|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
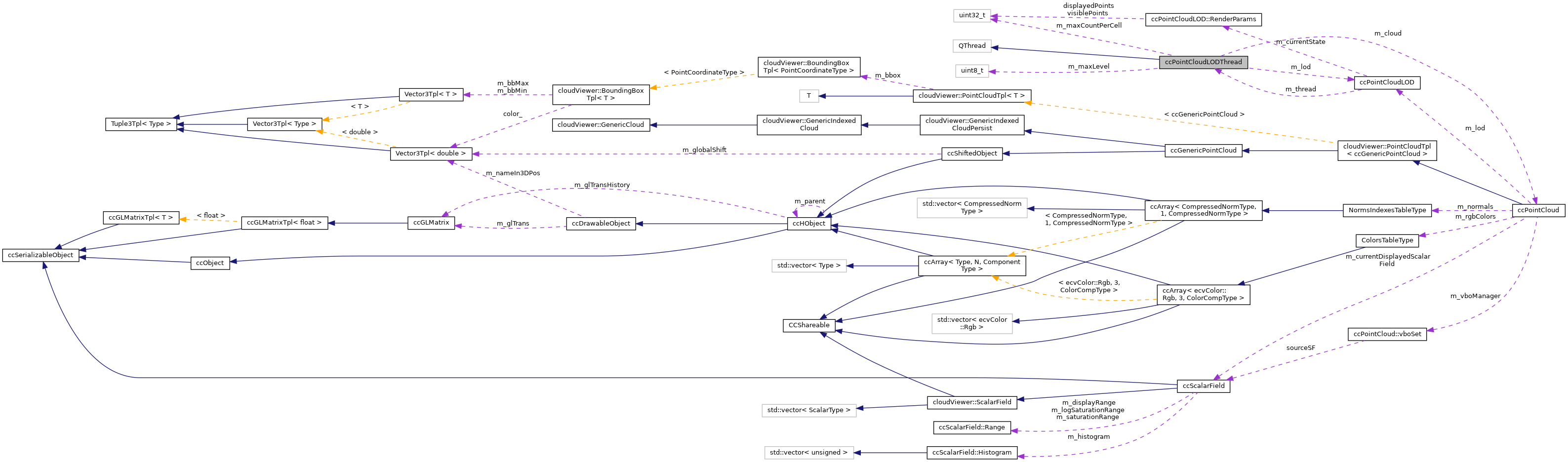
Thread for background computation. More...
Public Member Functions | |
| ccPointCloudLODThread (ccPointCloud &cloud, ccPointCloudLOD &lod, uint32_t maxCountPerCell) | |
| Default constructor. More... | |
| virtual | ~ccPointCloudLODThread () |
| Destructor. More... | |
Protected Member Functions | |
| uint8_t | fillNode (ccPointCloudLOD::Node &node) const |
| Fills a node (and returns its relative position) + recursive. More... | |
| uint8_t | fillNode_flat (ccPointCloudLOD::Node &node) const |
| Fills a node (and returns its relative position) More... | |
| virtual void | run () |
Protected Attributes | |
| ccPointCloud & | m_cloud |
| ccPointCloudLOD & | m_lod |
| ccOctree::Shared | m_octree |
| uint32_t | m_maxCountPerCell |
| uint8_t | m_maxLevel |
Thread for background computation.
Definition at line 19 of file ecvPointCloudLOD.cpp.
|
inline |
Default constructor.
Definition at line 24 of file ecvPointCloudLOD.cpp.
|
inlinevirtual |
Destructor.
Definition at line 35 of file ecvPointCloudLOD.cpp.
|
inlineprotected |
Fills a node (and returns its relative position) + recursive.
Definition at line 39 of file ecvPointCloudLOD.cpp.
References cloudViewer::BoundingBoxTpl< T >::add(), ccPointCloudLOD::Node::center, ccPointCloudLOD::Node::childCount, ccPointCloudLOD::Node::childIndexes, ccPointCloudLOD::Node::firstCodeIndex, Vector3Tpl< float >::fromArray(), Vector3Tpl< double >::fromArray(), cloudViewer::DgmOctree::GET_BIT_SHIFT(), cloudViewer::BoundingBoxTpl< T >::getCenter(), cloudViewer::BoundingBoxTpl< T >::getDiagNormd(), cloudViewer::PointCloudTpl< T >::getPoint(), ccPointCloudLOD::Node::level, m_cloud, m_lod, m_maxCountPerCell, m_maxLevel, m_octree, ccPointCloudLOD::newCell(), ccPointCloudLOD::node(), ccPointCloudLOD::Node::pointCount, ccPointCloudLOD::Node::radius, and Tuple3Tpl< Type >::u.
Referenced by run().
|
inlineprotected |
Fills a node (and returns its relative position)
Definition at line 117 of file ecvPointCloudLOD.cpp.
References ccPointCloudLOD::Node::center, ccPointCloudLOD::Node::firstCodeIndex, Vector3Tpl< double >::fromArray(), Vector3Tpl< float >::fromArray(), cloudViewer::DgmOctree::GET_BIT_SHIFT(), cloudViewer::PointCloudTpl< T >::getPoint(), ccPointCloudLOD::Node::level, m_cloud, m_octree, ccPointCloudLOD::Node::pointCount, ccPointCloudLOD::Node::radius, and Tuple3Tpl< Type >::u.
Referenced by run().
|
inlineprotectedvirtual |
Definition at line 165 of file ecvPointCloudLOD.cpp.
References ccPointCloudLOD::BROKEN, ccPointCloudLOD::Node::childCount, ccPointCloudLOD::Node::childIndexes, ccPointCloudLOD::clearData(), ccPointCloudLOD::Level::data, fillNode(), fillNode_flat(), ccPointCloudLOD::Node::firstCodeIndex, ccObject::getName(), ccGenericPointCloud::getOctree(), ccPointCloudLOD::INITIALIZED, ccPointCloudLOD::Node::level, m_cloud, ccPointCloudLOD::m_levels, m_lod, m_maxCountPerCell, m_maxLevel, m_octree, cloudViewer::DgmOctree::MAX_OCTREE_LEVEL, ccPointCloudLOD::memory(), ccPointCloudLOD::newCell(), ccPointCloudLOD::node(), ccPointCloudLOD::Node::pointCount, CVLog::Print(), ccPointCloudLOD::root(), ccGenericPointCloud::setOctree(), ccPointCloudLOD::setState(), ccPointCloudLOD::shrink_to_fit(), cloudViewer::PointCloudTpl< T >::size(), ccPointCloudLOD::UNDER_CONSTRUCTION, ccOctree::updated(), and CVLog::Warning().
|
protected |
Definition at line 374 of file ecvPointCloudLOD.cpp.
Referenced by fillNode(), fillNode_flat(), and run().
|
protected |
Definition at line 375 of file ecvPointCloudLOD.cpp.
Referenced by fillNode(), and run().
|
protected |
Definition at line 377 of file ecvPointCloudLOD.cpp.
Referenced by fillNode(), and run().
|
protected |
Definition at line 378 of file ecvPointCloudLOD.cpp.
Referenced by fillNode(), and run().
|
protected |
Definition at line 376 of file ecvPointCloudLOD.cpp.
Referenced by fillNode(), fillNode_flat(), and run().