|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "io/rpc/RemoteFunctions.h"#include <Logging.h>#include <ecvHObjectCaster.h>#include <Eigen/Geometry>#include <zmq.hpp>#include "core/Dispatch.h"#include "io/rpc/Connection.h"#include "io/rpc/MessageUtils.h"#include "io/rpc/Messages.h"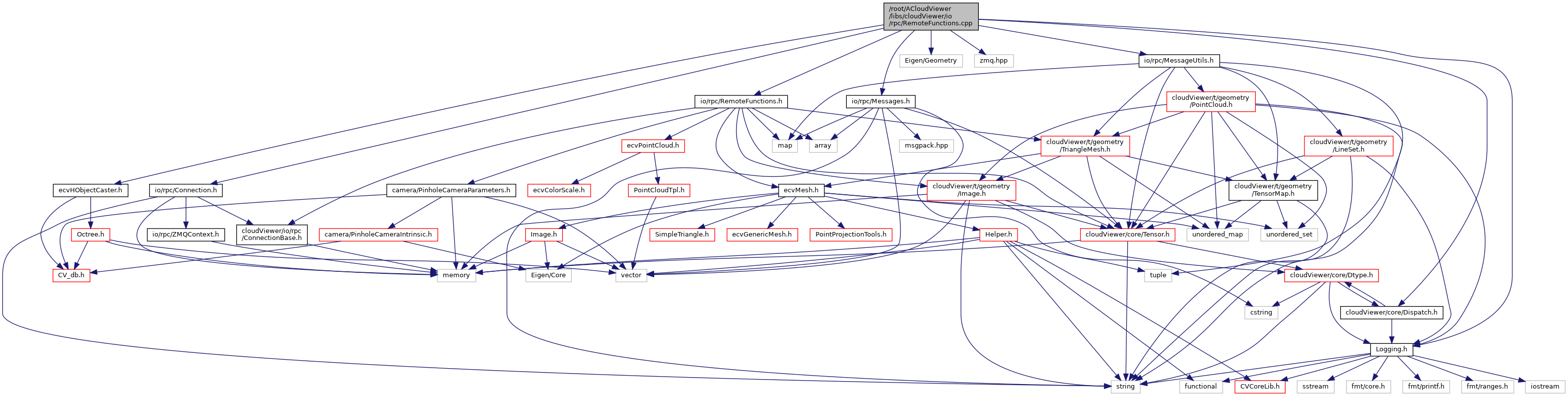
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::io | |
| cloudViewer::io::rpc | |
Functions | |
| bool | cloudViewer::io::rpc::SetPointCloud (const ccPointCloud &pcd, const std::string &path, int time, const std::string &layer, std::shared_ptr< ConnectionBase > connection) |
| bool | cloudViewer::io::rpc::SetTriangleMesh (const ccMesh &mesh, const std::string &path, int time, const std::string &layer, std::shared_ptr< ConnectionBase > connection) |
| bool | cloudViewer::io::rpc::SetTriangleMesh (const t::geometry::TriangleMesh &mesh, const std::string &path, int time, const std::string &layer, std::shared_ptr< ConnectionBase > connection) |
| bool | cloudViewer::io::rpc::SetMeshData (const std::string &path, int time, const std::string &layer, const core::Tensor &vertices, const std::map< std::string, core::Tensor > &vertex_attributes, const core::Tensor &faces, const std::map< std::string, core::Tensor > &face_attributes, const core::Tensor &lines, const std::map< std::string, core::Tensor > &line_attributes, const std::string &material, const std::map< std::string, float > &material_scalar_attributes, const std::map< std::string, std::array< float, 4 >> &material_vector_attributes, const std::map< std::string, t::geometry::Image > &texture_maps, const std::string &o3d_type, std::shared_ptr< ConnectionBase > connection) |
| bool | cloudViewer::io::rpc::SetLegacyCamera (const camera::PinholeCameraParameters &camera, const std::string &path, int time, const std::string &layer, std::shared_ptr< ConnectionBase > connection) |
| bool | cloudViewer::io::rpc::SetTime (int time, std::shared_ptr< ConnectionBase > connection) |
| bool | cloudViewer::io::rpc::SetActiveCamera (const std::string &path, std::shared_ptr< ConnectionBase > connection) |