|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <PointCloudTpl.h>

Public Member Functions | |
| PointCloudTpl () | |
| Default constructor. More... | |
| virtual | ~PointCloudTpl () |
| Default destructor. More... | |
| unsigned | size () const override |
| void | forEach (GenericCloud::genericPointAction action) override |
| void | getBoundingBox (CCVector3 &bbMin, CCVector3 &bbMax) override |
| void | placeIteratorAtBeginning () override |
| const CCVector3 * | getNextPoint () override |
| bool | enableScalarField () override |
| bool | isScalarFieldEnabled () const override |
| void | setPointScalarValue (unsigned pointIndex, ScalarType value) override |
| ScalarType | getPointScalarValue (unsigned pointIndex) const override |
| const CCVector3 * | getPoint (unsigned index) const override |
| CCVector3 * | getPointPtr (size_t index) |
| std::vector< CCVector3 > & | getPoints () |
| const std::vector< CCVector3 > & | getPoints () const |
| void | getPoint (unsigned index, CCVector3 &P) const override |
| void | getPoint (unsigned index, double P[3]) const override |
| const CCVector3 * | getPointPersistentPtr (unsigned index) override |
| const CCVector3 * | getPointPersistentPtr (unsigned index) const |
| virtual bool | resize (unsigned newCount) |
| Resizes the point database. More... | |
| virtual bool | reserve (unsigned newCapacity) |
| Reserves memory for the point database. More... | |
| void | reset () |
| Clears the cloud database. More... | |
| void | addPoint (const CCVector3 &P) |
| Adds a 3D point to the database. More... | |
| void | setPoint (size_t index, const CCVector3 &P) |
| void | setEigenPoint (size_t index, const Eigen::Vector3d &point) |
| void | addEigenPoint (const Eigen::Vector3d &point) |
| void | addPoint (double x, double y, double z) |
| void | addPoint (double xyz[3]) |
| void | addPoints (const std::vector< CCVector3 > &points) |
| void | addPoints (const std::vector< Eigen::Vector3d > &points) |
| Eigen::Vector3d | getEigenPoint (size_t index) const |
| std::vector< Eigen::Vector3d > | getEigenPoints () const |
| void | setEigenPoints (const std::vector< Eigen::Vector3d > &points) |
| virtual void | invalidateBoundingBox () |
| Invalidates bounding box. More... | |
| unsigned | getNumberOfScalarFields () const |
| Returns the number of associated (and active) scalar fields. More... | |
| ScalarField * | getScalarField (int index) const |
| Returns a pointer to a specific scalar field. More... | |
| const char * | getScalarFieldName (int index) const |
| Returns the name of a specific scalar field. More... | |
| int | getScalarFieldIndexByName (const char *name) const |
| Returns the index of a scalar field represented by its name. More... | |
| ScalarField * | getCurrentInScalarField () const |
| Returns the scalar field currently associated to the cloud input. More... | |
| ScalarField * | getCurrentOutScalarField () const |
| Returns the scalar field currently associated to the cloud output. More... | |
| void | setCurrentInScalarField (int index) |
| Sets the INPUT scalar field. More... | |
| int | getCurrentInScalarFieldIndex () |
| Returns current INPUT scalar field index (or -1 if none) More... | |
| void | setCurrentOutScalarField (int index) |
| Sets the OUTPUT scalar field. More... | |
| int | getCurrentOutScalarFieldIndex () |
| Returns current OUTPUT scalar field index (or -1 if none) More... | |
| void | setCurrentScalarField (int index) |
| Sets both the INPUT & OUTPUT scalar field. More... | |
| virtual int | addScalarField (const char *uniqueName) |
| Creates a new scalar field and registers it. More... | |
| bool | renameScalarField (int index, const char *newName) |
| Renames a specific scalar field. More... | |
| virtual void | deleteScalarField (int index) |
| Deletes a specific scalar field. More... | |
| virtual void | deleteAllScalarFields () |
| Deletes all scalar fields associated to this cloud. More... | |
| unsigned | capacity () const |
| Returns cloud capacity (i.e. reserved size) More... | |
Protected Member Functions | |
| virtual void | swapPoints (unsigned firstIndex, unsigned secondIndex) |
| Swaps two points (and their associated scalar values!) More... | |
| CCVector3 * | point (unsigned index) |
| Returns non const access to a given point. More... | |
| const CCVector3 * | point (unsigned index) const |
| Returns const access to a given point. More... | |
Protected Attributes | |
| std::vector< CCVector3 > | m_points |
| 3D Points database More... | |
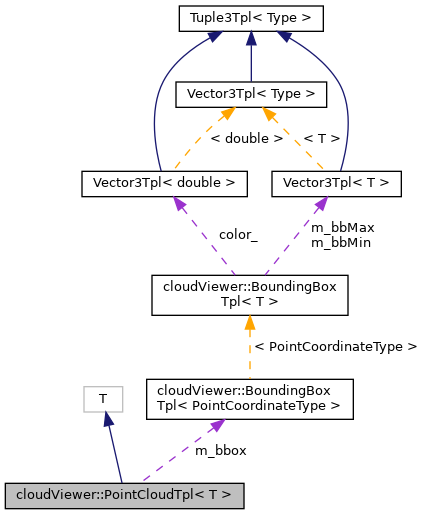
| BoundingBox | m_bbox |
| Bounding-box. More... | |
| unsigned | m_currentPointIndex |
| 'Iterator' on the points db More... | |
| std::vector< ScalarField * > | m_scalarFields |
| Associated scalar fields. More... | |
| int | m_currentInScalarFieldIndex |
| Index of current scalar field used for input. More... | |
| int | m_currentOutScalarFieldIndex |
| Index of current scalar field used for output. More... | |
A storage-efficient point cloud structure that can also handle an unlimited number of scalar fields
Definition at line 23 of file PointCloudTpl.h.
|
inline |
Default constructor.
Definition at line 29 of file PointCloudTpl.h.
|
inlinevirtual |
Default destructor.
Definition at line 36 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::deleteAllScalarFields().
|
inline |
Definition at line 290 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::addPoint().
Referenced by cloudViewer::pipelines::integration::ScalableTSDFVolume::ExtractTriangleMesh(), cloudViewer::pipelines::integration::UniformTSDFVolume::ExtractTriangleMesh(), cloudViewer::io::ReadModelUsingAssimp(), cloudViewer::io::ReadPointCloudFromXYZ(), cloudViewer::io::ReadPointCloudFromXYZN(), cloudViewer::io::ReadPointCloudFromXYZRGB(), cloudViewer::io::ReadPointCloudInMemoryFromXYZ(), cloudViewer::io::ReadTriangleMeshFromGLTF(), cloudViewer::io::ReadTriangleMeshFromOBJ(), and cloudViewer::benchmarks::TestKDTreeLine0::setup().
|
inline |
Adds a 3D point to the database.
