|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <Logging.h>#include <Eigen/Dense>#include <algorithm>#include <iterator>#include <numeric>#include <random>#include <unordered_set>#include "ecvMesh.h"#include "ecvPointCloud.h"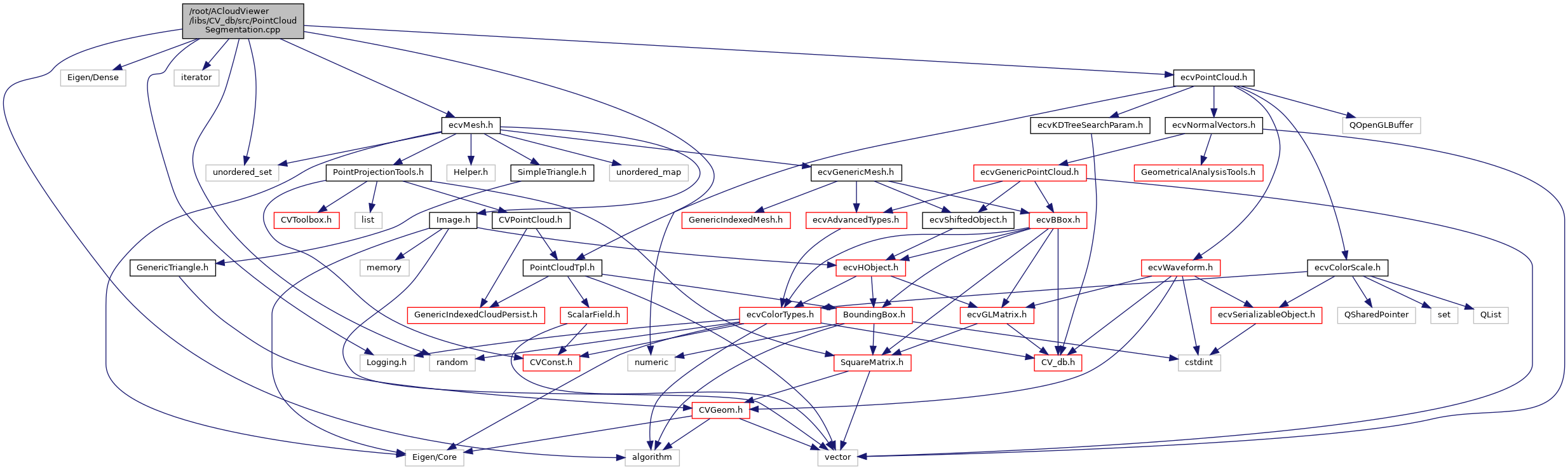
Go to the source code of this file.
Classes | |
| class | cloudViewer::geometry::RANSACResult |
| Stores the current best result in the RANSAC algorithm. More... | |
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::geometry | |
Functions | |
| RANSACResult | cloudViewer::geometry::EvaluateRANSACBasedOnDistance (const std::vector< CCVector3 > &points, const Eigen::Vector4d plane_model, std::vector< size_t > &inliers, double distance_threshold, double error) |
| RANSACResult | cloudViewer::geometry::EvaluateRANSACBasedOnDistance (const std::vector< Eigen::Vector3d > &points, const Eigen::Vector4d plane_model, std::vector< size_t > &inliers, double distance_threshold, double error) |
| Eigen::Vector4d | cloudViewer::geometry::GetPlaneFromPoints (const std::vector< CCVector3 > &points, const std::vector< size_t > &inliers) |
| Eigen::Vector4d | cloudViewer::geometry::GetPlaneFromPoints (const std::vector< Eigen::Vector3d > &points, const std::vector< size_t > &inliers) |