|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
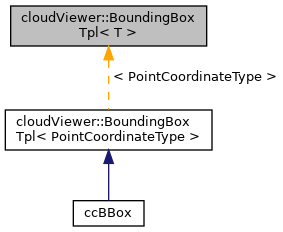
Bounding box structure. More...
#include <BoundingBox.h>
Public Member Functions | |
| BoundingBoxTpl () | |
| Default constructor. More... | |
| BoundingBoxTpl (const Vector3Tpl< T > &minCorner, const Vector3Tpl< T > &maxCorner) | |
| Constructor from two vectors (lower min. and upper max. corners) More... | |
| BoundingBoxTpl< T > | operator+ (const BoundingBoxTpl< T > &bbox) const |
| Returns the 'sum' of this bounding-box and another one. More... | |
| const BoundingBoxTpl< T > & | operator+= (const BoundingBoxTpl< T > &bbox) |
| In place 'sum' of this bounding-box with another one. More... | |
| virtual const BoundingBoxTpl< T > & | operator+= (const Vector3Tpl< T > &V) |
| Shifts the bounding box with a vector. More... | |
| virtual const BoundingBoxTpl< T > & | operator-= (const Vector3Tpl< T > &V) |
| Shifts the bounding box with a vector. More... | |
| virtual const BoundingBoxTpl< T > & | operator*= (T scaleFactor) |
| Scales the bounding box. More... | |
| virtual const BoundingBoxTpl< T > & | operator*= (const SquareMatrixTpl< T > &mat) |
| Rotates the bounding box. More... | |
| void | clear () |
| Resets the bounding box. More... | |
| void | add (const Vector3Tpl< T > &P) |
| 'Enlarges' the bounding box with a point More... | |
| const Vector3Tpl< T > & | minCorner () const |
| Returns min corner (const) More... | |
| const Vector3Tpl< T > & | maxCorner () const |
| Returns max corner (const) More... | |
| Vector3Tpl< T > & | minCorner () |
| Returns min corner. More... | |
| Vector3Tpl< T > & | maxCorner () |
| Returns max corner. More... | |
| Vector3Tpl< T > | getCenter () const |
| Returns center. More... | |
| Vector3Tpl< T > | getDiagVec () const |
| Returns diagonal vector. More... | |
| T | getDiagNorm () const |
| Returns diagonal length. More... | |
| double | getDiagNormd () const |
| Returns diagonal length (double precision) More... | |
| T | getMinBoxDim () const |
| Returns minimal box dimension. More... | |
| T | getMaxBoxDim () const |
| Returns maximal box dimension. More... | |
| double | computeVolume () const |
| Returns the bounding-box volume. More... | |
| void | setValidity (bool state) |
| Sets bonding box validity. More... | |
| bool | isValid () const |
| Returns whether bounding box is valid or not. More... | |
| T | minDistTo (const BoundingBoxTpl< T > &bbox) const |
| bool | contains (const Vector3Tpl< T > &P) const |
| Returns whether a points is inside the box or not. More... | |
| bool | containsEigen (const Eigen::Vector3d &point) const |
| std::vector< std::size_t > | GetPointIndicesWithinBoundingBox (const std::vector< Eigen::Vector3d > &points) const |
| std::vector< std::size_t > | GetPointIndicesWithinBoundingBox (const std::vector< Vector3Tpl< T >> &points) const |
| void | addEigen (const Eigen::Vector3d &point) |
| double | volume () const |
| void | SetColor (const Eigen::Vector3d &color) |
| Sets the bounding box color. More... | |
| Eigen::Vector3d | GetColor () const |
| Gets the bounding box color. More... | |
| double | getXPercentage (double x) const |
| double | getYPercentage (double y) const |
| double | getZPercentage (double z) const |
| void | getBounds (double bounds[6]) const |
Protected Attributes | |
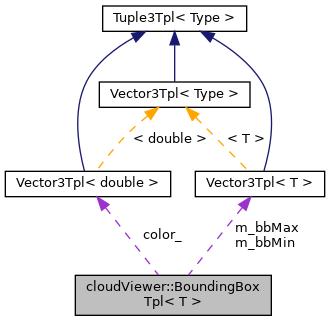
| Vector3Tpl< T > | m_bbMin |
| Lower min. corner. More... | |
| Vector3Tpl< T > | m_bbMax |
| Upper max. corner. More... | |
| CCVector3d | color_ |
| The color of the bounding box in RGB. More... | |
| bool | m_valid |
| Validity. More... | |
Bounding box structure.