To assure the best efficiency, the database memory must have already been reserved (with PointCloud::reserve). Otherwise nothing happens.
| P | a 3D point |
Definition at line 246 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_bbox, cloudViewer::PointCloudTpl< T >::m_points, cloudViewer::BoundingBoxTpl< T >::setValidity(), Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
Referenced by ccPointPairRegistrationDlg::addAlignedPoint(), cloudViewer::PointCloudTpl< T >::addEigenPoint(), qCanupo2DViewDialog::addOrSelectPoint(), cloudViewer::PointCloudTpl< T >::addPoint(), cloudViewer::PointCloudTpl< T >::addPoints(), ccGraphicalSegmentationTool::addPointToPolyline(), ccPointPairRegistrationDlg::addReferencePoint(), AddVertex(), MeshWrapper< Real >::addVertex(), cloudViewer::PointProjectionTools::applyTransformation(), cloudViewer::visualization::Visualizer::CaptureDepthPointCloud(), ccTracePolylineTool::ccTracePolylineTool(), ccEntityAction::computeNormals(), cloudViewer::DistanceComputationTools::computePoint2MeshDistancesWithOctree(), ccTopologyRelation::constructGraphic(), contourPoly(), contourPoly2(), DistanceMapGenerationTool::ConvertConicalMapToMesh(), DistanceMapGenerationTool::ConvertMapToCloud(), DistanceMapGenerationTool::ConvertProfileToMesh(), cloudViewer::PointProjectionTools::developCloudOnCone(), cloudViewer::PointProjectionTools::developCloudOnCylinder(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), ccAlignDlg::estimateDelta(), ccCompass::estimateP21(), ccCompass::estimateStructureNormals(), GrainsAsEllipsoids::exportResultsAsCloud(), ccPointListPickingDlg::exportToNewCloud(), ccPointListPickingDlg::exportToNewPolyline(), ccContourExtractor::ExtractConcaveHull2D(), ccContourExtractor::ExtractFlatContour(), cloudViewer::FPCSRegistrationTools::FilterCandidates(), cloudViewer::FPCSRegistrationTools::FindCongruentBases(), FromFbxMesh(), ccRasterizeTool::generateContours(), GetConeProfile(), getDensity(), getMortarMaps(), ImportSourceVertices(), STEPFilter::importStepFile(), InitializeOutputCloud(), ProfileLoader::Load(), LoadCloud(), CSVMatrixFilter::loadFile(), SalomeHydroFilter::loadFile(), SinusxFilter::loadFile(), SoiFilter::loadFile(), LASFWFFilter::loadFile(), LASFilter::loadFile(), RDBFilter::loadFile(), DistanceMapGenerationDlg::loadOverlaySymbols(), LoadScan(), MergeOldTriangles(), ccTracePolylineTool::onItemPicked(), MainWindow::onItemPicked(), masc::ContextBasedFeature::prepare(), CommandCrop2D::process(), cloudViewer::visualization::MessageProcessor::ProcessMessage(), cloudViewer::ICPRegistrationTools::Register(), cloudViewer::CloudSamplingTools::resampleCellAtLevel(), qCanupo2DViewDialog::resetBoundary(), rotY(), cloudViewer::MeshSamplingTools::samplePointsOnMesh(), DistanceMapGenerationDlg::toggleOverlayGrid(), Cloth::toMesh(), qCanupoTools::TrainClassifier(), cloudViewer::Neighbourhood::triangulateFromQuadric(), and cloudViewer::Neighbourhood::triangulateOnPlane().
|
inline |
Definition at line 292 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::addPoint().
|
inline |
Definition at line 298 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::addPoint().
Referenced by cloudViewer::PointCloudTpl< T >::addPoint().
|
inline |
Definition at line 300 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::addPoint(), and points.
Referenced by cloudViewer::PointCloudTpl< T >::addPoints(), and cloudViewer::t::geometry::PointCloud::ToLegacy().
|
inline |
Definition at line 306 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::addPoints(), Vector3Tpl< PointCoordinateType >::fromArrayContainer(), cloudViewer::PointCloudTpl< T >::m_points, points, and cloudViewer::PointCloudTpl< T >::setEigenPoints().
|
inlinevirtual |
Creates a new scalar field and registers it.
Warnings:
| uniqueName | scalar field name (must be unique) |
Reimplemented in ccPointCloud.
Definition at line 448 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::getScalarFieldIndexByName(), cloudViewer::PointCloudTpl< T >::m_scalarFields, CCShareable::release(), cloudViewer::ScalarField::resizeSafe(), and cloudViewer::PointCloudTpl< T >::size().
Referenced by cloudViewer::PointCloudTpl< T >::enableScalarField().
|
inline |
Returns cloud capacity (i.e. reserved size)
Definition at line 540 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points.
Referenced by ccPointPairRegistrationDlg::addAlignedPoint(), ccPointPairRegistrationDlg::addReferencePoint(), AddVertex(), MeshWrapper< Real >::checkVertexCapacity(), STEPFilter::importStepFile(), LasWaveformLoader::LasWaveformLoader(), SalomeHydroFilter::loadFile(), SinusxFilter::loadFile(), LASFilter::loadFile(), and DistanceMapGenerationDlg::loadOverlaySymbols().
|
inlinevirtual |
Deletes all scalar fields associated to this cloud.
Reimplemented in ccPointCloud.
Definition at line 530 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentInScalarFieldIndex, cloudViewer::PointCloudTpl< T >::m_currentOutScalarFieldIndex, and cloudViewer::PointCloudTpl< T >::m_scalarFields.
Referenced by cloudViewer::PointCloudTpl< T >::reset(), and cloudViewer::PointCloudTpl< T >::~PointCloudTpl().
|
inlinevirtual |
Deletes a specific scalar field.
WARNING: this operation may modify the scalar fields order (especially if the deleted SF is not the last one). However current IN & OUT scalar fields will stay up-to-date (while their index may change).
| index | index of scalar field to be deleted |
Reimplemented in ccPointCloud.
