|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
A very simple point cloud (no point duplication) More...
#include <ReferenceCloud.h>

Public Member Functions | |
| ReferenceCloud (GenericIndexedCloudPersist *associatedCloud) | |
| Default constructor. More... | |
| ReferenceCloud (const ReferenceCloud &refCloud) | |
| Copy constructor. More... | |
| ~ReferenceCloud () override=default | |
| Destructor. More... | |
| unsigned | size () const override |
| Returns the number of points. More... | |
| void | forEach (genericPointAction action) override |
| Fast iteration mechanism. More... | |
| void | getBoundingBox (CCVector3 &bbMin, CCVector3 &bbMax) override |
| Returns the cloud bounding box. More... | |
| unsigned char | testVisibility (const CCVector3 &P) const override |
| void | placeIteratorAtBeginning () override |
| Sets the cloud iterator at the beginning. More... | |
| const CCVector3 * | getNextPoint () override |
| Returns the next point (relatively to the global iterator position) More... | |
| bool | enableScalarField () override |
| Enables the scalar field associated to the cloud. More... | |
| bool | isScalarFieldEnabled () const override |
| Returns true if the scalar field is enabled, false otherwise. More... | |
| void | setPointScalarValue (unsigned pointIndex, ScalarType value) override |
| Sets the ith point associated scalar value. More... | |
| ScalarType | getPointScalarValue (unsigned pointIndex) const override |
| Returns the ith point associated scalar value. More... | |
| const CCVector3 * | getPoint (unsigned index) const override |
| Returns the ith point. More... | |
| void | getPoint (unsigned index, CCVector3 &P) const override |
| Returns the ith point. More... | |
| void | getPoint (unsigned index, double P[3]) const override |
| const CCVector3 * | getPointPersistentPtr (unsigned index) override |
| Returns the ith point as a persistent pointer. More... | |
| virtual unsigned | getPointGlobalIndex (unsigned localIndex) const |
| virtual const CCVector3 * | getCurrentPointCoordinates () const |
| Returns the coordinates of the point pointed by the current element. More... | |
| virtual unsigned | getCurrentPointGlobalIndex () const |
| Returns the global index of the point pointed by the current element. More... | |
| virtual ScalarType | getCurrentPointScalarValue () const |
| Returns the current point associated scalar value. More... | |
| virtual void | setCurrentPointScalarValue (ScalarType value) |
| Sets the current point associated scalar value. More... | |
| virtual void | forwardIterator () |
| Forwards the local element iterator. More... | |
| virtual void | clear (bool releaseMemory=false) |
| Clears the cloud. More... | |
| virtual bool | addPointIndex (unsigned globalIndex) |
| Point global index insertion mechanism. More... | |
| virtual bool | addPointIndex (unsigned firstIndex, unsigned lastIndex) |
| Point global index insertion mechanism (range) More... | |
| virtual void | setPointIndex (unsigned localIndex, unsigned globalIndex) |
| Sets global index for a given element. More... | |
| virtual bool | reserve (unsigned n) |
| Reserves some memory for hosting the point references. More... | |
| virtual bool | resize (unsigned n) |
| Presets the size of the vector used to store point references. More... | |
| virtual unsigned | capacity () const |
| Returns max capacity. More... | |
| virtual void | swap (unsigned i, unsigned j) |
| Swaps two point references. More... | |
| virtual void | removeCurrentPointGlobalIndex () |
| Removes current element. More... | |
| virtual void | removePointGlobalIndex (unsigned localIndex) |
| Removes a given element. More... | |
| virtual GenericIndexedCloudPersist * | getAssociatedCloud () |
| Returns the associated (source) cloud. More... | |
