSerializableObject::fromFile. More... | |
Additional Inherited Members | |
| Public Types inherited from ccPointCloud | |
| enum | CLONE_WARNINGS { WRN_OUT_OF_MEM_FOR_COLORS = 1 , WRN_OUT_OF_MEM_FOR_NORMALS = 2 , WRN_OUT_OF_MEM_FOR_SFS = 4 , WRN_OUT_OF_MEM_FOR_FWF = 8 } |
| Warnings for the partialClone method (bit flags) More... | |
| enum | RGB_FILTER_TYPES { NONE , BILATERAL , GAUSSIAN , MEAN , MEDIAN } |
| RGB filter types. More... | |
| enum | UnrollMode { CYLINDER = 0 , CONE = 1 , STRAIGHTENED_CONE = 2 , STRAIGHTENED_CONE2 = 3 } |
| using | BaseClass = cloudViewer::PointCloudTpl< ccGenericPointCloud > |
| Base class (shortcut) More... | |
| using | FWFDescriptorSet = QMap< uint8_t, WaveformDescriptor > |
| Waveform descriptors set. More... | |
| using | FWFDataContainer = std::vector< uint8_t > |
| Waveform data container. More... | |
| using | SharedFWFDataContainer = QSharedPointer< const FWFDataContainer > |
| Public Types inherited from ccGenericPointCloud | |
| using | VisibilityTableType = std::vector< unsigned char > |
| Array of "visibility" information for each point. More... | |
| Public Types inherited from ccHObject | |
| enum | DEPENDENCY_FLAGS { DP_NONE = 0 , DP_NOTIFY_OTHER_ON_DELETE = 1 , DP_NOTIFY_OTHER_ON_UPDATE , DP_DELETE_OTHER = 8 , DP_PARENT_OF_OTHER = 24 } |
| Dependency flags. More... | |
| enum | SelectionBehavior { SELECTION_AA_BBOX , SELECTION_FIT_BBOX , SELECTION_IGNORED } |
| Behavior when selected. More... | |
| using | Container = std::vector< ccHObject * > |
| Standard instances container (for children, etc.) More... | |
| using | Shared = QSharedPointer< ccHObject > |
| Shared pointer. More... | |
| using | SharedContainer = std::vector< Shared > |
| Shared instances container (for children, etc.) More... | |
| using | GlobalBoundingBox = cloudViewer::BoundingBoxTpl< double > |
| Global (non-shifted) bounding-box. More... | |
| Public Types inherited from ccSerializableObject | |
| enum | DeserializationFlags { DF_POINT_COORDS_64_BITS , DF_SCALAR_VAL_32_BITS = 2 } |
| Deserialization flags (bit-field) More... | |
| typedef QMultiMap< unsigned, unsigned > | LoadedIDMap |
| Map of loaded unique IDs (old ID --> new ID) More... | |
| Public Types inherited from cloudViewer::GenericCloud | |
| using | genericPointAction = std::function< void(const CCVector3 &, ScalarType &)> |
| Generic function applied to a point (used by foreach) More... | |
| Public Attributes inherited from ccPointCloud | |
| std::vector< Eigen::Matrix3d > | covariances_ |
| Covariance Matrix for each point. More... | |
| Protected Attributes inherited from ccPointCloud | |
| ColorsTableType * | m_rgbColors |
| Colors. More... | |
| NormsIndexesTableType * | m_normals |
| Normals (compressed) More... | |
| bool | m_sfColorScaleDisplayed |
| ccScalarField * | m_currentDisplayedScalarField |
| Currently displayed scalar field. More... | |
| int | m_currentDisplayedScalarFieldIndex |
| Currently displayed scalar field index. More... | |