Definition at line 499 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentInScalarFieldIndex, cloudViewer::PointCloudTpl< T >::m_currentOutScalarFieldIndex, cloudViewer::PointCloudTpl< T >::m_scalarFields, and std::swap().
|
inlineoverride |
Definition at line 77 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::addScalarField(), cloudViewer::PointCloudTpl< T >::getCurrentInScalarField(), cloudViewer::PointCloudTpl< T >::getCurrentOutScalarField(), cloudViewer::PointCloudTpl< T >::getScalarFieldIndexByName(), cloudViewer::PointCloudTpl< T >::m_currentInScalarFieldIndex, cloudViewer::PointCloudTpl< T >::m_currentOutScalarFieldIndex, cloudViewer::PointCloudTpl< T >::m_points, and cloudViewer::ScalarField::resizeSafe().
Referenced by cloudViewer::DistanceComputationTools::computePoint2MeshDistancesWithOctree(), ccAlignDlg::estimateDelta(), FastMarchingForFacetExtraction::ExtractPlanarFacets(), and ccKdTreeForFacetExtraction::FuseCells().
|
inlineoverride |
Definition at line 42 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::getCurrentOutScalarField(), cloudViewer::PointCloudTpl< T >::m_points, and cloudViewer::PointCloudTpl< T >::size().
|
inlineoverride |
Definition at line 57 of file PointCloudTpl.h.
References cloudViewer::BoundingBoxTpl< T >::add(), cloudViewer::BoundingBoxTpl< T >::clear(), cloudViewer::BoundingBoxTpl< T >::isValid(), cloudViewer::PointCloudTpl< T >::m_bbox, cloudViewer::PointCloudTpl< T >::m_points, cloudViewer::BoundingBoxTpl< T >::maxCorner(), and cloudViewer::BoundingBoxTpl< T >::minCorner().
Referenced by qRansacSD::doAction(), GrainsAsEllipsoids::fitEllipsoidToGrain(), getDensity(), getMortarMaps(), and ccMeasurementRecorder::setPlane().
|
inline |
Returns the scalar field currently associated to the cloud input.
See PointCloud::setPointScalarValue.
Definition at line 391 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::getScalarField(), and cloudViewer::PointCloudTpl< T >::m_currentInScalarFieldIndex.
Referenced by ccLibAlgorithms::ApplyCCLibAlgorithm(), ccComparisonDlg::computeApproxDistances(), ccComparisonDlg::computeDistances(), ccLibAlgorithms::ComputeGeomCharacteristic(), cloudViewer::PointCloudTpl< T >::enableScalarField(), cloudViewer::PointCloudTpl< T >::isScalarFieldEnabled(), CommandExtractCCs::process(), CommandStatTest::process(), ccEntityAction::processMeshSF(), cloudViewer::geometry::pybind_pointcloud(), ccEntityAction::sfGaussianFilter(), and ccEntityAction::statisticalTest().
|
inline |
Returns current INPUT scalar field index (or -1 if none)
Definition at line 413 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentInScalarFieldIndex.
Referenced by GetScalarFieldIndex(), and ccRegistrationTools::ICP().
|
inline |
Returns the scalar field currently associated to the cloud output.
See PointCloud::getPointScalarValue.
Definition at line 400 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::getScalarField(), and cloudViewer::PointCloudTpl< T >::m_currentOutScalarFieldIndex.
Referenced by cloudViewer::PointCloudTpl< T >::enableScalarField(), FastMarchingForFacetExtraction::ExtractPlanarFacets(), cloudViewer::PointCloudTpl< T >::forEach(), CommandStatTest::process(), cloudViewer::geometry::pybind_pointcloud(), ccEntityAction::rgbGaussianFilter(), and ccEntityAction::sfGaussianFilter().
|
inline |
Returns current OUTPUT scalar field index (or -1 if none)
Definition at line 426 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentOutScalarFieldIndex.
Referenced by CommandSFConvertToRGB::process().
|
inline |
Definition at line 320 of file PointCloudTpl.h.
References Vector3Tpl< double >::fromArray(), and cloudViewer::PointCloudTpl< T >::point().
Referenced by cloudViewer::pipelines::registration::AdvancedMatching(), cloudViewer::pipelines::registration::CorrespondenceCheckerBasedOnEdgeLength::Check(), cloudViewer::pipelines::registration::CorrespondenceCheckerBasedOnDistance::Check(), cloudViewer::pipelines::registration::TransformationEstimationForColoredICP::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationForGeneralizedICP::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationPointToPoint::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationPointToPlane::ComputeRMSE(), cloudViewer::pipelines::registration::TransformationEstimationForColoredICP::ComputeTransformation(), cloudViewer::pipelines::registration::TransformationEstimationForGeneralizedICP::ComputeTransformation(), cloudViewer::pipelines::registration::TransformationEstimationPointToPoint::ComputeTransformation(), cloudViewer::pipelines::registration::TransformationEstimationPointToPlane::ComputeTransformation(), cloudViewer::visualization::rendering::PointCloudBuffersBuilder::ConstructBuffers(), cloudViewer::pipelines::registration::EvaluateRANSACBasedOnCorrespondence(), cloudViewer::pipelines::registration::GetInformationMatrixFromPointClouds(), cloudViewer::pipelines::registration::GetRegistrationResultAndCorrespondences(), cloudViewer::pipelines::registration::OptimizePairwiseRegistration(), cloudViewer::io::WritePointCloudInMemoryToXYZ(), cloudViewer::io::WritePointCloudToPLY(), cloudViewer::io::WritePointCloudToPTS(), cloudViewer::io::WritePointCloudToXYZ(), cloudViewer::io::WritePointCloudToXYZN(), and cloudViewer::io::WritePointCloudToXYZRGB().
|
inline |
Definition at line 324 of file PointCloudTpl.h.
References Vector3Tpl< PointCoordinateType >::fromArrayContainer(), and cloudViewer::PointCloudTpl< T >::m_points.
Referenced by cloudViewer::t::geometry::PointCloud::FromLegacy().
|
inlineoverride |
Definition at line 71 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentPointIndex, and cloudViewer::PointCloudTpl< T >::m_points.
|
inline |
Returns the number of associated (and active) scalar fields.
Definition at line 345 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_scalarFields.