| virtual const GenericIndexedCloudPersist * | getAssociatedCloud () const |
| Returns the associated (source) cloud (const version) More... | |
| virtual void | setAssociatedCloud (GenericIndexedCloudPersist *cloud) |
| Sets the associated (source) cloud. More... | |
| bool | add (const ReferenceCloud &cloud) |
| Add another reference cloud. More... | |
| void | invalidateBoundingBox () |
| Invalidates the bounding-box. More... | |
 Public Member Functions inherited from cloudViewer::GenericIndexedCloudPersist Public Member Functions inherited from cloudViewer::GenericIndexedCloudPersist | |
| ~GenericIndexedCloudPersist () override=default | |
| Default destructor. More... | |
| Public Member Functions inherited from cloudViewer::GenericIndexedCloud | |
| ~GenericIndexedCloud () override=default | |
| Default destructor. More... | |
| virtual bool | normalsAvailable () const |
| Returns whether normals are available. More... | |
| virtual const CCVector3 * | getNormal (unsigned index) const |
| If per-point normals are available, returns the one at a specific index. More... | |
| Public Member Functions inherited from cloudViewer::GenericCloud | |
| GenericCloud ()=default | |
| Default constructor. More... | |
| virtual | ~GenericCloud ()=default |
| Default destructor. More... | |
| virtual bool | hasPoints () const |
Protected Types | |
| using | ReferencesContainer = std::vector< unsigned int > |
| Container of 3D point indexes. More... | |
Protected Attributes | |
| ReferencesContainer | m_theIndexes |
| Indexes of (some of) the associated cloud points. More... | |
| std::atomic< unsigned > | m_globalIterator |
| Iterator on the point references container. More... | |
| BoundingBox | m_bbox |
| Bounding-box. More... | |
| GenericIndexedCloudPersist * | m_theAssociatedCloud |
| Associated cloud. More... | |
| std::mutex | m_mutex |
| For concurrent access. More... | |
Additional Inherited Members | |
| Public Types inherited from cloudViewer::GenericCloud | |
| using | genericPointAction = std::function< void(const CCVector3 &, ScalarType &)> |
| Generic function applied to a point (used by foreach) More... | |
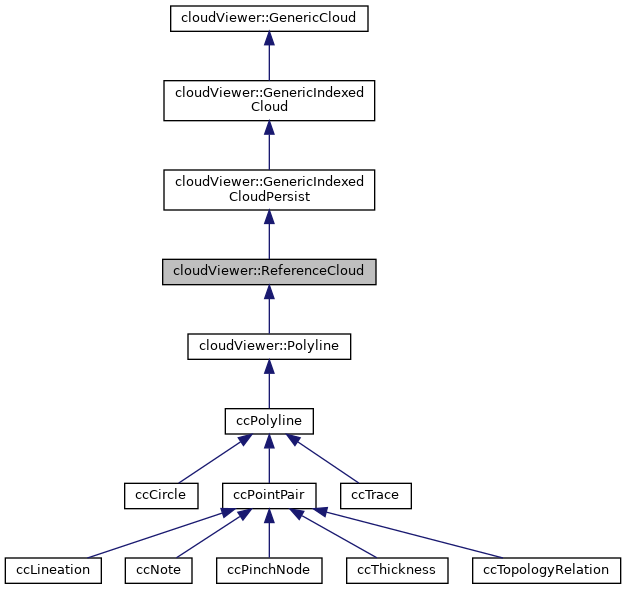
A very simple point cloud (no point duplication)
Implements the GenericIndexedCloudPersist interface. A simple point cloud that stores references to Generic3dPoint instances in a vector.
Partial thread safety for all methods that can change the size of the cloud or that change or rely on point ordering.
Definition at line 29 of file ReferenceCloud.h.
|
protected |
Container of 3D point indexes.
Definition at line 231 of file ReferenceCloud.h.
|
explicit |
Default constructor.
Definition at line 15 of file ReferenceCloud.cpp.
| ReferenceCloud::ReferenceCloud | ( | const ReferenceCloud & | refCloud | ) |
Copy constructor.
Definition at line 18 of file ReferenceCloud.cpp.
|
overridedefault |
Destructor.
| bool ReferenceCloud::add | ( | const ReferenceCloud & | cloud | ) |
Add another reference cloud.
Definition at line 166 of file ReferenceCloud.cpp.
References invalidateBoundingBox(), m_mutex, m_theAssociatedCloud, m_theIndexes, and size().
Referenced by FastMarchingForFacetExtraction::addCellToCurrentFacet(), ccKdTreeForFacetExtraction::FuseCells(), and cloudViewer::geometry::pybind_cloudbase().
|
virtual |
Point global index insertion mechanism (range)
| firstIndex | first point global index of range |
| lastIndex | last point global index of range (excluded) |
Definition at line 98 of file ReferenceCloud.cpp.
References invalidateBoundingBox(), m_mutex, m_theIndexes, and size().
|
virtual |
Point global index insertion mechanism.
| globalIndex | a point global index |
Definition at line 84 of file ReferenceCloud.cpp.
References invalidateBoundingBox(), m_mutex, and m_theIndexes.
