|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <camera_models.h>
Static Public Member Functions | |
| static int | InitializeModelId () |
| static std::string | InitializeModelName () |
| static size_t | InitializeNumParams () |
| static std::string | InitializeParamsInfo () |
| static std::vector< size_t > | InitializeFocalLengthIdxs () |
| static std::vector< size_t > | InitializePrincipalPointIdxs () |
| static std::vector< size_t > | InitializeExtraParamsIdxs () |
| static std::vector< double > | InitializeParams (const double focal_length, const size_t width, const size_t height) |
| template<typename T > | |
| static void | WorldToImage (const T *params, const T u, const T v, T *x, T *y) |
| template<typename T > | |
| static void | ImageToWorld (const T *params, const T x, const T y, T *u, T *v) |
| template<typename T > | |
| static void | Distortion (const T *extra_params, const T u, const T v, T *du, T *dv) |
 Static Public Member Functions inherited from colmap::BaseCameraModel< SimpleRadialCameraModel > Static Public Member Functions inherited from colmap::BaseCameraModel< SimpleRadialCameraModel > | |
| static bool | HasBogusParams (const std::vector< T > ¶ms, const size_t width, const size_t height, const T min_focal_length_ratio, const T max_focal_length_ratio, const T max_extra_param) |
| static bool | HasBogusFocalLength (const std::vector< T > ¶ms, const size_t width, const size_t height, const T min_focal_length_ratio, const T max_focal_length_ratio) |
| static bool | HasBogusPrincipalPoint (const std::vector< T > ¶ms, const size_t width, const size_t height) |
| static bool | HasBogusExtraParams (const std::vector< T > ¶ms, const T max_extra_param) |
| static T | ImageToWorldThreshold (const T *params, const T threshold) |
| static void | IterativeUndistortion (const T *params, T *u, T *v) |
Static Public Attributes | |
| static const int | kModelId = 2 |
| static const size_t | kNumParams = 4 |
| static const int | model_id |
| static const std::string | model_name |
| static const size_t | num_params |
| static const std::string | params_info |
| static const std::vector< size_t > | focal_length_idxs |
| static const std::vector< size_t > | principal_point_idxs |
| static const std::vector< size_t > | extra_params_idxs |
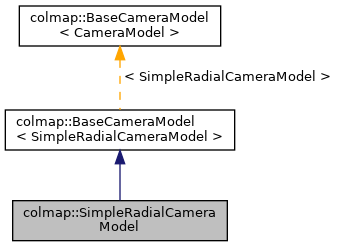
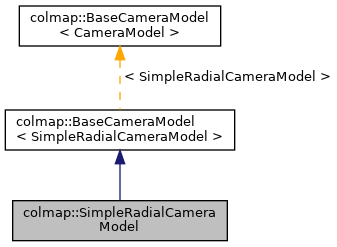
Definition at line 194 of file camera_models.h.
|
static |
Definition at line 742 of file camera_models.h.
|
static |
Definition at line 728 of file camera_models.h.
References colmap::BaseCameraModel< FOVCameraModel >::IterativeUndistortion(), x, and y.
|
inlinestatic |
Definition at line 700 of file camera_models.h.
|
inlinestatic |
Definition at line 692 of file camera_models.h.
|
inlinestatic |
Definition at line 196 of file camera_models.h.
|
inlinestatic |
Definition at line 196 of file camera_models.h.
|
inlinestatic |
Definition at line 196 of file camera_models.h.
|
inlinestatic |
Definition at line 704 of file camera_models.h.
|
inlinestatic |
Definition at line 688 of file camera_models.h.
|
inlinestatic |
Definition at line 696 of file camera_models.h.
|
static |
Definition at line 710 of file camera_models.h.
References colmap::FOVCameraModel::Distortion(), x, and y.
|
static |
Definition at line 196 of file camera_models.h.
Referenced by BOOST_AUTO_TEST_CASE(), colmap::Reconstruction::ExportBundler(), colmap::Reconstruction::ExportCam(), colmap::Reconstruction::ExportNVM(), and colmap::Reconstruction::ExportRecon3D().
|
static |
Definition at line 196 of file camera_models.h.
Referenced by BOOST_AUTO_TEST_CASE().
|
static |
Definition at line 196 of file camera_models.h.
|
static |
Definition at line 196 of file camera_models.h.
|
static |
Definition at line 196 of file camera_models.h.
Referenced by BOOST_AUTO_TEST_CASE(), colmap::Reconstruction::ExportBundler(), colmap::Reconstruction::ExportCam(), colmap::Reconstruction::ExportNVM(), colmap::Reconstruction::ExportRecon3D(), and GenerateReconstruction().
|
static |
Definition at line 196 of file camera_models.h.
|
static |
Definition at line 196 of file camera_models.h.
Referenced by BOOST_AUTO_TEST_CASE().
|
static |
Definition at line 196 of file camera_models.h.
|
static |
Definition at line 196 of file camera_models.h.
Referenced by BOOST_AUTO_TEST_CASE().