| std::vector< Grid::Shared > | m_grids |
| Associated grid structure. More... | |
| bool | m_visibilityCheckEnabled |
| Whether visibility check is available or not (during comparison) More... | |
| vboSet | m_vboManager |
| Set of VBOs attached to this cloud. More... | |
| ccPointCloudLOD * | m_lod |
| L.O.D. structure. More... | |
| FWFDescriptorSet | m_fwfDescriptors |
| General waveform descriptors. More... | |
| std::vector< ccWaveform > | m_fwfWaveforms |
| Per-point waveform accessors. More... | |
| SharedFWFDataContainer | m_fwfData |
| Waveforms raw data storage. More... | |
| Protected Attributes inherited from cloudViewer::PointCloudTpl< ccGenericPointCloud > | |
| std::vector< CCVector3 > | m_points |
| 3D Points database More... | |
| BoundingBox | m_bbox |
| Bounding-box. More... | |
| unsigned | m_currentPointIndex |
| 'Iterator' on the points db More... | |
| std::vector< ScalarField * > | m_scalarFields |
| Associated scalar fields. More... | |
| int | m_currentInScalarFieldIndex |
| Index of current scalar field used for input. More... | |
| int | m_currentOutScalarFieldIndex |
| Index of current scalar field used for output. More... | |
| Protected Attributes inherited from ccGenericPointCloud | |
| VisibilityTableType | m_pointsVisibility |
| Per-point visibility table. More... | |
| unsigned char | m_pointSize |
| Point size (won't be applied if 0) More... | |
| Protected Attributes inherited from ccShiftedObject | |
| CCVector3d | m_globalShift |
| Global shift (typically applied at loading time) More... | |
| double | m_globalScale |
| Global scale (typically applied at loading time) More... | |
| Protected Attributes inherited from ccHObject | |
| ccHObject * | m_parent |
| Parent. More... | |
| Container | m_children |
| Children. More... | |
| SelectionBehavior | m_selectionBehavior |
| Selection behavior. More... | |
| std::map< ccHObject *, int > | m_dependencies |
| Dependencies map. More... | |
| ccGLMatrix | m_glTransHistory |
| Cumulative GL transformation. More... | |
| bool | m_isDeleting |
| Flag to safely handle dependencies when the object is being deleted. More... | |
| Protected Attributes inherited from ccObject | |
| QString | m_name |
| Object name. More... | |
| QString | m_baseName |
| QString | m_filePath |
| bool | m_removeFlag |
| unsigned | m_flags |
| Object flags. More... | |
| QVariantMap | m_metaData |
| Associated meta-data. More... | |
| Protected Attributes inherited from ccDrawableObject | |
| bool | m_fixedId |
| bool | m_modelRedraw |
| bool | m_forceRedraw |
| float | m_opacity |
| bool | m_visible |
| Specifies whether the object is visible or not. More... | |
| bool | m_selected |
| Specifies whether the object is selected or not. More... | |
| bool | m_lockedVisibility |
| Specifies whether the visibility can be changed by user or not. More... | |
| bool | m_colorsDisplayed |
| Specifies whether colors should be displayed. More... | |
| bool | m_normalsDisplayed |
| Specifies whether normals should be displayed. More... | |