Referenced by ccScalarFieldArithmeticsDlg::Apply(), ccCloudLayersHelper::apply(), CCCloudToDraco(), ccColorFromScalarDlg::ccColorFromScalarDlg(), ccRasterizeTool::ccRasterizeTool(), ccScalarFieldArithmeticsDlg::ccScalarFieldArithmeticsDlg(), masc::PointFeature::checkValidity(), qCanupoProcess::Classify(), ccRasterizeTool::convertGridToCloud(), ccPropertiesTreeDelegate::createEditor(), ccCropTool::Crop(), ccEntityAction::enhanceRGBWithIntensities(), ccPropertiesTreeDelegate::fillSFWithPointCloud(), ccDBRoot::gatherRecursiveInformation(), LasField::GetLASFields(), GetScalarFieldIndex(), ccCloudLayersHelper::getScalarFields(), BasePclModule::getSelectedAvailableScalarFields(), ccCompass::importFoliations(), ccCompass::importLineations(), ccEntityAction::interpolateSFs(), LasSaveDialog::LasSaveDialog(), PopulatePMFields(), PopulateSFCombo(), CommandSFConvertToRGB::process(), CommandSFArithmetic::process(), CommandSFOperation::process(), CommandSFRename::process(), CommandICP::process(), CommandRemoveSF::removeSF(), masc::PointFeature::retrieveField(), masc::Tools::RetrieveSF(), ccColorScaleEditorDialog::saveCurrentScale(), SimpleBinFilter::saveToFile(), LASFWFFilter::saveToFile(), and LASFilter::saveToFile().
|
inlineoverride |
Definition at line 143 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::point().
Referenced by ccPointPairRegistrationDlg::addAlignedPoint(), ccPointPairRegistrationDlg::addReferencePoint(), ccTrace::calculateOptimumSearchRadius(), ccPointPairRegistrationDlg::callHornRegistration(), qCanupoProcess::Classify(), G3Point::G3PointAction::cleanLabels(), cloud2binary(), G3Point::G3PointAction::cluster(), qVoxFallProcess::Compute(), ComputeM3C2DistForPoint(), DistanceMapGenerationTool::ComputeMinAndMaxLatitude_rad(), DistanceMapGenerationTool::ComputeRadialDist(), DistanceMapGenerationTool::ComputeSurfacesAndVolumes(), contourPoly(), contourPoly2(), ConverFromTo(), DistanceMapGenerationTool::ConvertCloudToConical(), DistanceMapGenerationTool::ConvertCloudToCylindrical(), DistanceMapGenerationTool::CreateMap(), ccCropTool::Crop(), qCSF::doAction(), qHoughNormals::doAction(), ccGraphicalSegmentationTool::doActionUseExistingPolyline(), ccGraphicalSegmentationTool::doExportSegmentationPolyline(), ccTrace::drawMeOnly(), ccCompass::estimateP21(), ccCompass::estimateStrain(), ccCompass::estimateStructureNormals(), ccRasterizeTool::exportContourLines(), FastMarchingForFacetExtraction::ExtractPlanarFacets(), cloudViewer::FPCSRegistrationTools::FindCongruentBases(), GrainsAsEllipsoids::fitEllipsoidToGrain(), get_subset(), getCommonPtsIdx(), getDensity(), getMortarMaps(), PointCloudWrapper< Real >::getPoint(), ccTrace::getSegmentCostGrad(), GrainsAsEllipsoids::GrainsAsEllipsoids(), qM3C2Tools::GuessBestParams(), ccCompass::importFoliations(), ccCompassImport::importFoliations(), ccCompass::importLineations(), ccCompassImport::importLineations(), ccTrace::insertWaypoint(), G3Point::G3PointAction::CloudAdaptor::kdtree_get_pt(), MainWindow::onItemPicked(), ccTrace::optimizeSegment(), optRotY(), DimScalarFieldWrapper::pointValue(), ccTracePolylineTool::polylineOverSampling(), masc::ContextBasedFeature::prepare(), CommandCSF::process(), ccPointListPickingDlg::processPickedPoint(), RefinePointClassif(), cloudViewer::ICPRegistrationTools::Register(), ccPointPairRegistrationDlg::removeAlignedPoint(), ccPointPairRegistrationDlg::removeRefPoint(), rotY(), LasSaver::saveNextPoint(), SimpleBinFilter::saveToFile(), LASFWFFilter::saveToFile(), G3Point::G3PointAction::segment(), toTranslatedVector(), ccTracePolylineTool::updatePolyLineTip(), and G3Point::G3PointAction::wolman().
|
inlineoverride |
Definition at line 151 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::point().
|
inlineoverride |
Definition at line 154 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::point(), Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
|
inline |
Definition at line 163 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::point().
|
inlineoverride |
Definition at line 160 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::point().
Referenced by ccGraphicalSegmentationTool::addPointToPolyline(), ccTracePolylineTool::onItemPicked(), SaveScan(), ccGraphicalSegmentationTool::updatePolyLine(), and ccTracePolylineTool::updatePolyLineTip().
|
inline |
Definition at line 146 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::point().
Referenced by cloudViewer::ModelViewerWidget::SelectObject().
|
inline |
Definition at line 149 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points.
Referenced by cloudViewer::visualization::SelectionPolygonVolume::CropInPolygon(), cloudViewer::io::rpc::SetPointCloud(), and cloudViewer::io::rpc::SetTriangleMesh().
|
inline |
Definition at line 150 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points.
|
inlineoverride |
Definition at line 134 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentOutScalarFieldIndex, and cloudViewer::PointCloudTpl< T >::m_scalarFields.
Referenced by ccTrace::buildCurvatureCost(), ccTrace::buildGradientCost(), cloudViewer::DistanceComputationTools::computePoint2MeshDistancesWithOctree(), ccEntityAction::computeStatParams(), masc::ContextBasedFeature::computeValue(), ccAlignDlg::estimateDelta(), ccCompass::estimateStrain(), getMortarMaps(), ccTrace::getSegmentCostCurve(), and ccTrace::getSegmentCostGrad().
|
inline |
Returns a pointer to a specific scalar field.
| index | a scalar field index |
Definition at line 354 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_scalarFields.
