|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <Device.h>
Public Member Functions | |
| IsDevice ()=default | |
| virtual | ~IsDevice ()=default |
| virtual core::Device | GetDevice () const =0 |
| bool | IsCPU () const |
| bool | IsCUDA () const |
| bool | IsSYCL () const |
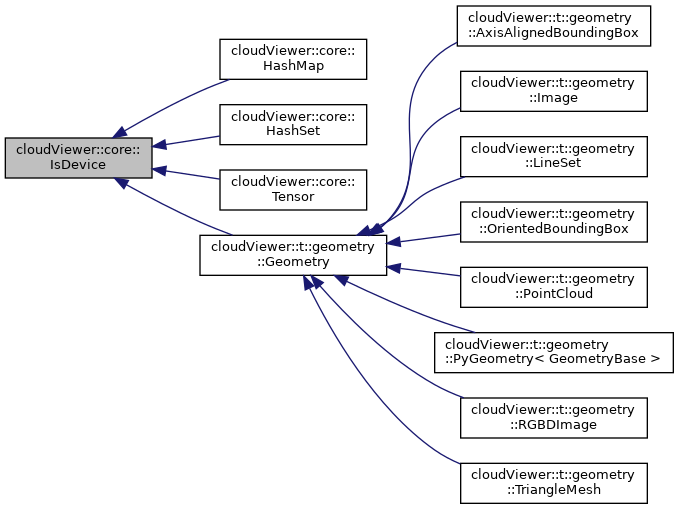
Abstract class to provide IsXXX() functionality to check device location. Need to implement GetDevice().
|
default |
|
virtualdefault |
|
pure virtual |
Implemented in cloudViewer::t::geometry::PyGeometry< GeometryBase >, cloudViewer::t::geometry::TriangleMesh, cloudViewer::t::geometry::RGBDImage, cloudViewer::t::geometry::PointCloud, cloudViewer::t::geometry::LineSet, cloudViewer::t::geometry::Image, cloudViewer::t::geometry::OrientedBoundingBox, cloudViewer::t::geometry::AxisAlignedBoundingBox, cloudViewer::core::Tensor, cloudViewer::core::HashSet, cloudViewer::core::HashMap, and cloudViewer::t::geometry::Geometry.
|
inline |
Definition at line 95 of file Device.h.
References cloudViewer::core::Device::CPU, GetDevice(), and cloudViewer::core::Device::GetType().
Referenced by cloudViewer::core::kernel::BinaryEW(), cloudViewer::t::geometry::PointCloud::ComputeBoundaryPoints(), cloudViewer::t::pipelines::kernel::ComputeFPFHFeature(), cloudViewer::t::pipelines::kernel::ComputeInformationMatrix(), cloudViewer::t::geometry::PointCloud::ComputeMetrics(), cloudViewer::t::geometry::TriangleMesh::ComputeMetrics(), cloudViewer::t::pipelines::kernel::ComputePoseColoredICP(), cloudViewer::t::pipelines::kernel::ComputePosePointToPlane(), cloudViewer::t::pipelines::kernel::ComputeRtPointToPoint(), cloudViewer::t::geometry::ComputeTriangleAreasHelper(), cloudViewer::t::geometry::TriangleMesh::ComputeTriangleNormals(), cloudViewer::t::geometry::TriangleMesh::ComputeVertexNormals(), cloudViewer::t::geometry::Image::Dilate(), cloudViewer::t::geometry::PointCloud::EstimateColorGradients(), cloudViewer::t::geometry::PointCloud::EstimateNormals(), cloudViewer::t::geometry::kernel::voxel_grid::EstimateRange(), cloudViewer::t::geometry::kernel::voxel_grid::ExtractPointCloud(), cloudViewer::t::geometry::kernel::voxel_grid::ExtractTriangleMesh(), cloudViewer::t::pipelines::kernel::FillInRigidAlignmentTerm(), cloudViewer::t::pipelines::kernel::FillInSLACAlignmentTerm(), cloudViewer::t::pipelines::kernel::FillInSLACRegularizerTerm(), cloudViewer::t::geometry::Image::Filter(), cloudViewer::t::geometry::Image::FilterBilateral(), cloudViewer::t::geometry::Image::FilterGaussian(), cloudViewer::t::geometry::Image::FilterSobel(), cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinAABB(), cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinOBB(), cloudViewer::t::geometry::kernel::voxel_grid::GetVoxelCoordinatesAndFlattenedIndices(), cloudViewer::core::kernel::IndexAdd_(), cloudViewer::core::kernel::IndexGet(), cloudViewer::core::kernel::IndexSet(), cloudViewer::t::geometry::kernel::voxel_grid::Integrate(), cloudViewer::core::kernel::NonZero(), cloudViewer::t::geometry::PointCloud::NormalizeNormals(), cloudViewer::t::geometry::TriangleMesh::NormalizeNormals(), cloudViewer::t::geometry::PointCloud::OrientNormalsToAlignWithDirection(), cloudViewer::t::geometry::PointCloud::OrientNormalsTowardsCameraLocation(), cloudViewer::t::geometry::kernel::pointcloud::Project(), cloudViewer::t::geometry::TriangleMesh::ProjectImagesToAlbedo(), cloudViewer::core::pybind_core_hashmap(), cloudViewer::core::pybind_core_hashset(), cloudViewer::core::pybind_core_tensor(), cloudViewer::t::geometry::pybind_geometry_class(), cloudViewer::t::geometry::pybind_image(), cloudViewer::core::kernel::Reduction(), cloudViewer::t::geometry::Image::Resize(), cloudViewer::t::geometry::Image::RGBToGray(), cloudViewer::t::geometry::TriangleMesh::SamplePointsUniformly(), cloudViewer::core::TensorToPyArray(), cloudViewer::t::geometry::Image::To(), and cloudViewer::t::geometry::kernel::pointcloud::Unproject().
|
inline |
Definition at line 99 of file Device.h.
