|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
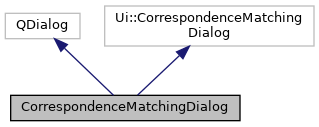
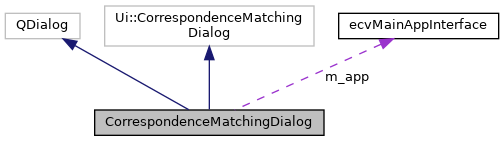
CANUPO plugin's training dialog. More...
#include <CorrespondenceMatchingDialog.h>
Public Member Functions | |
| CorrespondenceMatchingDialog (ecvMainAppInterface *app) | |
| Default constructor. More... | |
| ccPointCloud * | getModel1Cloud () |
| Get model #1 point cloud. More... | |
| ccPointCloud * | getModel2Cloud () |
| Get model #2 point cloud. More... | |
| ccPointCloud * | getModelCloudByIndex (int index) |
| ccPointCloud * | getEvaluationCloud () |
| Get evaluation point cloud. More... | |
| void | loadParamsFromPersistentSettings () |
| Loads parameters from persistent settings. More... | |
| void | saveParamsToPersistentSettings () |
| Saves parameters to persistent settings. More... | |
| bool | getScales (std::vector< float > &scales) const |
| Returns input scales. More... | |
| int | getMaxThreadCount () const |
| Returns the max number of threads to use. More... | |
| float | getVoxelGridLeafSize () const |
| float | getModelSearchRadius () const |
| Returns the Model Search Radius. More... | |
| float | getSceneSearchRadius () const |
| Returns the Scene Search Radius. More... | |
| float | getShotDescriptorRadius () const |
| Returns the Shot Descriptor Radius. More... | |
| float | getNormalKSearch () const |
| Returns the normal KSearch. More... | |
| bool | getVerificationFlag () const |
| bool | isGCActivated () const |
| float | getGcConsensusSetResolution () const |
| float | getGcMinClusterSize () const |
| float | getHoughLRFRadius () const |
| float | getHoughBinSize () const |
| float | getHoughThreshold () const |
| void | refreshCloudComboBox () |
Protected Slots | |
| void | onCloudChanged (int) |
Protected Member Functions | |
| bool | validParameters () const |
| QString | getEntityName (ccHObject *obj) |
| ccPointCloud * | getCloudFromCombo (QComboBox *comboBox, ccHObject *dbRoot) |
Protected Attributes | |
| ecvMainAppInterface * | m_app |
| Gives access to the application (data-base, UI, etc.) More... | |
CANUPO plugin's training dialog.
Definition at line 20 of file CorrespondenceMatchingDialog.h.
| CorrespondenceMatchingDialog::CorrespondenceMatchingDialog | ( | ecvMainAppInterface * | app | ) |
Default constructor.
Definition at line 28 of file CorrespondenceMatchingDialog.cpp.
References loadParamsFromPersistentSettings(), and onCloudChanged().
|
protected |
Definition at line 316 of file CorrespondenceMatchingDialog.cpp.
References ccHObject::find(), ccObject::isA(), and CV_TYPES::POINT_CLOUD.
Referenced by getEvaluationCloud(), getModel1Cloud(), and getModel2Cloud().
|
protected |
Definition at line 303 of file CorrespondenceMatchingDialog.cpp.
References ccObject::getName(), ccObject::getUniqueID(), and name.
Referenced by refreshCloudComboBox().
| ccPointCloud * CorrespondenceMatchingDialog::getEvaluationCloud | ( | ) |
Get evaluation point cloud.
Definition at line 242 of file CorrespondenceMatchingDialog.cpp.
