|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
Correspondence Matching. More...
#include <CorrespondenceMatching.h>
Public Member Functions | |
| CorrespondenceMatching () | |
| virtual | ~CorrespondenceMatching () |
| virtual int | compute () |
| Performs the actual filter job. More... | |
 Public Member Functions inherited from BasePclModule Public Member Functions inherited from BasePclModule | |
| BasePclModule (PclModuleDescription desc=PclModuleDescription(), ccPluginInterface *parent_plugin=0) | |
| Default constructor. More... | |
| QAction * | getAction () |
| Get the action associated with the button used in menu and toolbar creation. More... | |
| QString | getStatusTip () const |
| Returns the status tip. More... | |
| QString | getModuleName () const |
| Returns the name of the filter. More... | |
| QString | getEntryName () const |
| Returns the entry name. More... | |
| QIcon | getIcon () const |
| Returns the icon associated with the button. More... | |
| void | setShowProgressBar (bool status) |
| Sets whether to show a progressbar while computing or not. More... | |
| std::vector< std::string > | getSelectedAvailableScalarFields () |
| ccPointCloud * | getSelectedEntityAsCCPointCloud () const |
| Returns the first selected entity as a ccPointCloud. More... | |
| ccHObject * | getSelectedEntityAsCCHObject () const |
| Returns the first selected entity as a ccHObject. More... | |
| ccHObject::Container | getSelectedThatHaveMetaData (const QString key) const |
| Get selected object that also have the provided metadata key. More... | |
| void | getAllEntitiesOfType (CV_CLASS_ENUM type, ccHObject::Container &entities) |
| Returns all the objects in db tree of type "type". More... | |
| void | getAllEntitiesThatHaveMetaData (QString key, ccHObject::Container &entities) |
| void | getSelectedEntitiesThatAreCCPointCloud (ccHObject::Container &entities) |
| get all entities that are selected and that also are cc_point_cloud More... | |
| void | getSelectedEntitiesThatAre (CV_CLASS_ENUM kind, ccHObject::Container &entities) |
| int | hasSelectedRGB () |
| Returns 1 if the first selected entity has RGB info. More... | |
| int | hasSelectedScalarField () |
| Returns 1 if the first selected entity has at least one scalar field. More... | |
| int | hasSelectedScalarField (std::string field_name) |
| int | isFirstSelectedCcPointCloud () |
| Returns 1 if the first selected object is a ccPointCloud. More... | |
| virtual void | updateSelectedEntities (const ccHObject::Container &selectedEntities) |
| Updates the internal copy of selected entities. More... | |
| void | setMainAppInterface (ecvMainAppInterface *app) |
| Sets associated CC application interface (to access DB) More... | |
| ecvMainAppInterface * | getMainAppInterface () |
| ccPluginInterface * | getParentPlugin () const |
| Returns the associated parent plugin interface. More... | |
Protected Member Functions | |
| virtual int | checkSelected () |
| Checks if current selection is compliant with the filter. More... | |
| virtual int | openInputDialog () |
| virtual void | getParametersFromDialog () |
| Collects parameters from the filter dialog (if openDialog is successful) More... | |
| virtual int | checkParameters () |
| virtual QString | getErrorMessage (int errorCode) |
| Returns the error message corresponding to a given error code. More... | |
