|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "VoxelGridIO.h"#include <FileSystem.h>#include <Logging.h>#include <rply.h>#include <unordered_map>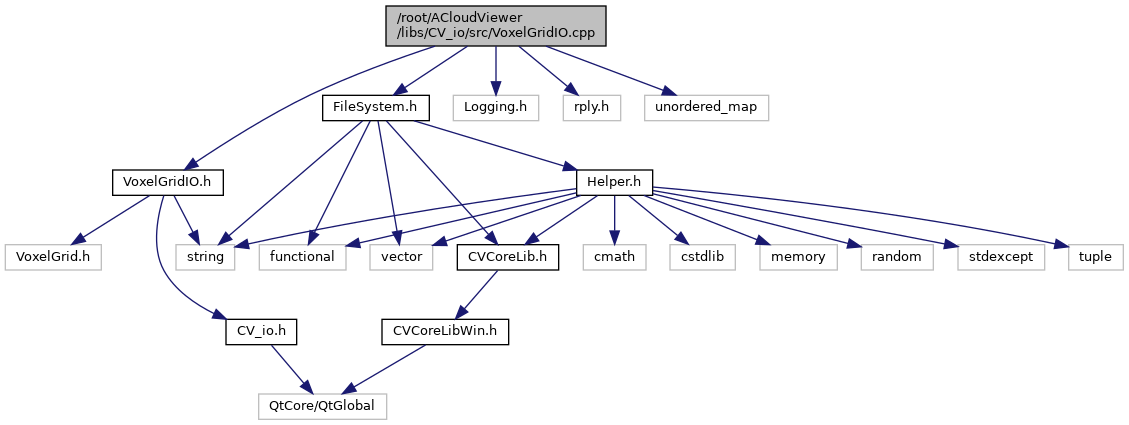
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::ply_voxelgrid_reader | |
| cloudViewer::io | |
Functions | |
| std::shared_ptr< geometry::VoxelGrid > | cloudViewer::io::CreateVoxelGridFromFile (const std::string &filename, const std::string &format="auto", bool print_progress=false) |
| bool | cloudViewer::io::ReadVoxelGrid (const std::string &filename, geometry::VoxelGrid &voxelgrid, const std::string &format="auto", bool print_progress=false) |
| bool | cloudViewer::io::WriteVoxelGrid (const std::string &filename, const geometry::VoxelGrid &voxelgrid, bool write_ascii=false, bool compressed=false, bool print_progress=false) |
| bool | cloudViewer::io::ReadVoxelGridFromPLY (const std::string &filename, geometry::VoxelGrid &voxelgrid, bool print_progress=false) |
| bool | cloudViewer::io::WriteVoxelGridToPLY (const std::string &filename, const geometry::VoxelGrid &voxelgrid, bool write_ascii=false, bool compressed=false, bool print_progress=false) |
| long color_index |
Definition at line 31 of file VoxelGridIO.cpp.
| long color_num |
Definition at line 32 of file VoxelGridIO.cpp.
| Eigen::Vector3d origin |
Definition at line 26 of file VoxelGridIO.cpp.
Referenced by pcl::visualization::ImageViewerInteractorStyle::adjustCamera(), call_zseek64(), cvSelectionPipeline::captureBuffersForFastPreSelection(), e57::BlobNodeImpl::checkLeavesInSet(), e57::FloatNodeImpl::checkLeavesInSet(), e57::IntegerNodeImpl::checkLeavesInSet(), e57::ScaledIntegerNodeImpl::checkLeavesInSet(), e57::StringNodeImpl::checkLeavesInSet(), e57::StructureNodeImpl::checkLeavesInSet(), cloudViewer::MeshSamplingTools::computeMeshVolume(), ConvertToGroup(), ccMesh::CreateCoordinateFrame(), cloudViewer::t::geometry::TriangleMesh::CreateCoordinateFrame(), cloudViewer::geometry::VoxelGrid::CreateDense(), cloudViewer::geometry::Line3D::ExactAABB(), ccPropertiesTreeDelegate::fillWithCoordinateSystem(), cloudViewer::geometry::Segment3D::GetBoundingBox(), GetConeProfile(), DistanceMapGenerationTool::GetPoylineOrigin(), PclUtils::PCLVis::getTransformation(), cloudViewer::geometry::Octree::IsPointInBound(), ProfileLoader::Load(), PcdFilter::loadFile(), qSRA::loadProfile(), cloudViewer::geometry::Segment3D::MidPoint(), cvCutFilter::onOriginChanged(), cvHardwareSelector::PrepareSelect(), cloudViewer::geometry::Line3D::ProjectionParameter(), qiodevice64_seek_file_func(), qiodevice_seek_file_func(), e57::NodeImpl::relativePathName(), cvCutFilter::resetPlaneWidget(), vtkBoundedVolumeSource::SetImageParameters(), cvCutFilter::setOrigin(), DistanceMapGenerationTool::SetPoylineOrigin(), QCPAxisTicker::setTickOrigin(), QCPAxisTickerDateTime::setTickOrigin(), cloudViewer::geometry::Line3D::SlabAABBBase(), PclUtils::PCLVis::transformEntities(), and DistanceMapGenerationDlg::updateProfileOrigin().
| cloudViewer::utility::ConsoleProgressBar* progress_bar |
Definition at line 24 of file VoxelGridIO.cpp.
| Eigen::Matrix3d rotation |
Definition at line 27 of file VoxelGridIO.cpp.