Referenced by qCanupo2DViewDialog::addOrSelectPoint(), ccGraphicalSegmentationTool::addPointToPolyline(), cloudViewer::CloudSamplingTools::applyNoiseFilterAtLevel(), cloudViewer::TrueKdTree::build(), ccPointPair::ccPointPair(), ccTrace::ccTrace(), ccTracePolylineTool::ccTracePolylineTool(), ComputeCorePointDescriptor(), ComputeCorePointNormal(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), cloudViewer::DistanceComputationTools::computePoint2MeshDistancesWithOctree(), ccTopologyRelation::constructGraphic(), contourPoly(), contourPoly2(), cloudViewer::GeometricalAnalysisTools::DetectSphereRobust(), qCSF::doAction(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), cloudViewer::DgmOctree::executeFunctionForAllCellsAtLevel(), cloudViewer::DgmOctree::executeFunctionForAllCellsStartingAtLevel(), ccPointListPickingDlg::exportToNewPolyline(), ccContourExtractor::ExtractConcaveHull2D(), ccContourExtractor::ExtractFlatContour(), ccTrace::finalizePath(), cloudViewer::DgmOctree::findPointNeighbourhood(), GrainsAsEllipsoids::fitEllipsoidToGrain(), ccRasterizeTool::generateContours(), G3Point::G3PointAction::getBorders(), GetConeProfile(), cloudViewer::DgmOctree::getPointsInCellByCellIndex(), cloudViewer::DgmOctree::getPointsInCellsWithSortedCellCodes(), ccAlignDlg::getSampledData(), ccAlignDlg::getSampledModel(), ccRegistrationTools::ICP(), ccCompass::importLineations(), ccCompassImport::importLineations(), ProfileLoader::Load(), SalomeHydroFilter::loadFile(), SinusxFilter::loadFile(), ccTracePolylineTool::onItemPicked(), ccLineationTool::pointPicked(), ccNoteTool::pointPicked(), ccPinchNodeTool::pointPicked(), ccThicknessTool::pointPicked(), ccTracePolylineTool::polylineOverSampling(), CommandCrop2D::process(), CommandCSF::process(), cloudViewer::geometry::pybind_cloudbase(), masc::Tools::RandomSubset(), cloudViewer::ICPRegistrationTools::Register(), cloudViewer::CloudSamplingTools::resampleCloudSpatially(), qCanupo2DViewDialog::resetBoundary(), cloudViewer::ManualSegmentationTools::segment(), cloudViewer::CloudSamplingTools::sorFilter(), cloudViewer::TrueKdTree::split(), cloudViewer::CloudSamplingTools::subsampleCellAtLevel(), cloudViewer::CloudSamplingTools::subsampleCloudRandomly(), DistanceMapGenerationDlg::toggleOverlayGrid(), cloudViewer::CloudSamplingTools::UniformDownSample(), GrainsAsEllipsoids::updateMeshAndLineSet(), and ccGraphicalSegmentationTool::updatePolyLine().
|
inlinevirtual |
Returns max capacity.
Definition at line 174 of file ReferenceCloud.h.
Referenced by ccRegistrationTools::ICP(), cloudViewer::geometry::pybind_cloudbase(), and cloudViewer::CloudSamplingTools::resampleCloudSpatially().
|
virtual |
Clears the cloud.
Thread safe.
Reimplemented in cloudViewer::Polyline.
Definition at line 26 of file ReferenceCloud.cpp.
References invalidateBoundingBox(), m_mutex, and m_theIndexes.
Referenced by ccTrace::calculateOptimumSearchRadius(), qCanupoProcess::Classify(), cloudViewer::Polyline::clear(), ComputeCorePointNormal(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), ccCompass::estimateStructureNormals(), cloudViewer::DgmOctree::executeFunctionForAllCellsStartingAtLevel(), cloudViewer::DgmOctree::getPointsInCell(), cloudViewer::DgmOctree::getPointsInCellByCellIndex(), cloudViewer::DgmOctree::getPointsInCellsWithSortedCellCodes(), CommandExtractCCs::process(), cloudViewer::geometry::pybind_cloudbase(), masc::Tools::RandomSubset(), cloudViewer::ICPRegistrationTools::Register(), and FastMarchingForFacetExtraction::updateFlagsTable().
|
inlineoverridevirtual |
Enables the scalar field associated to the cloud.
If the scalar field structure is not yet initialized/allocated, this method gives the signal for its creation. Otherwise, if possible the structure size should be pre-reserved with the same number of elements as the point cloud.
Implements cloudViewer::GenericCloud.
Definition at line 58 of file ReferenceCloud.h.
Referenced by cloudViewer::ICPRegistrationTools::Register().
|
overridevirtual |
Fast iteration mechanism.
Virtual method to apply a function to the whole cloud
| action | the function to apply (see GenericCloud::genericPointAction) |
Implements cloudViewer::GenericCloud.
Definition at line 133 of file ReferenceCloud.cpp.
References count, cloudViewer::GenericIndexedCloudPersist::getPointPersistentPtr(), cloudViewer::GenericCloud::getPointScalarValue(), m_theAssociatedCloud, m_theIndexes, cloudViewer::GenericCloud::setPointScalarValue(), and size().
|
inlinevirtual |
Forwards the local element iterator.