| void | applyTransformation (ccHObject *entity, const ccGLMatrixd &mat) |
| Protected Member Functions inherited from BasePclModule | |
| virtual int | openOutputDialog () |
| virtual int | start () |
| Starts computation. More... | |
| virtual void | initAction () |
| Initializes the corresponding action. More... | |
| void | throwError (int errCode) |
Additional Inherited Members | |
| Signals inherited from BasePclModule | |
| void | entityHasChanged (ccHObject *) |
| Signal emitted when an entity is (visually) modified. More... | |
| void | newEntity (ccHObject *) |
| Signal emitted when a new entity is created by the filter. More... | |
| void | newErrorMessage (QString) |
| Signal emitted when a new error message is produced. More... | |
| Protected Slots inherited from BasePclModule | |
| int | performAction () |
| Returns is called when the dialog window is accepted. More... | |
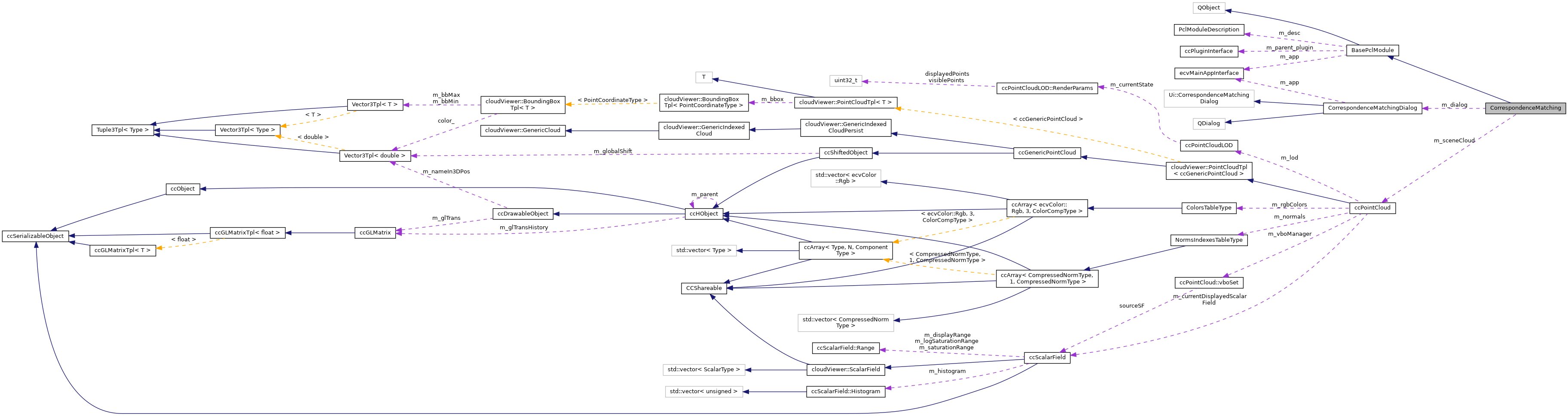
Correspondence Matching.
Definition at line 18 of file CorrespondenceMatching.h.
| CorrespondenceMatching::CorrespondenceMatching | ( | ) |
Definition at line 30 of file CorrespondenceMatching.cpp.
|
virtual |
Definition at line 53 of file CorrespondenceMatching.cpp.
References m_dialog.
|
protected |
Definition at line 489 of file CorrespondenceMatching.cpp.
References ccHObject::applyGLTransformation_recursive(), ccGLMatrixTpl< T >::data(), and ccDrawableObject::setGLTransformation().
|
protectedvirtual |
Checks that the parameters retrieved by getParametersFromDialog are valid Automatically called by performAction. Does nothing by default. Must be overridden if necessary.
Reimplemented from BasePclModule.
Definition at line 130 of file CorrespondenceMatching.cpp.
References m_modelClouds, and m_sceneCloud.
|
protectedvirtual |
Checks if current selection is compliant with the filter.
If not, an error is returned and computation stops. By default, baseclass method simply checks that selection is composed of one and only one ccPointCloud. This method should be overridden if necessary.
Reimplemented from BasePclModule.
Definition at line 58 of file CorrespondenceMatching.cpp.
References BasePclModule::isFirstSelectedCcPointCloud().
|
virtual |
Performs the actual filter job.
This method MUST be re-implemented by derived filter
Generates clouds for each instances found
ICP
Hypothesis Verification
Implements BasePclModule.
Definition at line 137 of file CorrespondenceMatching.cpp.
References ccHObject::addChild(), ccHObject::getChildrenNumber(), ccShiftedObject::getGlobalScale(), ccShiftedObject::getGlobalShift(), CorrespondenceMatchingDialog::getModelCloudByIndex(), ccObject::getName(), ccHObject::getParent(), m_consensusResolution, m_dialog, m_gcMinClusterSize, m_gcMode, m_houghBinSize, m_houghThreshold, m_icpCorrDistance, m_icpMaxIterations, m_leafSize, m_lrfRadius, m_maxThreadCount, m_modelClouds, m_modelSearchRadius, m_normalKSearch, m_sceneCloud, m_sceneSearchRadius, m_shotDescriptorRadius, m_useVoxelGrid, m_verification, BasePclModule::newEntity(), CVLog::Print(), ecvColor::Generator::Random(), ccShiftedObject::setGlobalScale(), ccShiftedObject::setGlobalShift(), ccObject::setName(), ccPointCloud::setRGBColor(), ccDrawableObject::setVisible(), ccDrawableObject::showColors(), ccDrawableObject::showSF(), and size.
|
protectedvirtual |
Returns the error message corresponding to a given error code.