Referenced by ccCloudLayersHelper::apply(), ccScalarFieldArithmeticsDlg::Apply(), ccTrace::buildCurvatureCost(), ccTrace::buildGradientCost(), CCCloudToDraco(), ccRasterizeTool::ccRasterizeTool(), ccCloudLayersHelper::changeCode(), masc::Classifier::classify(), qCanupoProcess::Classify(), qM3C2Process::Compute(), DistanceMapGenerationTool::ComputeRadialDist(), ccVolumeCalcTool::convertGridToCloud(), ccVolumeCalcTool::ConvertGridToCloud(), ccRasterizeTool::convertGridToCloud(), ccEntityAction::convertNormalsTo(), ccCropTool::Crop(), ccComparisonDlg::determineBestOctreeLevel(), qPCV::doAction(), qSRA::doProjectCloudDistsInGrid(), ccEntityAction::enhanceRGBWithIntensities(), ccCompass::estimateStructureNormals(), masc::Classifier::evaluate(), GrainsAsEllipsoids::exportResultsAsCloud(), qFacets::extractFacets(), LasSaveDialog::fieldsToSave(), LasExtraScalarFieldCard::fillField(), TreeIso::Final_seg_pcd(), G3Point::G3PointAction::fit(), ccRasterizeTool::generateHillshade(), masc::Tools::GetClassificationSF(), cloudViewer::PointCloudTpl< T >::getCurrentInScalarField(), cloudViewer::PointCloudTpl< T >::getCurrentOutScalarField(), LasField::GetLASFields(), getMortarMaps(), GetScalarField(), ccTrace::getSegmentCostCurve(), ccTrace::getSegmentCostGrad(), GetSource(), LasSaveDialog::handleComboBoxChange(), ccCompass::importFoliations(), ccCompassImport::importFoliations(), ccCompass::importLineations(), ccCompassImport::importLineations(), ccEntityAction::importToSF(), TreeIso::Init_seg_pcd(), TreeIso::Intermediate_seg_pcd(), LasExtraScalarField::MatchExtraBytesToScalarFields(), ccCloudLayersHelper::mouseMove(), ccCloudLayersHelper::moveItem(), ccTrace::optimizePath(), masc::Feature::PrepareSF(), CommandSFRename::process(), PCVCommand::Process(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::PointCloudTpl< T >::renameScalarField(), ccCloudLayersHelper::restoreState(), masc::PointFeature::retrieveField(), masc::Tools::RetrieveSF(), ccColorScaleEditorDialog::saveCurrentScale(), SaveScan(), ccCloudLayersHelper::saveState(), SimpleBinFilter::saveToFile(), LASFWFFilter::saveToFile(), LASFilter::saveToFile(), LasDetails::SelectBestVersion(), ccEntityAction::sfAddIdField(), ccColorFromScalarDlg::updateChannel(), ccColorFromScalarDlg::updateSpinBoxLimits(), and G3Point::G3PointAction::wolman().
|
inline |
Returns the index of a scalar field represented by its name.
| name | a scalar field name |
Definition at line 375 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_scalarFields, and name.
Referenced by ccRasterizeTool::activeLayerChanged(), cloudViewer::PointCloudTpl< T >::addScalarField(), ccScalarFieldArithmeticsDlg::Apply(), ccComparisonDlg::applyAndExit(), ccLibAlgorithms::ApplyCCLibAlgorithm(), ccComparisonDlg::cancelAndExit(), masc::Feature::CheckSFExistence(), masc::PointFeature::checkValidity(), masc::Classifier::classify(), qCanupoProcess::Classify(), qVoxFallProcess::Compute(), ccComparisonDlg::computeApproxDistances(), ccComparisonDlg::computeDistances(), ccLibAlgorithms::ComputeGeomCharacteristic(), DistanceMapGenerationTool::ComputeRadialDist(), ccRasterizeTool::convertGridToCloud(), ccEntityAction::convertNormalsTo(), ccMeasurementDevice::deleteScalarFieldFromCloud(), ccComparisonDlg::determineBestOctreeLevel(), qPCV::doAction(), qSRA::doProjectCloudDistsInGrid(), cloudViewer::PointCloudTpl< T >::enableScalarField(), ccEntityAction::enhanceRGBWithIntensities(), ccCompass::estimateStrain(), masc::Classifier::evaluate(), qFacets::extractFacets(), LasSaveDialog::fieldsToSave(), LasExtraScalarFieldCard::fillField(), TreeIso::Final_seg_pcd(), G3Point::G3PointAction::fit(), ccRasterizeTool::generateHillshade(), masc::Tools::GetClassificationSF(), ccEntityAction::GetFirstAvailableSFName(), G3Point::G3PointAction::GetG3PointAction(), getMortarMaps(), GetScalarFieldIndex(), ccTrace::getSegmentCostCurve(), ccTrace::getSegmentCostGrad(), GetSource(), LasSaveDialog::handleComboBoxChange(), BasePclModule::hasSelectedScalarField(), ccRegistrationTools::ICP(), ccCompass::importFoliations(), ccCompass::importLineations(), ccEntityAction::importToSF(), TreeIso::Init_seg_pcd(), TreeIso::Intermediate_seg_pcd(), ccTrace::isCurvaturePrecomputed(), ccTrace::isGradientPrecomputed(), LoadScan(), LasExtraScalarField::MatchExtraBytesToScalarFields(), ccTrace::optimizePath(), masc::ContextBasedFeature::prepare(), masc::Feature::PrepareSF(), CommandExtractCCs::process(), CommandStatTest::process(), CommandSFRename::process(), PCVCommand::Process(), cloudViewer::geometry::pybind_pointcloud(), SFCollector::releaseSFs(), RemoveScalarField(), cloudViewer::PointCloudTpl< T >::renameScalarField(), masc::Tools::RetrieveSF(), ccEntityAction::rgbGaussianFilter(), SaveScan(), LASFWFFilter::saveToFile(), LasDetails::SelectBestVersion(), ccEntityAction::sfAddIdField(), ccEntityAction::sfGaussianFilter(), ccEntityAction::statisticalTest(), and G3Point::G3PointAction::wolman().
|
inline |
Returns the name of a specific scalar field.
| index | a scalar field index |
Definition at line 365 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_scalarFields.
Referenced by ccLibAlgorithms::ApplyCCLibAlgorithm(), ccColorFromScalarDlg::ccColorFromScalarDlg(), ccScalarFieldArithmeticsDlg::ccScalarFieldArithmeticsDlg(), ccPropertiesTreeDelegate::createEditor(), ccCloudLayersHelper::getScalarFields(), BasePclModule::getSelectedAvailableScalarFields(), ccCompass::importFoliations(), ccCompass::importLineations(), ccEntityAction::interpolateSFs(), LasSaveDialog::LasSaveDialog(), PopulateSFCombo(), ccComparisonDlg::prepareEntitiesForComparison(), cloudViewer::geometry::pybind_pointcloud(), SaveScan(), and SimpleBinFilter::saveToFile().
|
inlinevirtual |
Invalidates bounding box.
Bounding box will be recomputed next time a request is made to 'getBoundingBox'.
Reimplemented in ccPointCloud.
Definition at line 338 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_bbox, and cloudViewer::BoundingBoxTpl< T >::setValidity().
