|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "cloudViewer/t/geometry/kernel/PointCloud.h"#include <Logging.h>#include <vector>#include "cloudViewer/core/CUDAUtils.h"#include "cloudViewer/core/ShapeUtil.h"#include "cloudViewer/core/Tensor.h"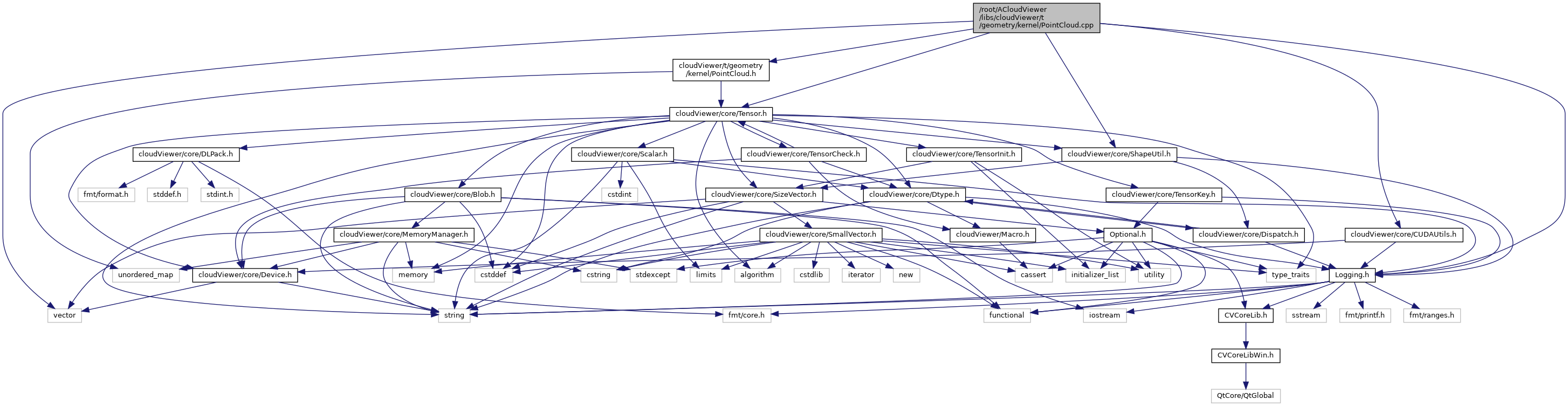
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::t | |
| cloudViewer::t::geometry | |
| cloudViewer::t::geometry::kernel | |
| cloudViewer::t::geometry::kernel::pointcloud | |
Functions | |
| void | cloudViewer::t::geometry::kernel::pointcloud::Unproject (const core::Tensor &depth, utility::optional< std::reference_wrapper< const core::Tensor >> image_colors, core::Tensor &points, utility::optional< std::reference_wrapper< core::Tensor >> colors, const core::Tensor &intrinsics, const core::Tensor &extrinsics, float depth_scale, float depth_max, int64_t stride) |
| void | cloudViewer::t::geometry::kernel::pointcloud::Project (core::Tensor &depth, utility::optional< std::reference_wrapper< core::Tensor >> image_colors, const core::Tensor &points, utility::optional< std::reference_wrapper< const core::Tensor >> colors, const core::Tensor &intrinsics, const core::Tensor &extrinsics, float depth_scale, float depth_max) |
| void | cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinAABB (const core::Tensor &points, const core::Tensor &min_bound, const core::Tensor &max_bound, core::Tensor &mask) |
| void | cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinOBB (const core::Tensor &points, const core::Tensor ¢er, const core::Tensor &rotation, const core::Tensor &extent, core::Tensor &mask) |