|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "ecvPoissonReconDlg.h"#include "ecvEntityAction.h"#include <ecvHObjectCaster.h>#include <ecvMesh.h>#include <ecvPointCloud.h>#include <QDialog>#include <QInputDialog>#include <QMainWindow>#include <QMessageBox>#include <QProgressDialog>#include <QtConcurrentRun>#include <QtCore>#include <QtGui>#include <time.h>#include <unistd.h>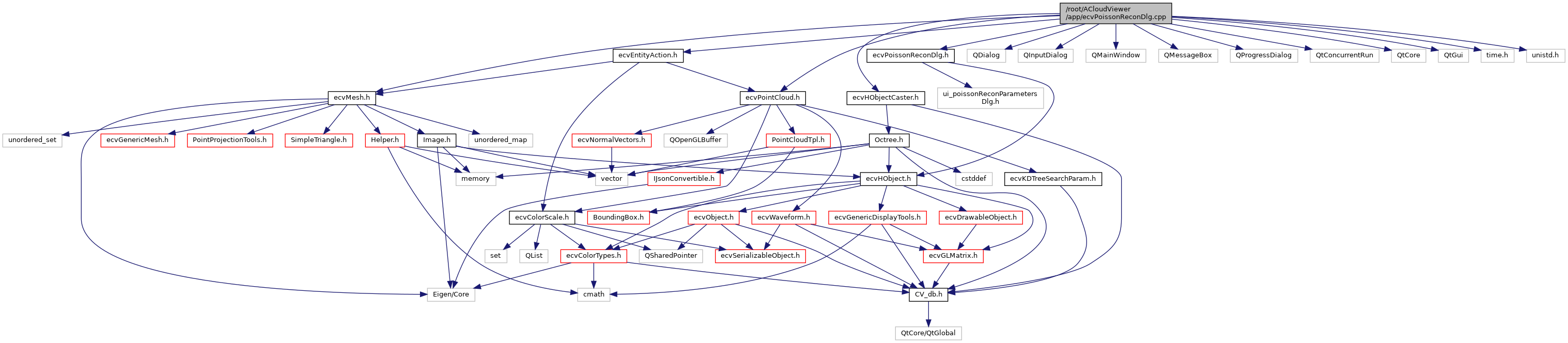
Go to the source code of this file.
Classes | |
| struct | Parameters |
| Algorithm parameters. More... | |
Functions | |
| bool | doReconstruct () |
Variables | |
| static double | s_defaultResolution = 0.0 |
| static bool | s_depthMode = true |
| static ccPointCloud * | s_cloud = nullptr |
| static ccMesh * | s_mesh = nullptr |
| static std::vector< double > | s_density |
| static Parameters | s_params |
| bool doReconstruct | ( | ) |
Definition at line 150 of file ecvPoissonReconDlg.cpp.
References Parameters::boundary, ccMesh::CreateFromPointCloudPoisson(), Parameters::density, Parameters::depth, Parameters::finestCellWidth, ccMesh::IsEmpty(), Parameters::linearFit, Parameters::pointWeight, result, s_cloud, s_density, s_mesh, s_params, Parameters::samplesPerNode, and Parameters::scale.
Referenced by ecvPoissonReconDlg::doComputation().
|
static |
Definition at line 37 of file ecvPoissonReconDlg.cpp.
Referenced by ecvPoissonReconDlg::doComputation(), doReconstruct(), and ecvPoissonReconDlg::start().
|
static |
Definition at line 35 of file ecvPoissonReconDlg.cpp.
Referenced by ecvPoissonReconDlg::adjustParams(), qPoissonRecon::doAction(), and ecvPoissonReconDlg::updateParams().
|
static |
Definition at line 40 of file ecvPoissonReconDlg.cpp.
Referenced by doReconstruct(), and ecvPoissonReconDlg::start().
|
static |
Definition at line 36 of file ecvPoissonReconDlg.cpp.
Referenced by ecvPoissonReconDlg::adjustParams(), qPoissonRecon::doAction(), ecvPoissonReconDlg::doComputation(), and ecvPoissonReconDlg::updateParams().
|
static |
Definition at line 38 of file ecvPoissonReconDlg.cpp.
Referenced by doReconstruct(), and ecvPoissonReconDlg::start().
|
static |
Definition at line 148 of file ecvPoissonReconDlg.cpp.
Referenced by ecvPoissonReconDlg::adjustParams(), ecvPoissonReconDlg::doComputation(), doReconstruct(), ecvPoissonReconDlg::start(), and ecvPoissonReconDlg::updateParams().