Definition at line 133 of file ReferenceCloud.h.
Referenced by ComparePointsAndTriangles(), cloudViewer::DgmOctree::extractCCs(), cloudViewer::geometry::pybind_cloudbase(), and cloudViewer::FastMarchingForPropagation::setPropagationTimingsAsDistances().
|
inlinevirtual |
Returns the associated (source) cloud.
Definition at line 206 of file ReferenceCloud.h.
Referenced by ccGraphicalSegmentationTool::addEntity(), qCanupo2DViewDialog::addOrSelectPoint(), ccGraphicalSegmentationTool::applySegmentation(), CanDetachCloud(), ccTrace::ccTrace(), cloudViewer::ScalarFieldTools::computeCellGaussianFilter(), ComputeFacetExtensions(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), cloudViewer::ScalarFieldTools::computeMeanGradientOnPatch(), ccTopologyRelation::constructGraphic(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), ccGraphicalSegmentationTool::doExportSegmentationPolyline(), masc::Classifier::evaluate(), ccRasterizeTool::exportContourLines(), qFacets::exportFacets(), cloudViewer::GeometricalAnalysisTools::FlagDuplicatePointsInACellAtLevel(), ccDBRoot::flags(), ccKdTreeForFacetExtraction::FuseCells(), ccRasterizeTool::generateContours(), cloudViewer::DgmOctree::getPointsInCellByCellIndex(), masc::Tools::RandomSubset(), cloudViewer::ICPRegistrationTools::Register(), cloudViewer::ManualSegmentationTools::segmentMesh(), cloudViewer::TrueKdTree::split(), FastMarchingForFacetExtraction::step(), and masc::Classifier::train().
|
inlinevirtual |
Returns the associated (source) cloud (const version)
Definition at line 211 of file ReferenceCloud.h.
Returns the cloud bounding box.
Virtual method to request the cloud bounding box limits
| bbMin | lower bounding-box limits (Xmin,Ymin,Zmin) |
| bbMax | higher bounding-box limits (Xmax,Ymax,Zmax) |
Implements cloudViewer::GenericCloud.
Definition at line 37 of file ReferenceCloud.cpp.
References cloudViewer::BoundingBoxTpl< T >::add(), cloudViewer::BoundingBoxTpl< T >::clear(), cloudViewer::GenericIndexedCloud::getPoint(), cloudViewer::BoundingBoxTpl< T >::isValid(), m_bbox, m_mutex, m_theAssociatedCloud, m_theIndexes, cloudViewer::BoundingBoxTpl< T >::maxCorner(), and cloudViewer::BoundingBoxTpl< T >::minCorner().
Referenced by cloudViewer::TrueKdTree::split().
|
virtual |
Returns the coordinates of the point pointed by the current element.
Returns a persistent pointer.
Definition at line 77 of file ReferenceCloud.cpp.
References cloudViewer::GenericIndexedCloudPersist::getPointPersistentPtr(), m_globalIterator, m_theAssociatedCloud, m_theIndexes, cloudViewer::GenericCloud::size(), and size().
|
inlinevirtual |
Returns the global index of the point pointed by the current element.
Definition at line 113 of file ReferenceCloud.h.
References size.
Referenced by cloudViewer::geometry::pybind_cloudbase().
|
inlinevirtual |
Returns the current point associated scalar value.
Definition at line 119 of file ReferenceCloud.h.
References size.
Referenced by ComparePointsAndTriangles(), and cloudViewer::geometry::pybind_cloudbase().
|
inlineoverridevirtual |
Returns the next point (relatively to the global iterator position)
Virtual method to handle the cloud global iterator. Global iterator position should be increased by one each time this method is called. Warning:
Implements cloudViewer::GenericCloud.
Definition at line 51 of file ReferenceCloud.h.
References size.
|
inlineoverridevirtual |
Returns the ith point.
Virtual method to request a point with a specific index. WARNINGS:
| index | of the requested point (between 0 and the cloud size minus 1) |
Implements cloudViewer::GenericIndexedCloud.
Definition at line 79 of file ReferenceCloud.h.
References size.
