|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
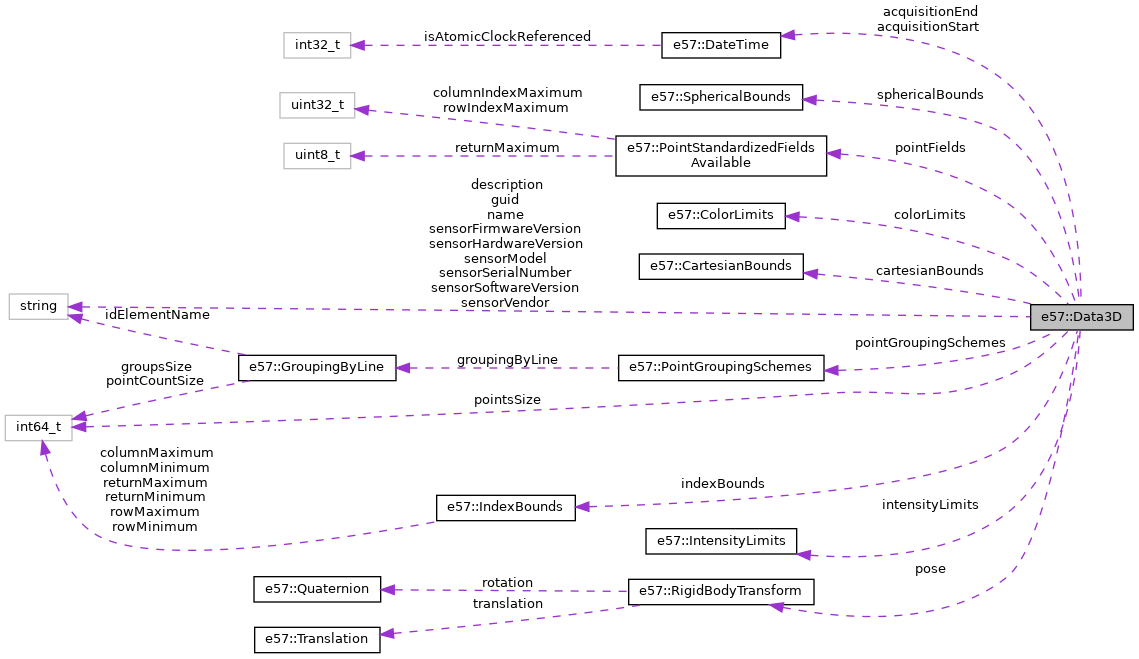
Stores the top-level information for a single lidar scan. More...
#include <E57SimpleData.h>
Public Attributes | |
| ustring | name |
| A user-defined name for the Data3D. More... | |
| ustring | guid |
| A globally unique identification string for the current version of the Data3D object. More... | |
| std::vector< ustring > | originalGuids |
| ustring | description |
| A user-defined description of the Image. More... | |
| ustring | sensorVendor |
| The name of the manufacturer for the sensor used to collect the points in this Data3D. More... | |
| ustring | sensorModel |
| The model name or number for the sensor. More... | |
| ustring | sensorSerialNumber |
| The serial number for the sensor. More... | |
| ustring | sensorHardwareVersion |
| The version number for the sensor hardware at the time of data collection. More... | |
| ustring | sensorSoftwareVersion |
| The version number for the software used for the data collection. More... | |
| ustring | sensorFirmwareVersion |
| float | temperature { E57_FLOAT_MAX } |
| float | relativeHumidity { E57_FLOAT_MAX } |
| float | atmosphericPressure { E57_FLOAT_MAX } |
| DateTime | acquisitionStart |
| The start date and time that the data was acquired. More... | |
| DateTime | acquisitionEnd |
| The end date and time that the data was acquired. More... | |
| RigidBodyTransform | pose |
| IndexBounds | indexBounds |
| The bounds of the row, column, and return number of all the points in this Data3D. More... | |
| CartesianBounds | cartesianBounds |
| SphericalBounds | sphericalBounds |
| IntensityLimits | intensityLimits |
| The limits for the value of signal intensity that the sensor is capable of producing. More... | |
| ColorLimits | colorLimits |
| PointGroupingSchemes | pointGroupingSchemes |
| The defined schemes that group points in different ways. More... | |
| PointStandardizedFieldsAvailable | pointFields |
| This defines the active fields used in the WritePoints function. More... | |
| int64_t | pointsSize { 0 } |
Stores the top-level information for a single lidar scan.
