|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "io/PointCloudIO.h"#include <FileSystem.h>#include <Helper.h>#include <Logging.h>#include <ProgressReporters.h>#include <ecvPointCloud.h>#include <AutoIO.h>#include <iostream>#include <unordered_map>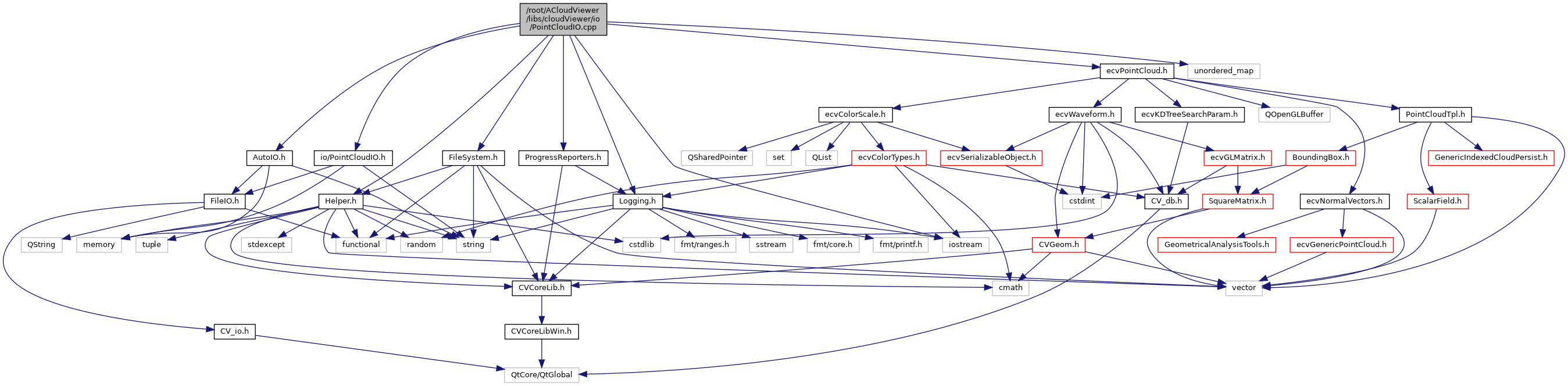
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::io | |
Functions | |
| std::shared_ptr< ccPointCloud > | cloudViewer::io::CreatePointCloudFromFile (const std::string &filename, const std::string &format, bool print_progress) |
| std::shared_ptr< ccPointCloud > | cloudViewer::io::CreatePointCloudFromMemory (const unsigned char *buffer, const size_t length, const std::string &format, bool print_progress) |
| bool | cloudViewer::io::ReadPointCloud (const std::string &filename, ccPointCloud &pointcloud, const ReadPointCloudOption ¶ms) |
| bool | cloudViewer::io::ReadPointCloud (const std::string &filename, ccPointCloud &pointcloud, const std::string &file_format, bool remove_nan_points, bool remove_infinite_points, bool print_progress) |
| bool | cloudViewer::io::ReadPointCloud (const unsigned char *buffer, const size_t length, ccPointCloud &pointcloud, const ReadPointCloudOption ¶ms) |
| bool | cloudViewer::io::WritePointCloud (const std::string &filename, const ccPointCloud &pointcloud, const WritePointCloudOption ¶ms) |
| bool | cloudViewer::io::WritePointCloud (const std::string &filename, const ccPointCloud &pointcloud, const std::string &file_format, bool write_ascii, bool compressed, bool print_progress) |
| bool | cloudViewer::io::WritePointCloud (unsigned char *&buffer, size_t &length, const ccPointCloud &pointcloud, const WritePointCloudOption ¶ms) |
Variables | |
| static const std::unordered_map< std::string, std::function< bool(const std::string &, ccPointCloud &, const ReadPointCloudOption &)> > | cloudViewer::io::file_extension_to_pointcloud_read_function |
| static const std::unordered_map< std::string, std::function< bool(const unsigned char *, const size_t, ccPointCloud &, const ReadPointCloudOption &)> > | cloudViewer::io::in_memory_to_pointcloud_read_function |
| static const std::unordered_map< std::string, std::function< bool(const std::string &, const ccPointCloud &, const WritePointCloudOption &)> > | cloudViewer::io::file_extension_to_pointcloud_write_function |
| static const std::unordered_map< std::string, std::function< bool(unsigned char *&, size_t &, const ccPointCloud &, const WritePointCloudOption &)> > | cloudViewer::io::in_memory_to_pointcloud_write_function |