Referenced by qCanupo2DViewDialog::addOrSelectPoint(), cloudViewer::CloudSamplingTools::applyNoiseFilterAtLevel(), cloudViewer::CloudSamplingTools::applySORFilterAtLevel(), ComparePointsAndTriangles(), GeneralFilters::compute(), cloudViewer::GeometricalAnalysisTools::ComputeApproxPointsDensityInACellAtLevel(), cloudViewer::ScalarFieldTools::computeCellGaussianFilter(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistance(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistanceWithLocalModel(), cloudViewer::DistanceComputationTools::computeCloud2PolylineEquation(), cloudViewer::GeometricalAnalysisTools::ComputeGeomCharacteristicAtLevel(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), cloudViewer::ScalarFieldTools::computeMeanGradientOnPatch(), ccCompass::convertToPointCloud(), ccPointPair::drawMeOnly(), ccAlignDlg::estimateDelta(), ccCompass::estimateStructureNormals(), ccCompass::fitPlaneToGeoObject(), cloudViewer::GeometricalAnalysisTools::FlagDuplicatePointsInACellAtLevel(), ccKdTreeForFacetExtraction::FuseCells(), qCanupo2DViewDialog::getClosestVertex(), ccPointPair::getDirection(), qCanupo2DViewDialog::moveSelectedPoint(), masc::ContextBasedFeature::prepare(), qCanupo2DViewDialog::removePoint(), SalomeHydroFilter::saveToFile(), SinusxFilter::saveToFile(), HeightProfileFilter::saveToFile(), MascaretFilter::saveToFile(), cloudViewer::TrueKdTree::split(), cloudViewer::CloudSamplingTools::subsampleCellAtLevel(), qCanupo2DViewDialog::updateClassifierPath(), ccLineation::updateMetadata(), ccThickness::updateMetadata(), and DistanceMapGenerationDlg::updateMinAndMaxLimits().
|
inlineoverridevirtual |
Returns the ith point.
Virtual method to request a point with a specific index. Index must be valid (undefined behavior if index is invalid)
| index | of the requested point (between 0 and the cloud size minus 1) |
| P | output point |
Implements cloudViewer::GenericIndexedCloud.
Definition at line 83 of file ReferenceCloud.h.
References size.
|
inlineoverridevirtual |
Reimplemented from cloudViewer::GenericIndexedCloud.
Definition at line 87 of file ReferenceCloud.h.
References size.
|
inlinevirtual |
Returns global index (i.e. relative to the associated cloud) of a given element
| localIndex | local index (i.e. relative to the internal index container) |
Definition at line 103 of file ReferenceCloud.h.
Referenced by qCanupo2DViewDialog::addOrSelectPoint(), cloudViewer::CloudSamplingTools::applyNoiseFilterAtLevel(), cloudViewer::CloudSamplingTools::applySORFilterAtLevel(), ccPointPair::ccPointPair(), ccTrace::ccTrace(), qCanupoProcess::Classify(), ComparePointsAndTriangles(), ComputeAverageColor(), cloudViewer::ScalarFieldTools::computeCellGaussianFilter(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistance(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistanceWithLocalModel(), ComputeCorePointDescriptor(), cloudViewer::GeometricalAnalysisTools::ComputeGeomCharacteristicAtLevel(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), ComputeMathOpWithNearestNeighbor(), cloudViewer::ScalarFieldTools::computeMeanGradientOnPatch(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), ccCompass::estimateStructureNormals(), masc::Classifier::evaluate(), cloudViewer::GeometricalAnalysisTools::FlagDuplicatePointsInACellAtLevel(), ccTrace::getPointNormal(), cloudViewer::geometry::pybind_cloudbase(), RefinePointClassif(), cloudViewer::ICPRegistrationTools::Register(), qCanupo2DViewDialog::removePoint(), cloudViewer::ManualSegmentationTools::segmentMesh(), cloudViewer::TrueKdTree::split(), cloudViewer::CloudSamplingTools::subsampleCellAtLevel(), masc::Classifier::train(), and FastMarchingForFacetExtraction::updateFlagsTable().
|
inlineoverridevirtual |
Returns the ith point as a persistent pointer.
Virtual method to request a point with a specific index. WARNING: the returned object MUST be persistent in order to be compatible with parallel strategies!
| index | of the requested point (between 0 and the cloud size minus 1) |
Implements cloudViewer::GenericIndexedCloudPersist.
Definition at line 93 of file ReferenceCloud.h.
References size.
Referenced by cloudViewer::ScalarFieldTools::computeCellGaussianFilter(), cloudViewer::DistanceComputationTools::computeCloud2MeshDistanceWithOctree(), cloudViewer::GeometricalAnalysisTools::ComputeGeomCharacteristicAtLevel(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), cloudViewer::ScalarFieldTools::computeMeanGradientOnPatch(), and ComputeNeighborhood2MeshDistancesWithOctree().
|
inlineoverridevirtual |
Returns the ith point associated scalar value.
Implements cloudViewer::GenericCloud.
Definition at line 72 of file ReferenceCloud.h.
References size.