| bool | m_sfDisplayed |
| Specifies whether scalar field should be displayed. More... | |
| ecvColor::Rgb | m_tempColor |
| Temporary (unique) color. More... | |
| bool | m_colorIsOverridden |
| Temporary (unique) color activation state. More... | |
| ccGLMatrix | m_glTrans |
| Current GL transformation. More... | |
| bool | m_glTransEnabled |
| Current GL transformation activation state. More... | |
| bool | m_showNameIn3D |
| Whether name is displayed in 3D or not. More... | |
| CCVector3d | m_nameIn3DPos |
| Last 2D position of the '3D' name. More... | |
| ccClipPlaneSet | m_clipPlanes |
| Active clipping planes (used for display only) More... | |
| std::vector< DisplayState::Shared > | m_displayStateStack |
| The stack of pushed display states. More... | |
| Protected Attributes inherited from ccMeasurement | |
| bool | m_isActive = false |
| bool | m_isHighlighted = false |
| bool | m_isAlternate = false |
| ecvColor::Rgb | m_active_colour = ecvColor::yellow |
| ecvColor::Rgb | m_highlight_colour = ecvColor::green |
| ecvColor::Rgb | m_alternate_colour = ecvColor::cyan |
| ecvColor::Rgb | m_normal_colour = ecvColor::blue |
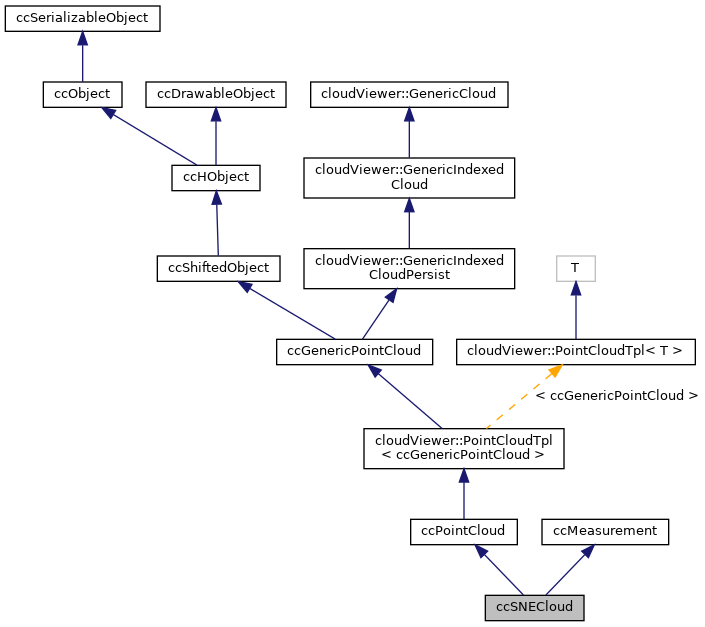
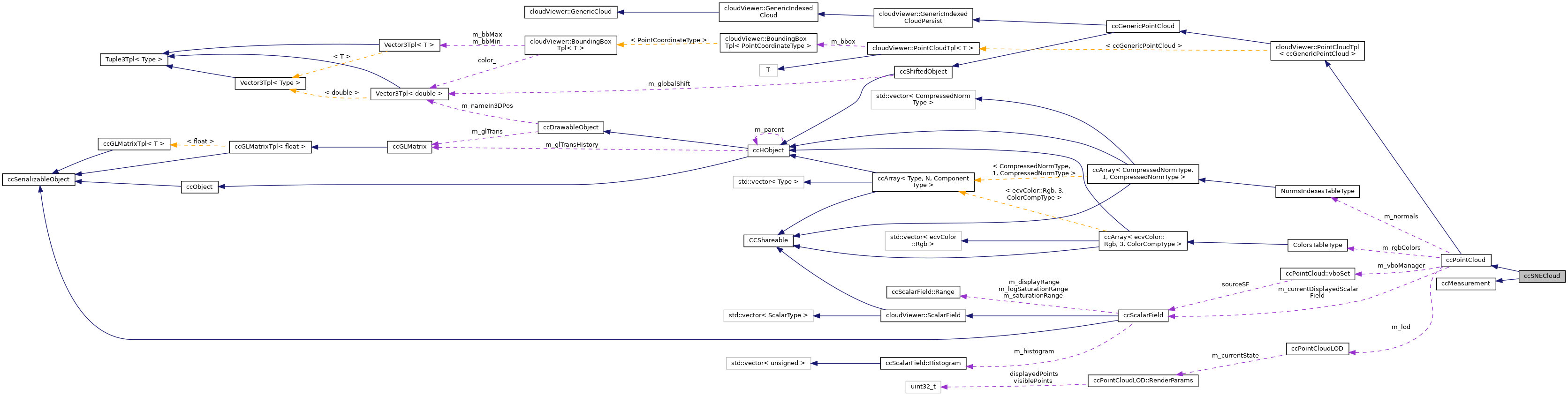
Definition at line 16 of file ccSNECloud.h.
| ccSNECloud::ccSNECloud | ( | ) |
Definition at line 15 of file ccSNECloud.cpp.
References updateMetadata().
| ccSNECloud::ccSNECloud | ( | ccPointCloud * | obj | ) |
Definition at line 17 of file ccSNECloud.cpp.
References ccObject::getName(), ccObject::setName(), and updateMetadata().
|
overrideprotectedvirtual |
Draws the entity only (not its children)
Reimplemented from ccPointCloud.
Definition at line 45 of file ccSNECloud.cpp.
References ccScalarField::areNaNValuesShownInGrey(), ecvColor::RgbTpl< Type >::b, context, ccScalarField::displayRange(), ccPointCloud::drawMeOnly(), ecvColor::RgbTpl< Type >::g, ccScalarField::getColor(), ecvDisplayTools::GetCurrentScreen(), ecvDisplayTools::GetGLCameraParameters(), cloudViewer::PointCloudTpl< ccGenericPointCloud >::getPoint(), ccPointCloud::getPointNormal(), cloudViewer::PointCloudTpl< ccGenericPointCloud >::getScalarField(), cloudViewer::PointCloudTpl< ccGenericPointCloud >::getScalarFieldIndexByName(), cloudViewer::ScalarField::getValue(), ecvDisplayTools::GetViewportParameters(), ccScalarField::Range::isInRange(), ccGenericPointCloud::isVisibilityTableInstantiated(), length(), ccPointCloud::m_currentDisplayedScalarField, ccGenericPointCloud::m_pointsVisibility, MACRO_Draw3D, MACRO_Foreground, POINT_VISIBLE, ecvColor::RgbTpl< Type >::r, and cloudViewer::PointCloudTpl< ccGenericPointCloud >::size().
|
static |
Definition at line 36 of file ccSNECloud.cpp.
References ccObject::hasMetaData().
Referenced by ccCompass::estimateP21(), ccCompass::estimateStrain(), and ccCompass::tryLoading().
| void ccSNECloud::updateMetadata | ( | ) |
Definition at line 28 of file ccSNECloud.cpp.
References ccObject::setMetaData().
Referenced by ccSNECloud().