|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "ecvFeature.h"#include <Logging.h>#include <Parallel.h>#include "ecvKDTreeFlann.h"#include "ecvPointCloud.h"#include <Eigen/Dense>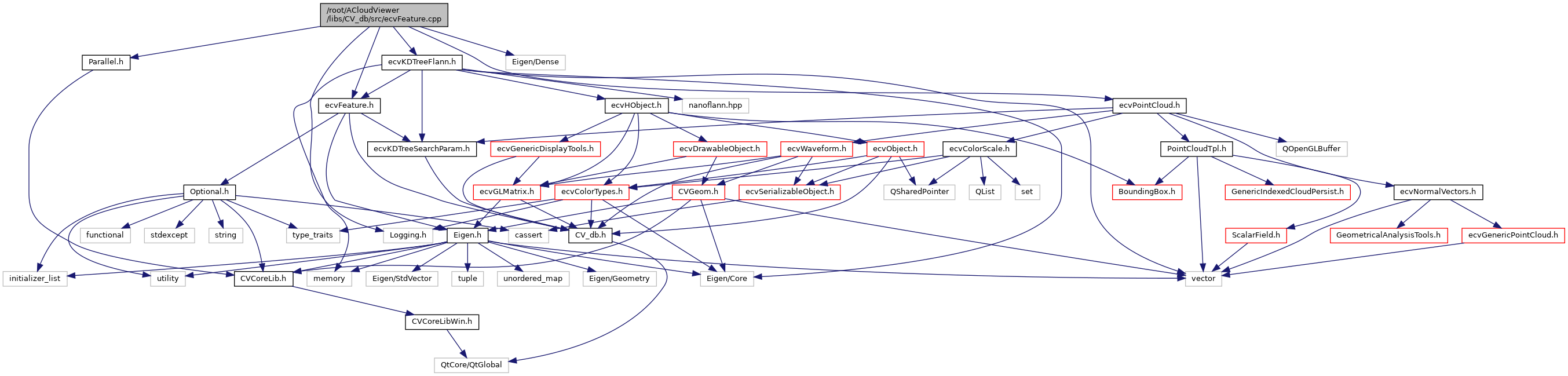
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::utility | |
Functions | |
| static Eigen::Vector4d | cloudViewer::utility::ComputePairFeatures (const Eigen::Vector3d &p1, const Eigen::Vector3d &n1, const Eigen::Vector3d &p2, const Eigen::Vector3d &n2) |
| static std::shared_ptr< Feature > | cloudViewer::utility::ComputeSPFHFeature (const ccPointCloud &input, const geometry::KDTreeFlann &kdtree, const geometry::KDTreeSearchParam &search_param, const utility::optional< std::vector< size_t >> &indices=utility::nullopt) |
| std::shared_ptr< Feature > | cloudViewer::utility::ComputeFPFHFeature (const ccPointCloud &input, const geometry::KDTreeSearchParam &search_param=geometry::KDTreeSearchParamKNN(), const utility::optional< std::vector< size_t >> &indices=utility::nullopt) |
| CorrespondenceSet | cloudViewer::utility::CorrespondencesFromFeatures (const Feature &source_features, const Feature &target_features, bool mutual_filter=false, float mutual_consistency_ratio=0.1) |
| Function to find correspondences via 1-nearest neighbor feature matching. Target is used to construct a nearest neighbor search object, in order to query source. More... | |