Referenced by cloudViewer::ICPRegistrationTools::Register(), and cloudViewer::PointCloudTpl< T >::reset().
|
inlineoverride |
Definition at line 110 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::getCurrentInScalarField(), and cloudViewer::PointCloudTpl< T >::m_points.
|
inlineoverride |
Definition at line 69 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentPointIndex.
Referenced by cloudViewer::PointCloudTpl< T >::reset().
|
inlineprotected |
Returns non const access to a given point.
WARNING: index must be valid
| index | point index |
Definition at line 564 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points, and cloudViewer::PointCloudTpl< T >::size().
Referenced by cloudViewer::PointCloudTpl< T >::getEigenPoint(), cloudViewer::PointCloudTpl< T >::getPoint(), cloudViewer::PointCloudTpl< T >::getPointPersistentPtr(), cloudViewer::PointCloudTpl< T >::getPointPtr(), and cloudViewer::PointCloudTpl< T >::setEigenPoint().
|
inlineprotected |
Returns const access to a given point.
WARNING: index must be valid
| index | point index |
Definition at line 574 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points, and cloudViewer::PointCloudTpl< T >::size().
|
inline |
Renames a specific scalar field.
Warning: name must not be already given to another SF!
| index | scalar field index |
| newName | new name |
Definition at line 481 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::getScalarField(), cloudViewer::PointCloudTpl< T >::getScalarFieldIndexByName(), and cloudViewer::ScalarField::setName().
Referenced by ccComparisonDlg::applyAndExit(), and cloudViewer::geometry::pybind_pointcloud().
|
inlinevirtual |
Reserves memory for the point database.
This method tries to reserve some memory to store points that will be inserted later (with PointCloud::addPoint). If the new number of points is smaller than the actual one, nothing happens.
| newNumberOfPoints | the new number of points |
Reimplemented in ccSymbolCloud, and ccPointCloud.
Definition at line 213 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points, and cloudViewer::PointCloudTpl< T >::m_scalarFields.
Referenced by AddVertex(), cloudViewer::PointProjectionTools::applyTransformation(), cloudViewer::DistanceComputationTools::computePoint2MeshDistancesWithOctree(), cloudViewer::PointProjectionTools::developCloudOnCone(), cloudViewer::PointProjectionTools::developCloudOnCylinder(), ccAlignDlg::estimateDelta(), cloudViewer::FPCSRegistrationTools::FilterCandidates(), cloudViewer::FPCSRegistrationTools::FindCongruentBases(), ImportSourceVertices(), MergeOldTriangles(), cloudViewer::ICPRegistrationTools::Register(), cloudViewer::CloudSamplingTools::resampleCloudWithOctreeAtLevel(), cloudViewer::MeshSamplingTools::samplePointsOnMesh(), cloudViewer::Neighbourhood::triangulateFromQuadric(), and cloudViewer::Neighbourhood::triangulateOnPlane().
|
inline |
Clears the cloud database.
Equivalent to resize(0).
Definition at line 233 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::deleteAllScalarFields(), cloudViewer::PointCloudTpl< T >::invalidateBoundingBox(), cloudViewer::PointCloudTpl< T >::m_points, and cloudViewer::PointCloudTpl< T >::placeIteratorAtBeginning().
Referenced by cloudViewer::FPCSRegistrationTools::FilterCandidates(), and cloudViewer::ManualSegmentationTools::segmentMeshWithAABox().
|
inlinevirtual |
Resizes the point database.
The cloud database is resized with the specified size. If the new size is smaller, the overflooding points will be deleted. If its greater, the database is filled with blank points (warning, the PointCloud::addPoint method will insert points after those ones).
| newNumberOfPoints | the new number of points |
Reimplemented in ccSymbolCloud, ccPointCloud, and cloudViewer::PointCloud.
Definition at line 175 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points, and cloudViewer::PointCloudTpl< T >::m_scalarFields.
|
inline |
Sets the INPUT scalar field.
This scalar field will be used by the PointCloud::setPointScalarValue method.
| index | a scalar field index (or -1 if none) |
Definition at line 408 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentInScalarFieldIndex.
Referenced by ccLibAlgorithms::ApplyCCLibAlgorithm(), ccTrace::buildCurvatureCost(), ccTrace::buildGradientCost(), CommandStatTest::process(), ccEntityAction::rgbGaussianFilter(), cloudViewer::PointCloudTpl< T >::setCurrentScalarField(), ccEntityAction::sfGaussianFilter(), and ccEntityAction::statisticalTest().
|
inline |
Sets the OUTPUT scalar field.
This scalar field will be used by the PointCloud::getPointScalarValue method.
| index | a scalar field index (or -1 if none) |
Definition at line 421 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentOutScalarFieldIndex.
Referenced by ecvFilterByLabelDlg::apply(), ccLibAlgorithms::ApplyCCLibAlgorithm(), ccTrace::buildGradientCost(), ccCompass::estimateStrain(), masc::ContextBasedFeature::prepare(), ccEntityAction::rgbGaussianFilter(), cloudViewer::PointCloudTpl< T >::setCurrentScalarField(), ccEntityAction::sfGaussianFilter(), and ccEntityAction::statisticalTest().
|
inline |
Sets both the INPUT & OUTPUT scalar field.
This scalar field will be used by both PointCloud::getPointScalarValue and PointCloud::setPointScalarValue methods.
| index | a scalar field index |
Definition at line 435 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::setCurrentInScalarField(), and cloudViewer::PointCloudTpl< T >::setCurrentOutScalarField().
Referenced by ccTrace::buildCurvatureCost(), ccTrace::buildGradientCost(), ccComparisonDlg::computeApproxDistances(), ccComparisonDlg::computeDistances(), ccLibAlgorithms::ComputeGeomCharacteristic(), qPCV::doAction(), ccCompass::estimateP21(), qFacets::extractFacets(), ccTrace::getSegmentCostCurve(), ccTrace::getSegmentCostGrad(), ccRegistrationTools::ICP(), ccTrace::optimizePath(), CommandExtractCCs::process(), PCVCommand::Process(), and ccEntityAction::processMeshSF().
|
inline |
Definition at line 272 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points, cloudViewer::PointCloudTpl< T >::point(), and cloudViewer::PointCloudTpl< T >::size().
Referenced by cloudViewer::PointCloudTpl< T >::setEigenPoints().
|
inline |
Definition at line 327 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points, points, and cloudViewer::PointCloudTpl< T >::setEigenPoint().
Referenced by cloudViewer::PointCloudTpl< T >::addPoints(), and GrainsAsEllipsoids::updateMeshAndLineSet().
|
inline |
Definition at line 259 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points, cloudViewer::PointCloudTpl< T >::size(), Tuple3Tpl< Type >::x, Tuple3Tpl< Type >::y, and Tuple3Tpl< Type >::z.