Definition at line 25 of file BoundingBox.h.
|
inline |
Default constructor.
Definition at line 28 of file BoundingBox.h.
|
inline |
Constructor from two vectors (lower min. and upper max. corners)
Definition at line 32 of file BoundingBox.h.
|
inline |
'Enlarges' the bounding box with a point
Definition at line 131 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, cloudViewer::BoundingBoxTpl< T >::m_valid, Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
Referenced by cloudViewer::BoundingBoxTpl< T >::addEigen(), ComputeFacetExtensions(), ccPointPairRegistrationDlg::convertToSphereCenter(), cloudViewer::PointCloudTpl< T >::getBoundingBox(), cloudViewer::ReferenceCloud::getBoundingBox(), GrainsAsEllipsoids::GrainsAsEllipsoids(), cloudViewer::BoundingBoxTpl< T >::operator*=(), cloudViewer::BoundingBoxTpl< T >::operator+=(), and GrainsAsEllipsoids::updateBBoxOnlyOne().
|
inline |
Definition at line 260 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::add().
|
inline |
Resets the bounding box.
(0,0,0) --> (0,0,0)
Definition at line 125 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, and cloudViewer::BoundingBoxTpl< T >::m_valid.
Referenced by ccPointPairRegistrationDlg::convertToSphereCenter(), cloudViewer::PointCloudTpl< T >::getBoundingBox(), cloudViewer::ReferenceCloud::getBoundingBox(), GrainsAsEllipsoids::GrainsAsEllipsoids(), cloudViewer::BoundingBoxTpl< T >::operator*=(), ecvAnnotationsTool::reset(), cloudViewer::visualization::ViewControl::ResetBoundingBox(), cloudViewer::ModelViewerWidget::StartRender(), and GrainsAsEllipsoids::updateBBoxOnlyOne().
|
inline |
Returns the bounding-box volume.
Definition at line 192 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::getDiagVec(), Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
Referenced by ccLibAlgorithms::ApplyScaleMatchingAlgorithm().
|
inline |
Returns whether a points is inside the box or not.
Warning: box should be valid!
Definition at line 231 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
Referenced by ccBoundingBoxEditorDlg::checkBaseInclusion(), and cloudViewer::BoundingBoxTpl< T >::GetPointIndicesWithinBoundingBox().
|
inline |
Definition at line 236 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
|
inline |
Definition at line 283 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::maxCorner(), cloudViewer::BoundingBoxTpl< T >::minCorner(), Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
|
inline |
Returns center.
Definition at line 164 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, and cloudViewer::BoundingBoxTpl< T >::m_bbMin.
Referenced by MainWindow::addToDB(), ccDBRoot::alignCameraWithEntity(), ccLibAlgorithms::ApplyScaleMatchingAlgorithm(), ccTopologyRelation::constructGraphic(), cloudViewer::OrientedBoundingBox::CreateFromAxisAlignedBoundingBox(), ccPropertiesTreeDelegate::fillWithHObject(), ccBoundingBoxEditorDlg::fromClipboardClicked(), ccApplyTransformationDlg::initFromDipAndDipDir(), MakeSquare(), CommandCrossSection::process(), CommandMatchBBCenters::process(), ccInnerRect2DFinder::process(), ccBoundingBoxEditorDlg::reflectChanges(), ccBoundingBoxEditorDlg::toClipboardClicked(), cc2Point5DimEditor::update2DDisplayZoom(), DistanceMapGenerationDlg::updateZoom(), and ccContourExtractorDlg::zoomOn().
|
inline |
Gets the bounding box color.
Definition at line 267 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::color_, and Vector3Tpl< double >::fromArray().
Referenced by cloudViewer::t::geometry::AxisAlignedBoundingBox::FromLegacy().
|
inline |
Returns diagonal length.
Definition at line 172 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::getDiagVec(), and Vector3Tpl< Type >::norm().
Referenced by MainWindow::addToDB(), ccComparisonDlg::ccComparisonDlg(), qM3C2Tools::GuessBestParams(), IcmFilter::LoadCalibratedImages(), PcdFilter::loadFile(), LoadScan(), NormalEstimation::openInputDialog(), GreedyTriangulation::openInputDialog(), MarchingCubeReconstruction::openInputDialog(), PoissonReconstruction::openInputDialog(), and DistanceMapGenerationDlg::updateZoom().
|
inline |
Returns diagonal length (double precision)
Definition at line 175 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::getDiagVec(), and Vector3Tpl< Type >::normd().