References cloudViewer::core::Device::CUDA, GetDevice(), and cloudViewer::core::Device::GetType().
Referenced by cloudViewer::core::kernel::BinaryEW(), cloudViewer::t::geometry::PointCloud::ComputeBoundaryPoints(), cloudViewer::t::pipelines::kernel::ComputeInformationMatrix(), cloudViewer::t::pipelines::kernel::ComputePoseColoredICP(), cloudViewer::t::pipelines::kernel::ComputePosePointToPlane(), cloudViewer::t::pipelines::kernel::ComputeRtPointToPoint(), cloudViewer::t::geometry::ComputeTriangleAreasHelper(), cloudViewer::t::geometry::TriangleMesh::ComputeTriangleNormals(), cloudViewer::t::geometry::TriangleMesh::ComputeVertexNormals(), cloudViewer::t::geometry::CreatePointCloudWithNormals(), cloudViewer::t::geometry::Image::Dilate(), cloudViewer::t::geometry::PointCloud::EstimateColorGradients(), cloudViewer::t::geometry::PointCloud::EstimateNormals(), cloudViewer::t::geometry::kernel::voxel_grid::EstimateRange(), cloudViewer::t::geometry::kernel::voxel_grid::ExtractPointCloud(), cloudViewer::t::geometry::kernel::voxel_grid::ExtractTriangleMesh(), cloudViewer::t::pipelines::kernel::FillInRigidAlignmentTerm(), cloudViewer::t::pipelines::kernel::FillInSLACAlignmentTerm(), cloudViewer::t::pipelines::kernel::FillInSLACRegularizerTerm(), cloudViewer::t::geometry::Image::Filter(), cloudViewer::t::geometry::Image::FilterBilateral(), cloudViewer::t::geometry::Image::FilterGaussian(), cloudViewer::t::geometry::Image::FilterSobel(), cloudViewer::core::nns::NearestNeighborSearch::FixedRadiusIndex(), cloudViewer::core::nns::NearestNeighborSearch::FixedRadiusSearch(), cloudViewer::core::HashBackendBuffer::GetHeapTopIndex(), cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinAABB(), cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinOBB(), cloudViewer::t::geometry::kernel::voxel_grid::GetVoxelCoordinatesAndFlattenedIndices(), cloudViewer::core::nns::NearestNeighborSearch::HybridIndex(), cloudViewer::core::nns::NearestNeighborSearch::HybridSearch(), cloudViewer::core::kernel::IndexAdd_(), cloudViewer::core::kernel::IndexGet(), cloudViewer::core::kernel::IndexSet(), cloudViewer::t::geometry::kernel::voxel_grid::Integrate(), cloudViewer::core::nns::NearestNeighborSearch::KnnIndex(), cloudViewer::core::nns::NearestNeighborSearch::KnnSearch(), cloudViewer::core::kernel::NonZero(), cloudViewer::t::geometry::PointCloud::NormalizeNormals(), cloudViewer::t::geometry::TriangleMesh::NormalizeNormals(), cloudViewer::t::geometry::PointCloud::OrientNormalsToAlignWithDirection(), cloudViewer::t::geometry::PointCloud::OrientNormalsTowardsCameraLocation(), cloudViewer::t::geometry::kernel::pointcloud::Project(), cloudViewer::core::pybind_core_hashmap(), cloudViewer::core::pybind_core_hashset(), cloudViewer::core::pybind_core_tensor(), cloudViewer::t::geometry::pybind_geometry_class(), cloudViewer::core::kernel::Reduction(), cloudViewer::t::geometry::Image::Resize(), cloudViewer::t::geometry::Image::RGBToGray(), cloudViewer::core::nns::KnnIndex::SetTensorData(), cloudViewer::core::Tensor::ToString(), and cloudViewer::t::geometry::kernel::pointcloud::Unproject().
|
inline |
Definition at line 103 of file Device.h.
References GetDevice(), cloudViewer::core::Device::GetType(), and cloudViewer::core::Device::SYCL.
Referenced by cloudViewer::core::kernel::BinaryEW(), cloudViewer::core::kernel::CopySYCL(), cloudViewer::core::kernel::IndexAdd_(), cloudViewer::core::kernel::IndexGet(), cloudViewer::core::kernel::IndexSet(), cloudViewer::core::kernel::NonZero(), cloudViewer::core::kernel::Reduction(), and cloudViewer::core::Tensor::ToString().