Each filter have a set of possible error message to be used given bt getFilterErrorMessage() Baseclass implementation provides some generic messages.
Reimplemented from BasePclModule.
Definition at line 497 of file CorrespondenceMatching.cpp.
References BasePclModule::getErrorMessage().
|
protectedvirtual |
Collects parameters from the filter dialog (if openDialog is successful)
Automatically called by performAction. Does nothing by default. Must be overridden if necessary.
Reimplemented from BasePclModule.
Definition at line 78 of file CorrespondenceMatching.cpp.
References ecvMainAppInterface::dispToConsole(), ecvMainAppInterface::ERR_CONSOLE_MESSAGE, CorrespondenceMatchingDialog::getEvaluationCloud(), CorrespondenceMatchingDialog::getGcConsensusSetResolution(), CorrespondenceMatchingDialog::getGcMinClusterSize(), CorrespondenceMatchingDialog::getHoughBinSize(), CorrespondenceMatchingDialog::getHoughLRFRadius(), CorrespondenceMatchingDialog::getHoughThreshold(), CorrespondenceMatchingDialog::getMaxThreadCount(), CorrespondenceMatchingDialog::getModelCloudByIndex(), CorrespondenceMatchingDialog::getModelSearchRadius(), CorrespondenceMatchingDialog::getNormalKSearch(), CorrespondenceMatchingDialog::getScales(), CorrespondenceMatchingDialog::getSceneSearchRadius(), CorrespondenceMatchingDialog::getShotDescriptorRadius(), CorrespondenceMatchingDialog::getVerificationFlag(), CorrespondenceMatchingDialog::getVoxelGridLeafSize(), CorrespondenceMatchingDialog::isGCActivated(), BasePclModule::m_app, m_consensusResolution, m_dialog, m_gcMinClusterSize, m_gcMode, m_houghBinSize, m_houghThreshold, m_leafSize, m_lrfRadius, m_maxThreadCount, m_modelClouds, m_modelSearchRadius, m_normalKSearch, m_scales, m_sceneCloud, m_sceneSearchRadius, m_shotDescriptorRadius, m_useVoxelGrid, and m_verification.
|
protectedvirtual |
Opens the input dialog window. Where the user can supply parameters for the computation Automatically called by performAction. Does nothing by default. Must be overridden if a dialog must be displayed.
Reimplemented from BasePclModule.
Definition at line 66 of file CorrespondenceMatching.cpp.
References BasePclModule::m_app, m_dialog, CorrespondenceMatchingDialog::refreshCloudComboBox(), and CorrespondenceMatchingDialog::saveParamsToPersistentSettings().
|
protected |
Definition at line 64 of file CorrespondenceMatching.h.
|
protected |
Definition at line 70 of file CorrespondenceMatching.h.
|
protected |
Definition at line 65 of file CorrespondenceMatching.h.
|
protected |
Definition at line 51 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 37 of file CorrespondenceMatching.h.
Referenced by compute(), getParametersFromDialog(), openInputDialog(), and ~CorrespondenceMatching().
|
protected |
Definition at line 52 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 41 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 56 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 57 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 61 of file CorrespondenceMatching.h.
Referenced by compute().
|
protected |
Definition at line 60 of file CorrespondenceMatching.h.
Referenced by compute().
|
protected |
Definition at line 39 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 55 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 43 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 73 of file CorrespondenceMatching.h.
Referenced by checkParameters(), compute(), and getParametersFromDialog().
|
protected |
Definition at line 45 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 48 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 72 of file CorrespondenceMatching.h.
Referenced by getParametersFromDialog().
|
protected |
Definition at line 36 of file CorrespondenceMatching.h.
Referenced by checkParameters(), compute(), and getParametersFromDialog().
|
protected |
Definition at line 46 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 47 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 40 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 42 of file CorrespondenceMatching.h.
Referenced by compute(), and getParametersFromDialog().
|
protected |
Definition at line 66 of file CorrespondenceMatching.h.
|
protected |
Definition at line 67 of file CorrespondenceMatching.h.
|
protected |
Definition at line 69 of file CorrespondenceMatching.h.
|
protected |
Definition at line 68 of file CorrespondenceMatching.h.