Referenced by PclUtils::PCLVis::addOrientedCube(), DistanceMapGenerationTool::ProfileMetaData::computeCloudToSurfaceOriginTrans(), colmap::GR6PEstimator::Estimate(), ccSensor::getActiveAbsoluteRotation(), cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinOBB(), cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinOBBCPU(), ccHObject::GetRotationMatrixFromAxisAngle(), ccHObject::GetRotationMatrixFromEulerAngle(), ccHObject::GetRotationMatrixFromQuaternion(), ccHObject::GetRotationMatrixFromXYZ(), ccHObject::GetRotationMatrixFromXZY(), ccHObject::GetRotationMatrixFromYXZ(), ccHObject::GetRotationMatrixFromYZX(), ccHObject::GetRotationMatrixFromZXY(), ccHObject::GetRotationMatrixFromZYX(), ccCompass::importFoliations(), ccCompassImport::importFoliations(), e57::WriterImpl::NewImage2D(), e57::RigidBodyTransform::operator==(), cloudViewer::t::geometry::OrientedBoundingBox::OrientedBoundingBox(), CommandICP::process(), e57::ReaderImpl::ReadData3D(), e57::ReaderImpl::ReadImage2D(), cloudViewer::t::geometry::OrientedBoundingBox::Rotate(), SavePoseInformation(), cloudViewer::visualization::rendering::FilamentScene::SetIndirectLightRotation(), cloudViewer::t::geometry::OrientedBoundingBox::SetRotation(), ecvOrientedBBox::Transform(), GrainsAsEllipsoids::updateMeshAndLineSet(), ccPlaneEditDlg::updatePlane(), and cloudViewer::visualization::webrtc_server::VideoScaler::VideoScaler().
| long voxel_index |
Definition at line 29 of file VoxelGridIO.cpp.
Referenced by cloudViewer::ml::impl::_VoxelPooling(), cloudViewer::ml::impl::_VoxelPoolingBackprop(), cloudViewer::geometry::AvgColorVoxel::Add(), cloudViewer::core::nns::ComputeVoxelIndex(), cloudViewer::ml::impl::ComputeVoxelIndex(), cloudViewer::geometry::VoxelGrid::CreateFromPointCloudWithinBounds(), cloudViewer::geometry::VoxelGrid::operator+=(), ccPointCloud::VoxelDownSample(), and ccPointCloud::VoxelDownSampleAndTrace().
| long voxel_num |
Definition at line 30 of file VoxelGridIO.cpp.
| double voxel_size |
Definition at line 28 of file VoxelGridIO.cpp.
Referenced by cloudViewer::ml::impl::_VoxelPooling(), cloudViewer::ml::impl::_VoxelPoolingBackprop(), cloudViewer::ml::impl::CheckVoxelSize(), convert(), cloudViewer::geometry::VoxelGrid::CreateDense(), cloudViewer::geometry::VoxelGrid::CreateFromPointCloud(), cloudViewer::geometry::VoxelGrid::CreateFromPointCloudWithinBounds(), cloudViewer::geometry::VoxelGrid::CreateFromTriangleMesh(), cloudViewer::geometry::VoxelGrid::CreateFromTriangleMeshWithinBounds(), cloudViewer::t::geometry::kernel::voxel_grid::DepthTouch(), cloudViewer::t::geometry::kernel::voxel_grid::DepthTouchCPU(), cloudViewer::t::geometry::EstimateNormals(), cloudViewer::t::geometry::kernel::voxel_grid::EstimateRange(), cloudViewer::t::geometry::kernel::voxel_grid::EstimateRangeCPU(), cloudViewer::t::geometry::kernel::voxel_grid::ExtractPointCloud(), cloudViewer::t::geometry::kernel::voxel_grid::ExtractPointCloudCPU(), cloudViewer::t::geometry::kernel::voxel_grid::ExtractTriangleMesh(), cloudViewer::t::geometry::kernel::voxel_grid::ExtractTriangleMeshCPU(), cloudViewer::t::geometry::kernel::voxel_grid::GetVoxelCoordinatesAndFlattenedIndices(), cloudViewer::t::geometry::kernel::voxel_grid::GetVoxelCoordinatesAndFlattenedIndicesCPU(), cloudViewer::t::pipelines::registration::ICP(), cloudViewer::t::geometry::kernel::voxel_grid::Integrate(), cloudViewer::t::geometry::kernel::voxel_grid::IntegrateCPU(), cloudViewer::t::geometry::LegacyEstimateNormals(), cloudViewer::t::geometry::LegacyVoxelDownSample(), cloudViewer::t::geometry::VoxelBlockGrid::Load(), main(), cloudViewer::t::geometry::kernel::voxel_grid::PointCloudTouch(), cloudViewer::t::geometry::kernel::voxel_grid::PointCloudTouchCPU(), cloudViewer::t::geometry::kernel::voxel_grid::RayCast(), cloudViewer::t::geometry::kernel::voxel_grid::RayCastCPU(), ccMesh::SimplifyVertexClustering(), cloudViewer::t::pipelines::slac::SLACOptimizerParams::SLACOptimizerParams(), cloudViewer::t::geometry::VoxelBlockGrid::VoxelBlockGrid(), cloudViewer::t::geometry::VoxelDownSample(), ccPointCloud::VoxelDownSample(), cloudViewer::t::geometry::PointCloud::VoxelDownSample(), ccPointCloud::VoxelDownSampleAndTrace(), and cloudViewer::ml::impl::VoxelizeCPU().
| std::vector<geometry::Voxel>* voxelgrid_ptr |
Definition at line 25 of file VoxelGridIO.cpp.
Referenced by main().