|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "cloudViewer/t/geometry/kernel/MinimumOBB.h"#include <Eigen/src/Core/Matrix.h>#include "cloudViewer/core/EigenConverter.h"#include "cloudViewer/core/TensorCheck.h"#include "cloudViewer/t/geometry/BoundingVolume.h"#include "cloudViewer/t/geometry/PointCloud.h"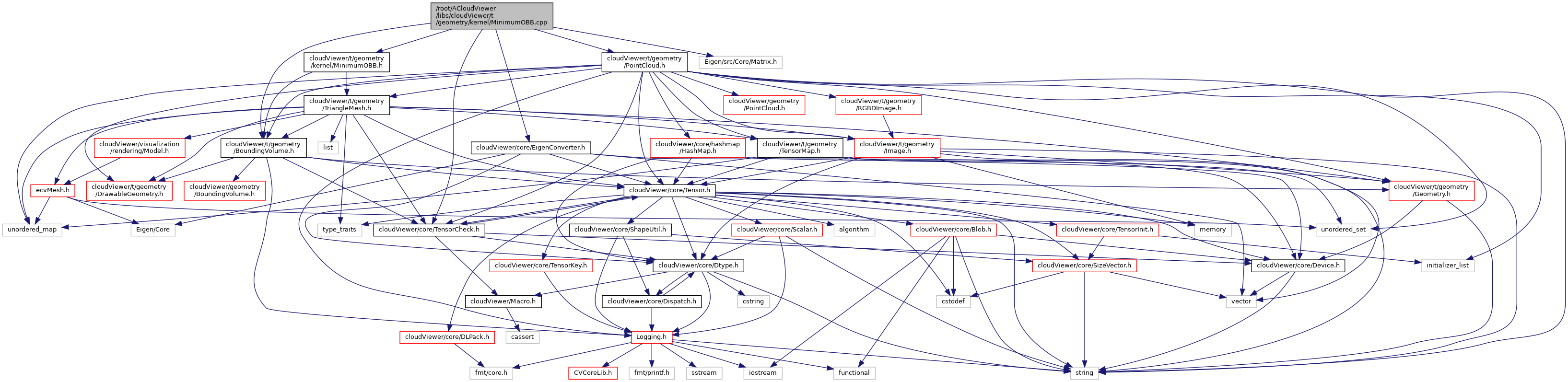
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::t | |
| cloudViewer::t::geometry | |
| cloudViewer::t::geometry::kernel | |
| cloudViewer::t::geometry::kernel::minimum_obb | |
Functions | |
| OrientedBoundingBox | cloudViewer::t::geometry::kernel::minimum_obb::ComputeMinimumOBBJylanki (const core::Tensor &points_, bool robust) |
| OrientedBoundingBox | cloudViewer::t::geometry::kernel::minimum_obb::ComputeMinimumOBBApprox (const core::Tensor &points, bool robust) |
| Eigen::Vector3d center_ |
Definition at line 51 of file MinimumOBB.cpp.
Referenced by cloudViewer::OrientedBoundingBox::getCenter(), and cloudViewer::OrientedBoundingBox::GetPosition().
| Eigen::Vector3d extent_ |
Definition at line 50 of file MinimumOBB.cpp.
Referenced by cloudViewer::OrientedBoundingBox::GetExtent(), and cloudViewer::OrientedBoundingBox::GetMaxExtent().
| Eigen::Matrix3d R_ |
Definition at line 49 of file MinimumOBB.cpp.
Referenced by cloudViewer::OrientedBoundingBox::GetRotation().