|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
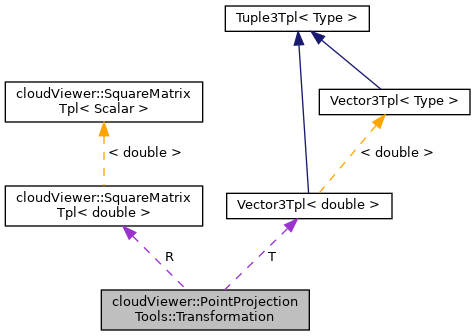
A scaled geometrical transformation (scale + rotation + translation) More...
#include <PointProjectionTools.h>
Public Member Functions | |
| Transformation () | |
| Default constructor. More... | |
| CCVector3d | apply (const CCVector3d &P) const |
| Applies the transformation to a point. More... | |
| CCVector3 | apply (const CCVector3 &P) const |
| Applies the transformation to a point. More... | |
| void | apply (GenericIndexedCloudPersist &cloud) const |
| Applies the transformation to a cloud. More... | |
Public Attributes | |
| SquareMatrixd | R |
| Rotation. More... | |
| CCVector3d | T |
| Translation. More... | |
| double | s |
| Scale. More... | |
A scaled geometrical transformation (scale + rotation + translation)
P' = s.R.P + T
Definition at line 40 of file PointProjectionTools.h.
|
inline |
Default constructor.
Definition at line 49 of file PointProjectionTools.h.
|
inline |
Applies the transformation to a point.
Definition at line 57 of file PointProjectionTools.h.
References Vector3Tpl< Type >::toPC().
|
inline |
Applies the transformation to a point.
Definition at line 52 of file PointProjectionTools.h.
Referenced by apply(), cloudViewer::PointProjectionTools::applyTransformation(), ccPointPairRegistrationDlg::callHornRegistration(), cloudViewer::HornRegistrationTools::ComputeRMS(), cloudViewer::RegistrationTools::FilterTransformation(), cloudViewer::ICPRegistrationTools::Register(), and cloudViewer::RegistrationTools::RegistrationProcedure().
| void PointProjectionTools::Transformation::apply | ( | GenericIndexedCloudPersist & | cloud | ) | const |
Applies the transformation to a cloud.
Definition at line 826 of file PointProjectionTools.cpp.
References apply(), cloudViewer::GenericIndexedCloud::getNormal(), cloudViewer::GenericIndexedCloud::getPoint(), cloudViewer::GenericIndexedCloud::normalsAvailable(), R, and cloudViewer::GenericCloud::size().
| SquareMatrixd cloudViewer::PointProjectionTools::Transformation::R |
Rotation.
Definition at line 42 of file PointProjectionTools.h.
Referenced by ccPointPairRegistrationDlg::align(), ccPointPairRegistrationDlg::apply(), apply(), cloudViewer::PointProjectionTools::applyTransformation(), cloudViewer::FPCSRegistrationTools::ComputeRegistrationScore(), cloudViewer::RegistrationTools::FilterTransformation(), ccRegistrationTools::ICP(), cloudViewer::ICPRegistrationTools::Register(), cloudViewer::FPCSRegistrationTools::RegisterClouds(), and cloudViewer::RegistrationTools::RegistrationProcedure().
| double cloudViewer::PointProjectionTools::Transformation::s |
Scale.
Definition at line 46 of file PointProjectionTools.h.
Referenced by ccPointPairRegistrationDlg::align(), ccPointPairRegistrationDlg::apply(), ccRegistrationTools::ICP(), cloudViewer::ICPRegistrationTools::Register(), and cloudViewer::RegistrationTools::RegistrationProcedure().
| CCVector3d cloudViewer::PointProjectionTools::Transformation::T |
Translation.
Definition at line 44 of file PointProjectionTools.h.
Referenced by ccPointPairRegistrationDlg::align(), ccPointPairRegistrationDlg::apply(), cloudViewer::FPCSRegistrationTools::ComputeRegistrationScore(), cloudViewer::RegistrationTools::FilterTransformation(), ccRegistrationTools::ICP(), cloudViewer::ICPRegistrationTools::Register(), cloudViewer::FPCSRegistrationTools::RegisterClouds(), and cloudViewer::RegistrationTools::RegistrationProcedure().