Definition at line 391 of file E57SimpleData.h.
| DateTime e57::Data3D::acquisitionEnd |
The end date and time that the data was acquired.
Definition at line 415 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| DateTime e57::Data3D::acquisitionStart |
The start date and time that the data was acquired.
Definition at line 414 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| float e57::Data3D::atmosphericPressure { E57_FLOAT_MAX } |
The atmospheric pressure, measured at the sensor, at the time of data collection (in Pascals). Shall be positive.
Definition at line 411 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| CartesianBounds e57::Data3D::cartesianBounds |
The bounding region (in cartesian coordinates) of all the points in this Data3D (in the local coordinate system of the points).
Definition at line 420 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| ColorLimits e57::Data3D::colorLimits |
The limits for the value of red, green, and blue color that the sensor is capable of producing.
Definition at line 426 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::description |
A user-defined description of the Image.
Definition at line 397 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::guid |
A globally unique identification string for the current version of the Data3D object.
Definition at line 394 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| IndexBounds e57::Data3D::indexBounds |
The bounds of the row, column, and return number of all the points in this Data3D.
Definition at line 419 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| IntensityLimits e57::Data3D::intensityLimits |
The limits for the value of signal intensity that the sensor is capable of producing.
Definition at line 425 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::name |
A user-defined name for the Data3D.
Definition at line 393 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| std::vector<ustring> e57::Data3D::originalGuids |
A vector of globally unique identification Strings from which the points in this Data3D originated.
Definition at line 395 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| PointStandardizedFieldsAvailable e57::Data3D::pointFields |
This defines the active fields used in the WritePoints function.
Definition at line 431 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| PointGroupingSchemes e57::Data3D::pointGroupingSchemes |
The defined schemes that group points in different ways.
Definition at line 429 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| int64_t e57::Data3D::pointsSize { 0 } |
Total size of the compressed vector of PointRecord structures referring to the binary data that actually stores the point data
Definition at line 433 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| RigidBodyTransform e57::Data3D::pose |
A rigid body transform that describes the coordinate frame of the 3D imaging system origin in the file-level coordinate system.
Definition at line 417 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| float e57::Data3D::relativeHumidity { E57_FLOAT_MAX } |
The percentage relative humidity, measured at the sensor, at the time of data collection. Shall be in the interval [0, 100].
Definition at line 409 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::sensorFirmwareVersion |
The version number for the firmware installed in the sensor at the time of data collection.
Definition at line 404 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::sensorHardwareVersion |
The version number for the sensor hardware at the time of data collection.
Definition at line 402 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::sensorModel |
The model name or number for the sensor.
Definition at line 400 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::sensorSerialNumber |
The serial number for the sensor.
Definition at line 401 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::sensorSoftwareVersion |
The version number for the software used for the data collection.
Definition at line 403 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| ustring e57::Data3D::sensorVendor |
The name of the manufacturer for the sensor used to collect the points in this Data3D.
Definition at line 399 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().
| SphericalBounds e57::Data3D::sphericalBounds |
The bounding region (in spherical coordinates) of all the points in this Data3D (in the local coordinate system of the points).
Definition at line 422 of file E57SimpleData.h.
Referenced by e57::ReaderImpl::ReadData3D().
| float e57::Data3D::temperature { E57_FLOAT_MAX } |
The ambient temperature, measured at the sensor, at the time of data collection (in degrees Celsius).
Definition at line 407 of file E57SimpleData.h.
Referenced by e57::WriterImpl::NewData3D(), and e57::ReaderImpl::ReadData3D().