|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <Eigen.h>#include <Optional.h>#include <Eigen/Core>#include <tuple>#include <vector>#include "pipelines/registration/CorrespondenceChecker.h"#include "pipelines/registration/TransformationEstimation.h"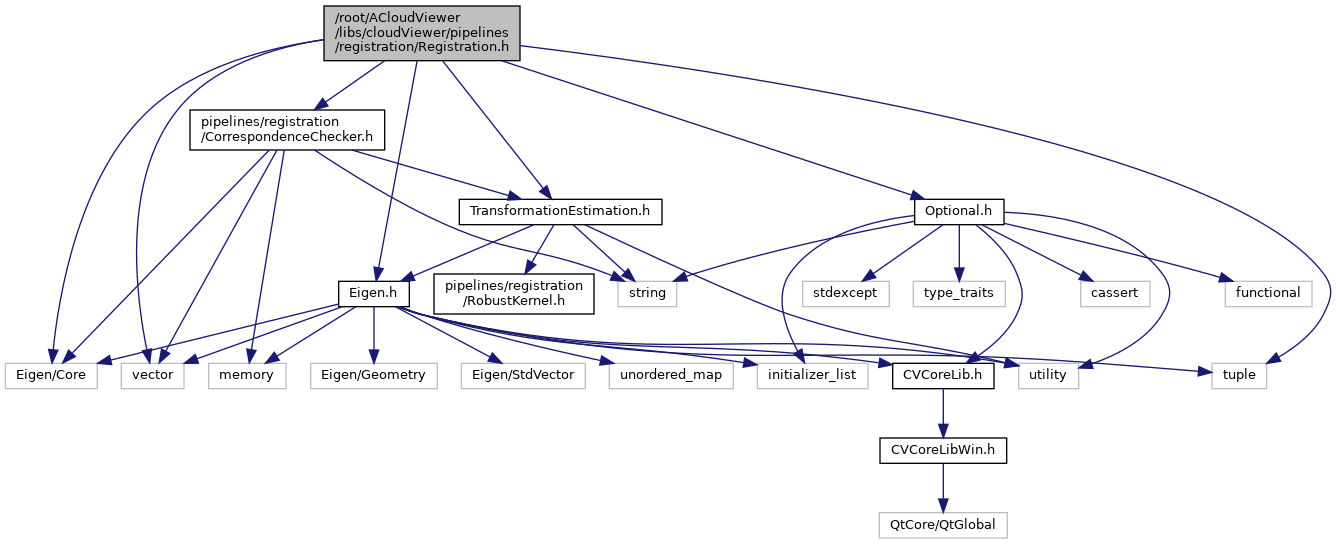
Go to the source code of this file.
Classes | |
| class | cloudViewer::pipelines::registration::ICPConvergenceCriteria |
| Class that defines the convergence criteria of ICP. More... | |
| class | cloudViewer::pipelines::registration::RANSACConvergenceCriteria |
| Class that defines the convergence criteria of RANSAC. More... | |
| class | cloudViewer::pipelines::registration::RegistrationResult |
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::utility | |
| cloudViewer::pipelines | |
| cloudViewer::pipelines::registration | |
Functions | |
| RegistrationResult | cloudViewer::pipelines::registration::EvaluateRegistration (const ccPointCloud &source, const ccPointCloud &target, double max_correspondence_distance, const Eigen::Matrix4d &transformation=Eigen::Matrix4d::Identity()) |
| Function for evaluating registration between point clouds. More... | |
| RegistrationResult | cloudViewer::pipelines::registration::RegistrationICP (const ccPointCloud &source, const ccPointCloud &target, double max_correspondence_distance, const Eigen::Matrix4d &init=Eigen::Matrix4d::Identity(), const TransformationEstimation &estimation=TransformationEstimationPointToPoint(false), const ICPConvergenceCriteria &criteria=ICPConvergenceCriteria()) |
| Functions for ICP registration. More... | |
| RegistrationResult | cloudViewer::pipelines::registration::RegistrationRANSACBasedOnCorrespondence (const ccPointCloud &source, const ccPointCloud &target, const CorrespondenceSet &corres, double max_correspondence_distance, const TransformationEstimation &estimation=TransformationEstimationPointToPoint(false), int ransac_n=3, const std::vector< std::reference_wrapper< const CorrespondenceChecker >> &checkers={}, const RANSACConvergenceCriteria &criteria=RANSACConvergenceCriteria(), utility::optional< unsigned int > seed=utility::nullopt) |
| Function for global RANSAC registration based on a given set of correspondences. More... | |
| RegistrationResult | cloudViewer::pipelines::registration::RegistrationRANSACBasedOnFeatureMatching (const ccPointCloud &source, const ccPointCloud &target, const utility::Feature &source_feature, const utility::Feature &target_feature, bool mutual_filter, double max_correspondence_distance, const TransformationEstimation &estimation=TransformationEstimationPointToPoint(false), int ransac_n=3, const std::vector< std::reference_wrapper< const CorrespondenceChecker >> &checkers={}, const RANSACConvergenceCriteria &criteria=RANSACConvergenceCriteria(), utility::optional< unsigned int > seed=utility::nullopt) |
| Function for global RANSAC registration based on feature matching. More... | |
| Eigen::Matrix6d | cloudViewer::pipelines::registration::GetInformationMatrixFromPointClouds (const ccPointCloud &source, const ccPointCloud &target, double max_correspondence_distance, const Eigen::Matrix4d &transformation) |