|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <DgmOctree.h>
Public Member Functions | |
| ProgressiveCylindricalNeighbourhood () | |
 Public Member Functions inherited from cloudViewer::DgmOctree::CylindricalNeighbourhood Public Member Functions inherited from cloudViewer::DgmOctree::CylindricalNeighbourhood | |
| CylindricalNeighbourhood () | |
| Default constructor. More... | |
Public Attributes | |
| PointCoordinateType | currentHalfLength |
| Current search depth. More... | |
| NeighboursSet | potentialCandidates |
| Vector to store potential candidates for the next pass. More... | |
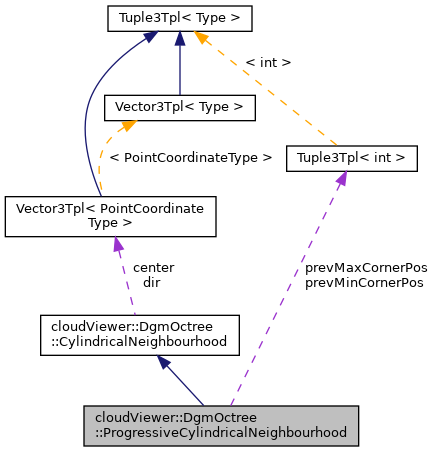
| Tuple3i | prevMinCornerPos |
| Previous search box (min corner) More... | |
| Tuple3i | prevMaxCornerPos |
| Previous search box (max corner) More... | |
| Public Attributes inherited from cloudViewer::DgmOctree::CylindricalNeighbourhood | |
| CCVector3 | center |
| Cylinder center. More... | |
| CCVector3 | dir |
| Cylinder axis (direction) More... | |
| PointCoordinateType | radius |
| Cylinder radius. More... | |
| PointCoordinateType | maxHalfLength |
| Cylinder (half) length. More... | |
| NeighboursSet | neighbours |
| Neighbour points falling inside the cylinder. More... | |
| unsigned char | level |
| subdivision level at which to apply the extraction process More... | |
| bool | onlyPositiveDir |
Input/output parameters structure for getPointsInCylindricalNeighbourhoodProgressive
Definition at line 699 of file DgmOctree.h.
|
inline |
Definition at line 712 of file DgmOctree.h.
| PointCoordinateType cloudViewer::DgmOctree::ProgressiveCylindricalNeighbourhood::currentHalfLength |
Current search depth.
Definition at line 701 of file DgmOctree.h.
Referenced by ComputeM3C2DistForPoint().
| NeighboursSet cloudViewer::DgmOctree::ProgressiveCylindricalNeighbourhood::potentialCandidates |
Vector to store potential candidates for the next pass.
Candidates are points close enough to the cylinder's axis but too far from its actual center.
Definition at line 706 of file DgmOctree.h.
| Tuple3i cloudViewer::DgmOctree::ProgressiveCylindricalNeighbourhood::prevMaxCornerPos |
Previous search box (max corner)
Definition at line 710 of file DgmOctree.h.
| Tuple3i cloudViewer::DgmOctree::ProgressiveCylindricalNeighbourhood::prevMinCornerPos |
Previous search box (min corner)
Definition at line 708 of file DgmOctree.h.