References ecvMainAppInterface::dbRootObject(), getCloudFromCombo(), and m_app.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getGcConsensusSetResolution | ( | ) | const |
Definition at line 138 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getGcMinClusterSize | ( | ) | const |
Definition at line 142 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getHoughBinSize | ( | ) | const |
Definition at line 150 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getHoughLRFRadius | ( | ) | const |
Definition at line 146 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getHoughThreshold | ( | ) | const |
Definition at line 154 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| int CorrespondenceMatchingDialog::getMaxThreadCount | ( | ) | const |
Returns the max number of threads to use.
Definition at line 110 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| ccPointCloud * CorrespondenceMatchingDialog::getModel1Cloud | ( | ) |
Get model #1 point cloud.
Definition at line 210 of file CorrespondenceMatchingDialog.cpp.
References ecvMainAppInterface::dbRootObject(), getCloudFromCombo(), and m_app.
Referenced by getModelCloudByIndex().
| ccPointCloud * CorrespondenceMatchingDialog::getModel2Cloud | ( | ) |
Get model #2 point cloud.
Definition at line 219 of file CorrespondenceMatchingDialog.cpp.
References ecvMainAppInterface::dbRootObject(), getCloudFromCombo(), and m_app.
Referenced by getModelCloudByIndex().
| ccPointCloud * CorrespondenceMatchingDialog::getModelCloudByIndex | ( | int | index | ) |
Definition at line 228 of file CorrespondenceMatchingDialog.cpp.
References getModel1Cloud(), and getModel2Cloud().
Referenced by CorrespondenceMatching::compute(), and CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getModelSearchRadius | ( | ) | const |
Returns the Model Search Radius.
Definition at line 118 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getNormalKSearch | ( | ) | const |
Returns the normal KSearch.
Definition at line 130 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| bool CorrespondenceMatchingDialog::getScales | ( | std::vector< float > & | scales | ) | const |
Returns input scales.
Definition at line 166 of file CorrespondenceMatchingDialog.cpp.
References cloudViewer::utility::floor(), and QtCompat::SkipEmptyParts.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getSceneSearchRadius | ( | ) | const |
Returns the Scene Search Radius.
Definition at line 122 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getShotDescriptorRadius | ( | ) | const |
Returns the Shot Descriptor Radius.
Definition at line 126 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| bool CorrespondenceMatchingDialog::getVerificationFlag | ( | ) | const |
Definition at line 114 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| float CorrespondenceMatchingDialog::getVoxelGridLeafSize | ( | ) | const |
Definition at line 158 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| bool CorrespondenceMatchingDialog::isGCActivated | ( | ) | const |
Definition at line 134 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::getParametersFromDialog().
| void CorrespondenceMatchingDialog::loadParamsFromPersistentSettings | ( | ) |
Loads parameters from persistent settings.
Definition at line 247 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatchingDialog().
|
protectedslot |
Definition at line 206 of file CorrespondenceMatchingDialog.cpp.
References validParameters().
Referenced by CorrespondenceMatchingDialog().
| void CorrespondenceMatchingDialog::refreshCloudComboBox | ( | ) |
Definition at line 50 of file CorrespondenceMatchingDialog.cpp.
References ecvMainAppInterface::dbRootObject(), ecvMainAppInterface::dispToConsole(), ecvMainAppInterface::ERR_CONSOLE_MESSAGE, ccHObject::filterChildren(), getEntityName(), m_app, name, and CV_TYPES::POINT_CLOUD.
Referenced by CorrespondenceMatching::openInputDialog().
| void CorrespondenceMatchingDialog::saveParamsToPersistentSettings | ( | ) |
Saves parameters to persistent settings.
Definition at line 286 of file CorrespondenceMatchingDialog.cpp.
Referenced by CorrespondenceMatching::openInputDialog().
|
protected |
Definition at line 89 of file CorrespondenceMatchingDialog.cpp.
Referenced by onCloudChanged().
|
protected |
Gives access to the application (data-base, UI, etc.)
Definition at line 77 of file CorrespondenceMatchingDialog.h.
Referenced by getEvaluationCloud(), getModel1Cloud(), getModel2Cloud(), and refreshCloudComboBox().