Referenced by ComparePointsAndTriangles(), cloudViewer::ScalarFieldTools::computeCellGaussianFilter(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), cloudViewer::ScalarFieldTools::computeMeanGradientOnPatch(), cloudViewer::DistanceComputationTools::diff(), cloudViewer::GeometricalAnalysisTools::FlagDuplicatePointsInACellAtLevel(), and cloudViewer::ICPRegistrationTools::Register().
|
inline |
Invalidates the bounding-box.
Definition at line 227 of file ReferenceCloud.h.
Referenced by add(), addPointIndex(), ccTrace::ccTrace(), clear(), ccRasterizeTool::exportContourLines(), ccTrace::finalizePath(), cloudViewer::geometry::pybind_cloudbase(), cloudViewer::ICPRegistrationTools::Register(), setAssociatedCloud(), and setPointIndex().
|
inlineoverridevirtual |
Returns true if the scalar field is enabled, false otherwise.
Implements cloudViewer::GenericCloud.
Definition at line 62 of file ReferenceCloud.h.
|
inlineoverridevirtual |
Sets the cloud iterator at the beginning.
Virtual method to handle the cloud global iterator
Implements cloudViewer::GenericCloud.
Definition at line 50 of file ReferenceCloud.h.
Referenced by ComparePointsAndTriangles(), cloudViewer::DgmOctree::extractCCs(), and cloudViewer::FastMarchingForPropagation::setPropagationTimingsAsDistances().
|
inlinevirtual |
Removes current element.
WARNING: this method changes the cloud size! Thread safe.
Definition at line 195 of file ReferenceCloud.h.
Referenced by ComparePointsAndTriangles(), and cloudViewer::geometry::pybind_cloudbase().
|
virtual |
Removes a given element.
WARNING: this method changes the cloud size! Thread safe.
Definition at line 146 of file ReferenceCloud.cpp.
References m_mutex, m_theIndexes, and size().
Referenced by cloudViewer::geometry::pybind_cloudbase().
|
virtual |
Reserves some memory for hosting the point references.
| n | the number of points (references) Thread safe. |
Definition at line 51 of file ReferenceCloud.cpp.
References m_mutex, and m_theIndexes.
Referenced by qCanupo2DViewDialog::addOrSelectPoint(), ccTracePolylineTool::ccTracePolylineTool(), ComputeCorePointDescriptor(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), cloudViewer::DistanceComputationTools::computePoint2MeshDistancesWithOctree(), contourPoly(), contourPoly2(), cloudViewer::GeometricalAnalysisTools::DetectSphereRobust(), qCSF::doAction(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), cloudViewer::DgmOctree::executeFunctionForAllCellsAtLevel(), cloudViewer::DgmOctree::executeFunctionForAllCellsStartingAtLevel(), ccPointListPickingDlg::exportToNewPolyline(), ccContourExtractor::ExtractConcaveHull2D(), ccContourExtractor::ExtractFlatContour(), ccRasterizeTool::generateContours(), GetConeProfile(), ccRegistrationTools::ICP(), ProfileLoader::Load(), SalomeHydroFilter::loadFile(), cloudViewer::CloudSamplingTools::noiseFilter(), ccTracePolylineTool::onItemPicked(), ccTracePolylineTool::polylineOverSampling(), CommandCSF::process(), cloudViewer::geometry::pybind_cloudbase(), masc::Tools::RandomSubset(), cloudViewer::ICPRegistrationTools::Register(), cloudViewer::CloudSamplingTools::resampleCloudSpatially(), qCanupo2DViewDialog::resetBoundary(), cloudViewer::CloudSamplingTools::sorFilter(), cloudViewer::TrueKdTree::split(), cloudViewer::CloudSamplingTools::subsampleCloudWithOctreeAtLevel(), and cloudViewer::CloudSamplingTools::UniformDownSample().
|
virtual |
Presets the size of the vector used to store point references.
| n | the number of points (references) Thread safe. |
Definition at line 64 of file ReferenceCloud.cpp.
References m_mutex, and m_theIndexes.
Referenced by ccGraphicalSegmentationTool::closePolyLine(), ComputeCorePointDescriptor(), cloudViewer::GeometricalAnalysisTools::DetectSphereRobust(), qM3C2Tools::GuessBestParams(), ccRegistrationTools::ICP(), cloudViewer::CloudSamplingTools::noiseFilter(), cloudViewer::geometry::pybind_cloudbase(), cloudViewer::ICPRegistrationTools::Register(), qCanupo2DViewDialog::removePoint(), cloudViewer::CloudSamplingTools::resampleCloudSpatially(), cloudViewer::CloudSamplingTools::sorFilter(), FastMarchingForFacetExtraction::step(), cloudViewer::CloudSamplingTools::subsampleCloudRandomly(), and cloudViewer::CloudSamplingTools::UniformDownSample().
|
virtual |
Sets the associated (source) cloud.