Referenced by ecvPoissonReconDlg::adjustParams(), qPoissonRecon::doAction(), qM3C2Tools::GuessBestParams(), and ccEntityAction::interpolateSFs().
|
inline |
Returns diagonal vector.
Definition at line 169 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, and cloudViewer::BoundingBoxTpl< T >::m_bbMin.
Referenced by ComputeFacetExtensions(), cloudViewer::BoundingBoxTpl< T >::computeVolume(), cloudViewer::OrientedBoundingBox::CreateFromAxisAlignedBoundingBox(), ccPropertiesTreeDelegate::fillWithHObject(), ccLibAlgorithms::GetDefaultCloudKernelSize(), cloudViewer::BoundingBoxTpl< T >::getDiagNorm(), cloudViewer::BoundingBoxTpl< T >::getDiagNormd(), cloudViewer::BoundingBoxTpl< T >::getMaxBoxDim(), cloudViewer::BoundingBoxTpl< T >::getMinBoxDim(), MakeSquare(), ccInnerRect2DFinder::process(), ccBoundingBoxEditorDlg::reflectChanges(), qCanupoTools::TrainClassifier(), DistanceMapGenerationDlg::updateZoom(), cloudViewer::BoundingBoxTpl< T >::volume(), and ccContourExtractorDlg::zoomOn().
|
inline |
Returns maximal box dimension.
Definition at line 185 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::getDiagVec(), max(), Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
Referenced by ccLibAlgorithms::ApplyScaleMatchingAlgorithm(), qCanupo2DViewDialog::trainClassifier(), and qCanupoTools::TrainClassifier().
|
inline |
Returns minimal box dimension.
Definition at line 178 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::getDiagVec(), min(), Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
Referenced by qFacets::extractFacets().
|
inline |
Definition at line 242 of file BoundingBox.h.
References Vector3Tpl< PointCoordinateType >::fromArrayContainer(), and points.
|
inline |
Definition at line 248 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::contains(), and points.
|
inline |
Definition at line 271 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, and cloudViewer::BoundingBoxTpl< T >::m_bbMin.
|
inline |
Definition at line 275 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, and cloudViewer::BoundingBoxTpl< T >::m_bbMin.
|
inline |
Definition at line 279 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, and cloudViewer::BoundingBoxTpl< T >::m_bbMin.
|
inline |
Returns whether bounding box is valid or not.
Definition at line 203 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_valid.
Referenced by ecvAnnotationsTool::addAssociatedEntity(), ccLibAlgorithms::ApplyScaleMatchingAlgorithm(), ccBoundingBoxEditorDlg::ccBoundingBoxEditorDlg(), ccComputeOctreeDlg::ccComputeOctreeDlg(), ccVolumeCalcTool::ccVolumeCalcTool(), ccBoundingBoxEditorDlg::checkBaseInclusion(), ccEntityAction::computeOctree(), ccVolumeCalcTool::ComputeVolume(), ccVolumeCalcTool::ConvertGridToCloud(), cc2Point5DimEditor::convertGridToCloud(), DistanceMapGenerationDlg::DistanceMapGenerationDlg(), cloudViewer::ModelViewerWidget::EndRender(), ccRasterizeTool::ExportGeoTiff(), ccPropertiesTreeDelegate::fillWithHObject(), ccPropertiesTreeDelegate::fillWithViewProperties(), ccRasterizeTool::generateContours(), cloudViewer::PointCloudTpl< T >::getBoundingBox(), cloudViewer::ReferenceCloud::getBoundingBox(), ccInnerRect2DFinder::init(), ccApplyTransformationDlg::initFromDipAndDipDir(), cloudViewer::BoundingBoxTpl< T >::minDistTo(), NormalEstimation::openInputDialog(), GreedyTriangulation::openInputDialog(), MarchingCubeReconstruction::openInputDialog(), PoissonReconstruction::openInputDialog(), cloudViewer::BoundingBoxTpl< T >::operator+(), cloudViewer::BoundingBoxTpl< T >::operator+=(), CommandCrossSection::process(), ccInnerRect2DFinder::process(), ccBoundingBoxEditorDlg::setBaseBBox(), ecvFilterTool::shiftBox(), ccBoundingBoxEditorDlg::updateCurrentBBox(), ccVolumeCalcTool::updateGrid(), ccRasterizeTool::updateGrid(), ccBoundingBoxEditorDlg::updateXWidth(), ccBoundingBoxEditorDlg::updateYWidth(), DistanceMapGenerationDlg::updateZoom(), ccBoundingBoxEditorDlg::updateZWidth(), ccPointPairRegistrationDlg::zoomGlobalOnRegistrationEntities(), MainWindow::zoomOnEntities(), and MainWindow::zoomOnSelectedEntities().
|
inline |
Returns max corner.