Referenced by cloudViewer::io::ReadPointCloudFromPTS().
|
inlineoverride |
Definition at line 120 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_currentInScalarFieldIndex, and cloudViewer::PointCloudTpl< T >::m_scalarFields.
Referenced by ccTrace::bakePathToScalarField(), ccTrace::buildCurvatureCost(), ccTrace::buildGradientCost(), cloudViewer::DistanceComputationTools::computePoint2MeshDistancesWithOctree(), FastMarchingForFacetExtraction::ExtractPlanarFacets(), and ccTrace::optimizeSegment().
|
inlineoverride |
Definition at line 38 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points.
Referenced by ccPointPairRegistrationDlg::addAlignedPoint(), qCanupo2DViewDialog::addOrSelectPoint(), ccGraphicalSegmentationTool::addPointToPolyline(), ccPointPairRegistrationDlg::addReferencePoint(), cloudViewer::PointCloudTpl< T >::addScalarField(), AddVertex(), ccTrace::bakePathToScalarField(), ccTrace::buildCurvatureCost(), ccTrace::buildGradientCost(), G3Point::G3PointAction::buildStacksFromG3PointLabelSF(), ccTrace::calculateOptimumSearchRadius(), ccPointPairRegistrationDlg::callHornRegistration(), ccCloudLayersHelper::ccCloudLayersHelper(), ccWaveDialog::ccWaveDialog(), masc::ContextBasedFeature::checkValidity(), MeshWrapper< Real >::checkVertexCapacity(), masc::Classifier::classify(), qCanupoProcess::Classify(), cloud2binary(), qM3C2Process::Compute(), ccComparisonDlg::computeDistances(), ComputeFeatures(), ComputeKmeansClustering(), DistanceMapGenerationTool::ComputeMinAndMaxLatitude_rad(), DistanceMapGenerationTool::ComputeRadialDist(), ccEntityAction::computeStatParams(), DistanceMapGenerationTool::ComputeSurfacesAndVolumes(), cloudViewer::visualization::rendering::PointCloudBuffersBuilder::ConstructBuffers(), contourPoly(), ConverFromTo(), convert(), DistanceMapGenerationTool::ConvertCloudToConical(), DistanceMapGenerationTool::ConvertCloudToCylindrical(), ccRasterizeTool::convertGridToCloud(), DistanceMapGenerationTool::ConvertMapToCloud(), DistanceMapGenerationTool::CreateMap(), ccCropTool::Crop(), qCSF::doAction(), qHoughNormals::doAction(), qPoissonRecon::doAction(), qCanupoPlugin::doTrainAction(), ccAlignDlg::estimateDelta(), ccCompass::estimateP21(), ccCompass::estimateStrain(), ccCompass::estimateStructureNormals(), masc::Classifier::evaluate(), ccRasterizeTool::exportContourLines(), GrainsAsEllipsoids::exportResultsAsCloud(), qFacets::extractFacets(), FastMarchingForFacetExtraction::ExtractPlanarFacets(), cloudViewer::pipelines::integration::ScalableTSDFVolume::ExtractTriangleMesh(), cloudViewer::pipelines::integration::UniformTSDFVolume::ExtractTriangleMesh(), cloudViewer::pipelines::registration::FastGlobalRegistrationBasedOnFeatureMatching(), TreeIso::Final_seg_pcd(), cloudViewer::FPCSRegistrationTools::FindCongruentBases(), GrainsAsEllipsoids::fitEllipsoidToGrain(), cloudViewer::PointCloudTpl< T >::forEach(), ccDBRoot::gatherRecursiveInformation(), ccRasterizeTool::generateHillshade(), G3Point::G3PointAction::getBorders(), PointCloudWrapper< Real >::getColor(), getCommonPtsIdx(), GetKeyCluster(), getMortarMaps(), PointCloudWrapper< Real >::getNormal(), PointCloudWrapper< Real >::getPoint(), cloudViewer::pipelines::registration::GetRegistrationResultAndCorrespondences(), qM3C2Tools::GuessBestParams(), LasWaveformSaver::handlePoint(), LasScalarFieldLoader::handleRGBValue(), ccCommandLineParser::importFile(), ccCompass::importFoliations(), ccCompassImport::importFoliations(), ccCompass::importLineations(), ccCompassImport::importLineations(), ImportSourceVertices(), STEPFilter::importStepFile(), ccEntityAction::importToSF(), StereogramWidget::init(), TreeIso::Init_seg_pcd(), TreeIso::Intermediate_seg_pcd(), G3Point::G3PointAction::CloudAdaptor::kdtree_get_point_count(), cloudViewer::t::geometry::LegacySelectByIndex(), CSVMatrixFilter::loadFile(), SalomeHydroFilter::loadFile(), SinusxFilter::loadFile(), DRCFilter::loadFile(), LASFWFFilter::loadFile(), LASFilter::loadFile(), RDBFilter::loadFile(), DistanceMapGenerationDlg::loadOverlaySymbols(), LasWaveformLoader::loadWaveform(), main(), G3Point::G3PointAction::merge(), MergeOldTriangles(), ccCloudLayersHelper::mouseMove(), ccColorFromScalarDlg::onApply(), ccTracePolylineTool::onItemPicked(), MainWindow::onItemPicked(), ccPointPairRegistrationDlg::onPointCountChanged(), ccTrace::optimizeSegment(), optRotY(), ccGraphicalSegmentationTool::pauseSegmentationMode(), cloudViewer::PointCloudTpl< T >::point(), ccTracePolylineTool::polylineOverSampling(), masc::CorePoints::prepare(), masc::ContextBasedFeature::prepare(), masc::Feature::PrepareSF(), CommandCrossSection::process(), CommandFilterBySFValue::process(), CommandSampleMesh::process(), CommandCSF::process(), ccCloudLayersHelper::projectCloud(), cloudViewer::geometry::pybind_pointcloud(), cloudViewer::geometry::pybind_trianglemesh(), masc::Tools::RandomSubset(), cloudViewer::io::ReadPointCloud(), cloudViewer::io::ReadTriangleMeshFromOBJ(), cloudViewer::ICPRegistrationTools::Register(), cloudViewer::pipelines::registration::RegistrationRANSACBasedOnFeatureMatching(), ccPointPairRegistrationDlg::removeAlignedPoint(), ccPointPairRegistrationDlg::removeRefPoint(), ccCloudLayersHelper::restoreState(), masc::PointFeature::retrieveField(), rotY(), LasSaver::saveNextPoint(), SaveScan(), ccCloudLayersHelper::saveState(), PcdFilter::saveToFile(), SimpleBinFilter::saveToFile(), LASFWFFilter::saveToFile(), G3Point::G3PointAction::segment(), cloudViewer::ModelViewerWidget::SelectObject(), cloudViewer::PointCloudTpl< T >::setEigenPoint(), ecvFilterByLabelDlg::setInputEntity(), cloudViewer::PointCloudTpl< T >::setPoint(), ccCloudLayersHelper::setVisible(), ccEntityAction::sfAddIdField(), ccEntityAction::sfConvertToRandomRGB(), ccComparisonDlg::showHisto(), masc::CorePoints::size(), PointCloudWrapper< Real >::size(), NormDipAndDipDirFieldWrapper::size(), DimScalarFieldWrapper::size(), ColorScalarFieldWrapper::size(), ecvPoissonReconDlg::start(), ecvFilterByLabelDlg::start(), toTranslatedVector(), masc::Classifier::train(), ccPointPairRegistrationDlg::unstackAligned(), ccPointPairRegistrationDlg::unstackRef(), ccPointPairRegistrationDlg::updateAlignInfo(), StereogramDialog::updateFacetsFilter(), cloudViewer::visualization::VisualizerWithVertexSelection::UpdateGeometry(), GrainsAsEllipsoids::updateMeshAndLineSet(), ccGraphicalSegmentationTool::updatePolyLine(), ccTracePolylineTool::updatePolyLineTip(), DistanceMapGenerationDlg::updateZoom(), G3Point::G3PointAction::wolman(), cloudViewer::io::WritePointCloud(), cloudViewer::io::WritePointCloudInMemoryToXYZ(), cloudViewer::io::WritePointCloudToPLY(), cloudViewer::io::WritePointCloudToPTS(), cloudViewer::io::WritePointCloudToXYZ(), cloudViewer::io::WritePointCloudToXYZN(), and cloudViewer::io::WritePointCloudToXYZRGB().
|
inlineprotectedvirtual |
Swaps two points (and their associated scalar values!)
Reimplemented in ccPointCloud.
Definition at line 546 of file PointCloudTpl.h.
References cloudViewer::PointCloudTpl< T >::m_points, cloudViewer::PointCloudTpl< T >::m_scalarFields, and std::swap().
|
protected |
Bounding-box.
Definition at line 583 of file PointCloudTpl.h.
Referenced by cloudViewer::PointCloudTpl< T >::addPoint(), cloudViewer::PointCloudTpl< T >::getBoundingBox(), and cloudViewer::PointCloudTpl< T >::invalidateBoundingBox().
|
protected |
Index of current scalar field used for input.
Definition at line 592 of file PointCloudTpl.h.
Referenced by cloudViewer::PointCloudTpl< T >::deleteAllScalarFields(), cloudViewer::PointCloudTpl< T >::deleteScalarField(), cloudViewer::PointCloudTpl< T >::enableScalarField(), cloudViewer::PointCloudTpl< T >::getCurrentInScalarField(), cloudViewer::PointCloudTpl< T >::getCurrentInScalarFieldIndex(), cloudViewer::PointCloudTpl< T >::setCurrentInScalarField(), and cloudViewer::PointCloudTpl< T >::setPointScalarValue().
|
protected |
Index of current scalar field used for output.
Definition at line 595 of file PointCloudTpl.h.
Referenced by cloudViewer::PointCloudTpl< T >::deleteAllScalarFields(), cloudViewer::PointCloudTpl< T >::deleteScalarField(), cloudViewer::PointCloudTpl< T >::enableScalarField(), cloudViewer::PointCloudTpl< T >::getCurrentOutScalarField(), cloudViewer::PointCloudTpl< T >::getCurrentOutScalarFieldIndex(), cloudViewer::PointCloudTpl< T >::getPointScalarValue(), and cloudViewer::PointCloudTpl< T >::setCurrentOutScalarField().
|
protected |
'Iterator' on the points db
Definition at line 586 of file PointCloudTpl.h.
Referenced by cloudViewer::PointCloudTpl< T >::getNextPoint(), and cloudViewer::PointCloudTpl< T >::placeIteratorAtBeginning().
|
protected |
3D Points database
Definition at line 580 of file PointCloudTpl.h.
Referenced by cloudViewer::PointCloudTpl< T >::addPoint(), cloudViewer::PointCloudTpl< T >::addPoints(), cloudViewer::PointCloudTpl< T >::capacity(), cloudViewer::PointCloudTpl< T >::enableScalarField(), cloudViewer::PointCloudTpl< T >::forEach(), cloudViewer::PointCloudTpl< T >::getBoundingBox(), cloudViewer::PointCloudTpl< T >::getEigenPoints(), cloudViewer::PointCloudTpl< T >::getNextPoint(), cloudViewer::PointCloudTpl< T >::getPoints(), cloudViewer::PointCloudTpl< T >::isScalarFieldEnabled(), cloudViewer::PointCloudTpl< T >::point(), cloudViewer::PointCloudTpl< T >::reserve(), cloudViewer::PointCloudTpl< T >::reset(), cloudViewer::PointCloudTpl< T >::resize(), cloudViewer::PointCloudTpl< T >::setEigenPoint(), cloudViewer::PointCloudTpl< T >::setEigenPoints(), cloudViewer::PointCloudTpl< T >::setPoint(), cloudViewer::PointCloudTpl< T >::size(), and cloudViewer::PointCloudTpl< T >::swapPoints().
|
protected |
Associated scalar fields.
Definition at line 589 of file PointCloudTpl.h.
Referenced by cloudViewer::PointCloudTpl< T >::addScalarField(), cloudViewer::PointCloudTpl< T >::deleteAllScalarFields(), cloudViewer::PointCloudTpl< T >::deleteScalarField(), cloudViewer::PointCloudTpl< T >::getNumberOfScalarFields(), cloudViewer::PointCloudTpl< T >::getPointScalarValue(), cloudViewer::PointCloudTpl< T >::getScalarField(), cloudViewer::PointCloudTpl< T >::getScalarFieldIndexByName(), cloudViewer::PointCloudTpl< T >::getScalarFieldName(), cloudViewer::PointCloudTpl< T >::reserve(), cloudViewer::PointCloudTpl< T >::resize(), cloudViewer::PointCloudTpl< T >::setPointScalarValue(), and cloudViewer::PointCloudTpl< T >::swapPoints().