Definition at line 161 of file ReferenceCloud.cpp.
References invalidateBoundingBox(), and m_theAssociatedCloud.
Referenced by cloudViewer::ICPRegistrationTools::Register().
|
inlinevirtual |
Sets the current point associated scalar value.
Definition at line 126 of file ReferenceCloud.h.
References size.
Referenced by cloudViewer::DgmOctree::extractCCs(), cloudViewer::geometry::pybind_cloudbase(), and cloudViewer::FastMarchingForPropagation::setPropagationTimingsAsDistances().
|
virtual |
Sets global index for a given element.
| localIndex | local index |
| globalIndex | global index |
Definition at line 127 of file ReferenceCloud.cpp.
References invalidateBoundingBox(), m_theIndexes, and size().
Referenced by qCanupo2DViewDialog::addOrSelectPoint(), qM3C2Tools::GuessBestParams(), cloudViewer::geometry::pybind_cloudbase(), and qCanupo2DViewDialog::removePoint().
|
inlineoverridevirtual |
Sets the ith point associated scalar value.
Implements cloudViewer::GenericCloud.
Definition at line 66 of file ReferenceCloud.h.
References size.
Referenced by ComparePointsAndTriangles(), cloudViewer::DistanceComputationTools::computeApproxCloud2CloudDistance(), cloudViewer::GeometricalAnalysisTools::ComputeApproxPointsDensityInACellAtLevel(), cloudViewer::ScalarFieldTools::computeCellGaussianFilter(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistance(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistanceWithLocalModel(), cloudViewer::DistanceComputationTools::computeCloud2MeshDistancesWithOctree(), cloudViewer::DistanceComputationTools::computeCloud2MeshDistanceWithOctree(), cloudViewer::GeometricalAnalysisTools::ComputeGeomCharacteristicAtLevel(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), ComputeNeighborhood2MeshDistancesWithOctree(), and ccKdTreeForFacetExtraction::FuseCells().
|
inlineoverridevirtual |
Returns the number of points.
Virtual method to request the cloud size
Implements cloudViewer::GenericCloud.
Definition at line 41 of file ReferenceCloud.h.
Referenced by add(), ccRasterizeTool::addNewContour(), qCanupo2DViewDialog::addOrSelectPoint(), addPointIndex(), cloudViewer::CloudSamplingTools::applyNoiseFilterAtLevel(), ccGraphicalSegmentationTool::applySegmentation(), cloudViewer::CloudSamplingTools::applySORFilterAtLevel(), ccLineationTool::cancel(), ccPointPair::ccPointPair(), ccTrace::ccTrace(), ccGraphicalSegmentationTool::closePolyLine(), ccTracePolylineTool::closePolyLine(), ccGraphicalSegmentationTool::closeRectangle(), ComparePointsAndTriangles(), GeneralFilters::compute(), NurbsCurveFitting::compute(), cloudViewer::DistanceComputationTools::computeApproxCloud2CloudDistance(), cloudViewer::GeometricalAnalysisTools::ComputeApproxPointsDensityInACellAtLevel(), ComputeAverageColor(), cloudViewer::ScalarFieldTools::computeCellGaussianFilter(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistance(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistanceWithLocalModel(), ComputeCellStats(), cloudViewer::DistanceComputationTools::computeCloud2MeshDistancesWithOctree(), cloudViewer::DistanceComputationTools::computeCloud2MeshDistanceWithOctree(), cloudViewer::DistanceComputationTools::computeCloud2PolylineEquation(), ComputeCorePointDescriptor(), ComputeCorePointNormal(), cloudViewer::GeometricalAnalysisTools::ComputeGeomCharacteristicAtLevel(), cloudViewer::StatisticalTestingTools::computeLocalChi2DistAtLevel(), cloudViewer::ScalarFieldTools::computeMeanGradientOnPatch(), ComputeNeighborhood2MeshDistancesWithOctree(), DimensionalityScaleParamsComputer::computeScaleParams(), ccCompass::convertToPointCloud(), ccPointPairRegistrationDlg::convertToSphereCenter(), qFacets::createFacets(), ccCropTool::Crop(), ccAlignDlg::dataSamplingRateChanged(), DescendingLeafSizeComparison(), cloudViewer::GeometricalAnalysisTools::DetectSphereRobust(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), ccGraphicalSegmentationTool::doExportSegmentationPolyline(), ccPointPair::drawMeOnly(), ccAlignDlg::estimateDelta(), ccCompass::estimateStructureNormals(), masc::Classifier::evaluate(), cloudViewer::DgmOctree::extractCCs(), ccPropertiesTreeDelegate::fillWithPolyline(), ccPropertiesTreeDelegate::fillWithViewProperties(), ccTrace::fitPlane(), ccCompass::fitPlaneToGeoObject(), cloudViewer::GeometricalAnalysisTools::FlagDuplicatePointsInACellAtLevel(), forEach(), cloudViewer::AutoSegmentationTools::frontPropagationBasedSegmentation(), ccKdTreeForFacetExtraction::FuseCells(), ccRasterizeTool::generateContours(), qCanupo2DViewDialog::getClosestVertex(), getCurrentPointCoordinates(), ccPointPair::getDirection(), ccRegistrationTools::ICP(), ccAlignDlg::modelSamplingRateChanged(), qCanupo2DViewDialog::moveSelectedPoint(), cloudViewer::CloudSamplingTools::noiseFilter(), ccTrace::optimizePath(), ccLineationTool::pointPicked(), ccTraceTool::pointPicked(), ccTracePolylineTool::polylineOverSampling(), CommandSubsample::process(), CommandExtractCCs::process(), CommandCrop2D::process(), cloudViewer::geometry::pybind_cloudbase(), cloudViewer::geometry::pybind_facet(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::geometry::pybind_polyline(), masc::Tools::RandomSubset(), cloudViewer::ICPRegistrationTools::Register(), qCanupo2DViewDialog::removePoint(), removePointGlobalIndex(), cloudViewer::CloudSamplingTools::resampleCellAtLevel(), cloudViewer::CloudSamplingTools::resampleCloudSpatially(), SalomeHydroFilter::saveToFile(), SinusxFilter::saveToFile(), HeightProfileFilter::saveToFile(), MascaretFilter::saveToFile(), cloudViewer::ManualSegmentationTools::segmentMesh(), setPointIndex(), cloudViewer::FastMarchingForPropagation::setPropagationTimingsAsDistances(), FastMarchingForFacetExtraction::setSeedCell(), cloudViewer::CloudSamplingTools::sorFilter(), cloudViewer::TrueKdTree::split(), FastMarchingForFacetExtraction::step(), cloudViewer::CloudSamplingTools::subsampleCellAtLevel(), masc::Classifier::train(), qCanupo2DViewDialog::updateClassifierPath(), FastMarchingForFacetExtraction::updateFlagsTable(), ccLineation::updateMetadata(), ccThickness::updateMetadata(), and DistanceMapGenerationDlg::updateMinAndMaxLimits().
|
inlinevirtual |
Swaps two point references.
the point references indexes should be smaller than the total number of "reserved" points (see ReferenceCloud::reserve).
| i | the first point index |
| j | the second point index Thread safe. |
Definition at line 185 of file ReferenceCloud.h.
References std::swap().
Referenced by ComputeCorePointDescriptor(), cloudViewer::geometry::pybind_cloudbase(), and cloudViewer::CloudSamplingTools::subsampleCloudRandomly().
|
inlineoverridevirtual |
Returns a given point visibility state (relatively to a sensor for instance) Generic method to request a point visibility (should be overloaded if this functionality is required). The point visibility is such as defined in Daniel Girardeau-Montaut's PhD manuscript (see Chapter 2, section 2-3-3). In this case, a ground based laser sensor model should be used to determine it. This method is called before performing any point-to-cloud comparison. If the result is not POINT_VISIBLE, then the comparison won't be performed and the scalar field value associated to this point will be this visibility value.
| P | the 3D point to test |
Reimplemented from cloudViewer::GenericCloud.
Definition at line 46 of file ReferenceCloud.h.
|
protected |
|
protected |
Iterator on the point references container.
Definition at line 237 of file ReferenceCloud.h.
Referenced by getCurrentPointCoordinates().
|
protected |
For concurrent access.
Definition at line 250 of file ReferenceCloud.h.
Referenced by add(), addPointIndex(), clear(), getBoundingBox(), removePointGlobalIndex(), reserve(), and resize().
|
protected |
Associated cloud.
The cloud from which references are referring to. WARNING: do not use the inner iterator as it is used to 'implement' the ReferenceCloud one.
Definition at line 247 of file ReferenceCloud.h.
Referenced by add(), forEach(), getBoundingBox(), getCurrentPointCoordinates(), and setAssociatedCloud().
|
protected |
Indexes of (some of) the associated cloud points.
Definition at line 234 of file ReferenceCloud.h.
Referenced by add(), addPointIndex(), clear(), forEach(), getBoundingBox(), getCurrentPointCoordinates(), removePointGlobalIndex(), reserve(), resize(), and setPointIndex().