Definition at line 161 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax.
|
inline |
Returns max corner (const)
Definition at line 156 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax.
Referenced by ccBoundingBoxEditorDlg::checkBaseInclusion(), ccEntityAction::computeOctree(), cloudViewer::visualization::ViewControl::ConvertFromViewParameters(), ccCropTool::Crop(), DistanceMapGenerationDlg::DistanceMapGenerationDlg(), ccRasterizeTool::ExportGeoTiff(), cloudViewer::t::geometry::AxisAlignedBoundingBox::FromLegacy(), cloudViewer::PointCloudTpl< T >::getBoundingBox(), cloudViewer::ReferenceCloud::getBoundingBox(), cloudViewer::BoundingBoxTpl< T >::getBounds(), MakeSquare(), cloudViewer::BoundingBoxTpl< T >::operator+=(), CommandCrossSection::process(), ccBoundingBoxEditorDlg::reflectChanges(), ecvFilterTool::shiftBox(), cloudViewer::t::geometry::AxisAlignedBoundingBox::ToLegacy(), and DistanceMapGenerationDlg::updateZoom().
|
inline |
Returns min corner.
Definition at line 159 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMin.
|
inline |
Returns min corner (const)
Definition at line 154 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMin.
Referenced by ccBoundingBoxEditorDlg::checkBaseInclusion(), ccEntityAction::computeOctree(), ccVolumeCalcTool::ComputeVolume(), cloudViewer::visualization::ViewControl::ConvertFromViewParameters(), ccCropTool::Crop(), DistanceMapGenerationDlg::DistanceMapGenerationDlg(), ccRasterizeTool::ExportGeoTiff(), cloudViewer::t::geometry::AxisAlignedBoundingBox::FromLegacy(), ccRasterizeTool::generateContours(), cloudViewer::PointCloudTpl< T >::getBoundingBox(), cloudViewer::ReferenceCloud::getBoundingBox(), cloudViewer::BoundingBoxTpl< T >::getBounds(), MakeSquare(), cloudViewer::BoundingBoxTpl< T >::operator+=(), CommandCrossSection::process(), CommandRasterize::process(), ccBoundingBoxEditorDlg::reflectChanges(), ecvFilterTool::shiftBox(), cloudViewer::t::geometry::AxisAlignedBoundingBox::ToLegacy(), ccRasterizeTool::updateGrid(), and DistanceMapGenerationDlg::updateZoom().
|
inline |
Computes min gap (absolute distance) between this bounding-box and another one
Definition at line 209 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::isValid(), cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, cloudViewer::BoundingBoxTpl< T >::m_valid, Vector3Tpl< Type >::norm(), and Tuple3Tpl< Type >::u.
|
inlinevirtual |
Rotates the bounding box.
Definition at line 99 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::add(), cloudViewer::BoundingBoxTpl< T >::clear(), cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, cloudViewer::BoundingBoxTpl< T >::m_valid, Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
|
inlinevirtual |
Scales the bounding box.
Reimplemented in ccBBox.
Definition at line 89 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, and cloudViewer::BoundingBoxTpl< T >::m_valid.
|
inline |
Returns the 'sum' of this bounding-box and another one.
Definition at line 40 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::isValid(), cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, cloudViewer::BoundingBoxTpl< T >::m_valid, max(), min(), cloudViewer::BoundingBoxTpl< T >::setValidity(), Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
|
inline |
In place 'sum' of this bounding-box with another one.
Definition at line 59 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::add(), cloudViewer::BoundingBoxTpl< T >::isValid(), cloudViewer::BoundingBoxTpl< T >::maxCorner(), and cloudViewer::BoundingBoxTpl< T >::minCorner().
|
inlinevirtual |
Shifts the bounding box with a vector.
Definition at line 69 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, and cloudViewer::BoundingBoxTpl< T >::m_valid.
|
inlinevirtual |
Shifts the bounding box with a vector.
