|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
Data structures for E57 Simple API. More...
#include "E57Format.h"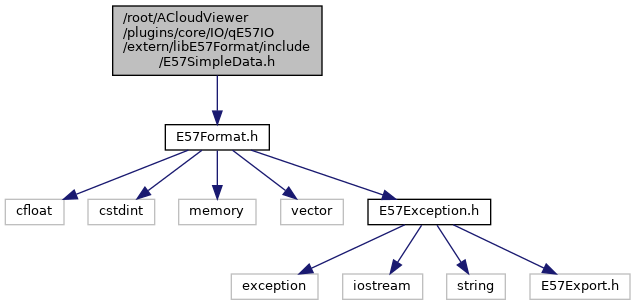
Go to the source code of this file.
Classes | |
| struct | e57::Translation |
| Defines a rigid body translation in Cartesian coordinates. More... | |
| struct | e57::Quaternion |
| Represents a rigid body rotation. More... | |
| struct | e57::RigidBodyTransform |
| Defines a rigid body transform in cartesian coordinates. More... | |
| struct | e57::CartesianBounds |
| Specifies an axis-aligned box in local cartesian coordinates. More... | |
| struct | e57::SphericalBounds |
| Stores the bounds of some data in spherical coordinates. More... | |
| struct | e57::IndexBounds |
| Stores the minimum and maximum of rowIndex, columnIndex, and returnIndex fields for a set of points. More... | |
| struct | e57::IntensityLimits |
| Specifies the limits for the value of signal intensity that a sensor is capable of producing. More... | |
| struct | e57::ColorLimits |
| Specifies the limits for the value of red, green, and blue color that a sensor is capable of producing. More... | |
| struct | e57::DateTime |
| Encodes date and time. More... | |
| struct | e57::E57Root |
| Stores the top-level information for the XML section of the file. More... | |
| struct | e57::LineGroupRecord |
| Stores information about a single group of points in a row or column. More... | |
| struct | e57::GroupingByLine |
| Stores a set of point groups organized by the rowIndex or columnIndex attribute of the PointRecord. More... | |
| struct | e57::PointGroupingSchemes |
| Supports the division of points within an Data3D into logical groupings. More... | |
| struct | e57::PointStandardizedFieldsAvailable |
| Used to interrogate if standardized fields are available. More... | |
| struct | e57::Data3D |
| Stores the top-level information for a single lidar scan. More... | |
| struct | e57::Data3DPointsData_t< COORDTYPE > |
| Stores pointers to user-provided buffers. More... | |
| struct | e57::VisualReferenceRepresentation |
| Stores an image that is to be used only as a visual reference. More... | |
| struct | e57::PinholeRepresentation |
| Stores an image that is mapped from 3D using the pinhole camera projection model. More... | |
| struct | e57::SphericalRepresentation |
| Stores an image that is mapped from 3D using a spherical projection model. More... | |
| struct | e57::CylindricalRepresentation |
| Stores an image that is mapped from 3D using a cylindrical projection model. More... | |
| struct | e57::Image2D |
| Stores an image from a camera. More... | |
Namespaces | |
| e57 | |
Typedefs | |
| typedef Data3DPointsData_t< float > | e57::Data3DPointsData |
| typedef Data3DPointsData_t< double > | e57::Data3DPointsData_d |
Enumerations | |
| enum | e57::Image2DType { e57::E57_NO_IMAGE = 0 , e57::E57_JPEG_IMAGE = 1 , e57::E57_PNG_IMAGE = 2 , e57::E57_PNG_IMAGE_MASK = 3 } |
| Identifies the format representation for the image data. More... | |
| enum | e57::Image2DProjection { e57::E57_NO_PROJECTION = 0 , e57::E57_VISUAL = 1 , e57::E57_PINHOLE = 2 , e57::E57_SPHERICAL = 3 , e57::E57_CYLINDRICAL = 4 } |
| Identifies the representation for the image data. More... | |
Variables | |
| constexpr double | e57::E57_NOT_SCALED_USE_FLOAT = 0. |
| Indicates to use FloatNode instead of ScaledIntegerNode in fields that can use both. More... | |
| constexpr double | e57::E57_NOT_SCALED_USE_INTEGER = -1. |
| Indicates to use ScaledIntegerNode insterad of FloatNode in fields that can use both. More... | |
Data structures for E57 Simple API.
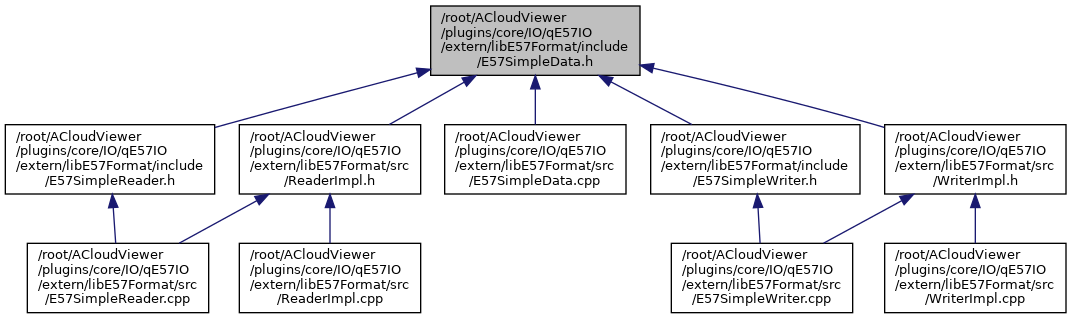
Definition in file E57SimpleData.h.