|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "ecvKDTreeFlann.h"#include <Logging.h>#include <nanoflann.hpp>#include "HalfEdgeTriangleMesh.h"#include "ecvHObjectCaster.h"#include "ecvMesh.h"#include "ecvPointCloud.h"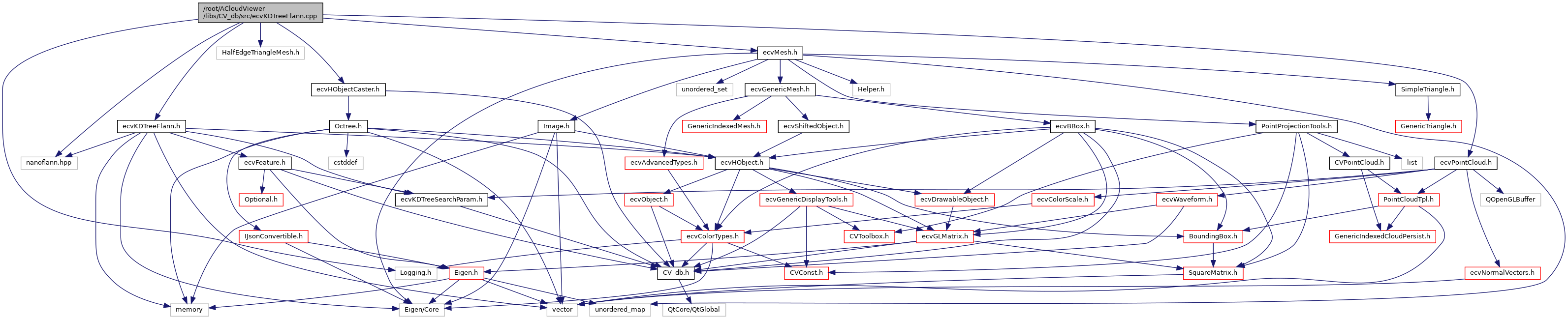
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::geometry | |
Functions | |
| template int | cloudViewer::geometry::KDTreeFlann::Search< Eigen::Vector3d > (const Eigen::Vector3d &query, const KDTreeSearchParam ¶m, std::vector< int > &indices, std::vector< double > &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::Query< Eigen::Vector3d > (const std::vector< Eigen::Vector3d > &queries, const KDTreeSearchParam ¶m, std::vector< std::vector< int >> &indices, std::vector< std::vector< double >> &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::SearchKNN< Eigen::Vector3d > (const Eigen::Vector3d &query, int knn, std::vector< int > &indices, std::vector< double > &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::SearchRadius< Eigen::Vector3d > (const Eigen::Vector3d &query, double radius, std::vector< int > &indices, std::vector< double > &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::SearchHybrid< Eigen::Vector3d > (const Eigen::Vector3d &query, double radius, int max_nn, std::vector< int > &indices, std::vector< double > &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::Search< Eigen::VectorXd > (const Eigen::VectorXd &query, const KDTreeSearchParam ¶m, std::vector< int > &indices, std::vector< double > &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::Query< Eigen::VectorXd > (const std::vector< Eigen::VectorXd > &queries, const KDTreeSearchParam ¶m, std::vector< std::vector< int >> &indices, std::vector< std::vector< double >> &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::SearchKNN< Eigen::VectorXd > (const Eigen::VectorXd &query, int knn, std::vector< int > &indices, std::vector< double > &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::SearchRadius< Eigen::VectorXd > (const Eigen::VectorXd &query, double radius, std::vector< int > &indices, std::vector< double > &distance2) const |
| template int | cloudViewer::geometry::KDTreeFlann::SearchHybrid< Eigen::VectorXd > (const Eigen::VectorXd &query, double radius, int max_nn, std::vector< int > &indices, std::vector< double > &distance2) const |