Definition at line 79 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_bbMax, cloudViewer::BoundingBoxTpl< T >::m_bbMin, and cloudViewer::BoundingBoxTpl< T >::m_valid.
|
inline |
Sets the bounding box color.
Definition at line 265 of file BoundingBox.h.
References color, and cloudViewer::BoundingBoxTpl< T >::color_.
Referenced by cloudViewer::t::geometry::AxisAlignedBoundingBox::ToLegacy().
|
inline |
Sets bonding box validity.
Definition at line 200 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::m_valid.
Referenced by cloudViewer::PointCloudTpl< T >::addPoint(), cloudViewer::SimpleMesh::addTriangle(), cloudViewer::visualization::ViewControl::ConvertFromViewParameters(), GrainsAsEllipsoids::GrainsAsEllipsoids(), cloudViewer::PointCloudTpl< T >::invalidateBoundingBox(), cloudViewer::BoundingBoxTpl< T >::operator+(), and GrainsAsEllipsoids::updateBBoxOnlyOne().
|
inline |
Definition at line 262 of file BoundingBox.h.
References cloudViewer::BoundingBoxTpl< T >::getDiagVec(), and Vector3Tpl< Type >::prod().
|
protected |
The color of the bounding box in RGB.
Definition at line 298 of file BoundingBox.h.
Referenced by cloudViewer::BoundingBoxTpl< T >::GetColor(), and cloudViewer::BoundingBoxTpl< T >::SetColor().
|
protected |
Upper max. corner.
Definition at line 296 of file BoundingBox.h.
Referenced by cloudViewer::BoundingBoxTpl< T >::add(), cloudViewer::BoundingBoxTpl< T >::clear(), cloudViewer::BoundingBoxTpl< T >::contains(), cloudViewer::BoundingBoxTpl< T >::containsEigen(), cloudViewer::BoundingBoxTpl< T >::getCenter(), cloudViewer::BoundingBoxTpl< T >::getDiagVec(), cloudViewer::BoundingBoxTpl< T >::getXPercentage(), cloudViewer::BoundingBoxTpl< T >::getYPercentage(), cloudViewer::BoundingBoxTpl< T >::getZPercentage(), cloudViewer::BoundingBoxTpl< T >::maxCorner(), cloudViewer::BoundingBoxTpl< T >::minDistTo(), cloudViewer::BoundingBoxTpl< T >::operator*=(), cloudViewer::BoundingBoxTpl< T >::operator+(), cloudViewer::BoundingBoxTpl< T >::operator+=(), and cloudViewer::BoundingBoxTpl< T >::operator-=().
|
protected |
Lower min. corner.
Definition at line 294 of file BoundingBox.h.
Referenced by cloudViewer::BoundingBoxTpl< T >::add(), cloudViewer::BoundingBoxTpl< T >::clear(), cloudViewer::BoundingBoxTpl< T >::contains(), cloudViewer::BoundingBoxTpl< T >::containsEigen(), cloudViewer::BoundingBoxTpl< T >::getCenter(), cloudViewer::BoundingBoxTpl< T >::getDiagVec(), cloudViewer::BoundingBoxTpl< T >::getXPercentage(), cloudViewer::BoundingBoxTpl< T >::getYPercentage(), cloudViewer::BoundingBoxTpl< T >::getZPercentage(), cloudViewer::BoundingBoxTpl< T >::minCorner(), cloudViewer::BoundingBoxTpl< T >::minDistTo(), cloudViewer::BoundingBoxTpl< T >::operator*=(), cloudViewer::BoundingBoxTpl< T >::operator+(), cloudViewer::BoundingBoxTpl< T >::operator+=(), and cloudViewer::BoundingBoxTpl< T >::operator-=().
|
protected |
Validity.
Definition at line 300 of file BoundingBox.h.
Referenced by cloudViewer::BoundingBoxTpl< T >::add(), cloudViewer::BoundingBoxTpl< T >::clear(), cloudViewer::BoundingBoxTpl< T >::isValid(), cloudViewer::BoundingBoxTpl< T >::minDistTo(), cloudViewer::BoundingBoxTpl< T >::operator*=(), cloudViewer::BoundingBoxTpl< T >::operator+(), cloudViewer::BoundingBoxTpl< T >::operator+=(), cloudViewer::BoundingBoxTpl< T >::operator-=(), and cloudViewer::BoundingBoxTpl< T >::setValidity().