|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
RGBD video metadata. More...
#include <RGBDVideoMetadata.h>
Public Member Functions | |
| bool | ConvertToJsonValue (Json::Value &value) const override |
| bool | ConvertFromJsonValue (const Json::Value &value) override |
 Public Member Functions inherited from cloudViewer::utility::IJsonConvertible Public Member Functions inherited from cloudViewer::utility::IJsonConvertible | |
| virtual | ~IJsonConvertible () |
| virtual std::string | ToString () const |
| Convert to a styled string representation of JSON data for display. More... | |
Public Attributes | |
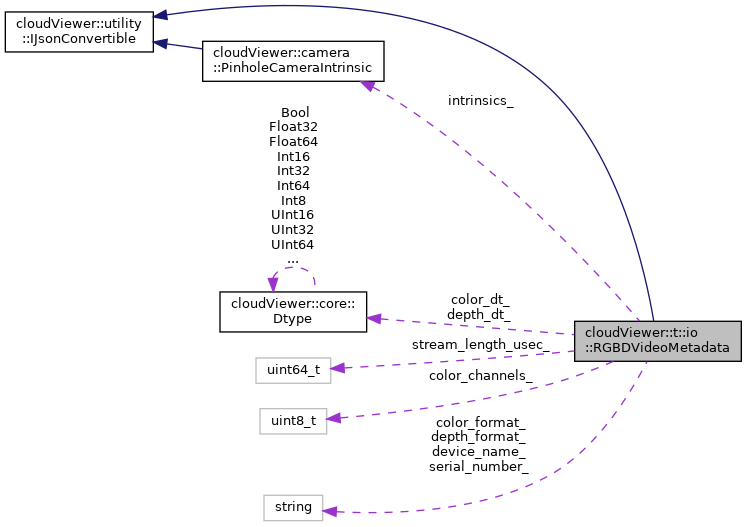
| camera::PinholeCameraIntrinsic | intrinsics_ |
| Shared intrinsics between RGB & depth. More... | |
| std::string | device_name_ = "" |
| Capture device name. More... | |
| std::string | serial_number_ = "" |
| Capture device serial number. More... | |
| uint64_t | stream_length_usec_ = 0 |
| Length of the video (usec). 0 for live capture. More... | |
| int | width_ |
| Width of the video frame. More... | |
| int | height_ |
| Height of the video frame. More... | |
| double | fps_ |
| Frame rate. More... | |
| std::string | color_format_ |
| Pixel format for color data. More... | |
| std::string | depth_format_ |
| Pixel format for depth data. More... | |
| core::Dtype | color_dt_ |
| Pixel Dtype for color data. More... | |
| core::Dtype | depth_dt_ |
| Pixel Dtype for depth data. More... | |
| uint8_t | color_channels_ |
| Number of color channels. More... | |
| double | depth_scale_ |
Additional Inherited Members | |
| Static Public Member Functions inherited from cloudViewer::utility::IJsonConvertible | |
| static bool | EigenVector3dFromJsonArray (Eigen::Vector3d &vec, const Json::Value &value) |
| static bool | EigenVector3dToJsonArray (const Eigen::Vector3d &vec, Json::Value &value) |
| static bool | EigenVector4dFromJsonArray (Eigen::Vector4d &vec, const Json::Value &value) |
| static bool | EigenVector4dToJsonArray (const Eigen::Vector4d &vec, Json::Value &value) |
| static bool | EigenMatrix3dFromJsonArray (Eigen::Matrix3d &mat, const Json::Value &value) |
| static bool | EigenMatrix3dToJsonArray (const Eigen::Matrix3d &mat, Json::Value &value) |
| static bool | EigenMatrix4dFromJsonArray (Eigen::Matrix4d &mat, const Json::Value &value) |
| static bool | EigenMatrix4dToJsonArray (const Eigen::Matrix4d &mat, Json::Value &value) |
| static bool | EigenMatrix4dFromJsonArray (Eigen::Matrix4d_u &mat, const Json::Value &value) |
| static bool | EigenMatrix4dToJsonArray (const Eigen::Matrix4d_u &mat, Json::Value &value) |
| static bool | EigenMatrix6dFromJsonArray (Eigen::Matrix6d &mat, const Json::Value &value) |
| static bool | EigenMatrix6dToJsonArray (const Eigen::Matrix6d &mat, Json::Value &value) |
| static bool | EigenMatrix6dFromJsonArray (Eigen::Matrix6d_u &mat, const Json::Value &value) |
| static bool | EigenMatrix6dToJsonArray (const Eigen::Matrix6d_u &mat, Json::Value &value) |
RGBD video metadata.
Definition at line 27 of file RGBDVideoMetadata.h.
|
overridevirtual |
Implements cloudViewer::utility::IJsonConvertible.
Definition at line 35 of file RGBDVideoMetadata.cpp.
References color_format_, cloudViewer::camera::PinholeCameraIntrinsic::ConvertFromJsonValue(), depth_format_, depth_scale_, device_name_, fps_, height_, intrinsics_, serial_number_, stream_length_usec_, and width_.
Referenced by cloudViewer::t::io::RealSenseSensor::InitSensor(), cloudViewer::t::io::RSBagReader::Open(), and cloudViewer::t::io::RealSenseSensor::StartCapture().
|
overridevirtual |
Implements cloudViewer::utility::IJsonConvertible.
Definition at line 18 of file RGBDVideoMetadata.cpp.
References color_format_, cloudViewer::camera::PinholeCameraIntrinsic::ConvertToJsonValue(), depth_format_, depth_scale_, device_name_, fps_, height_, intrinsics_, serial_number_, stream_length_usec_, and width_.
| uint8_t cloudViewer::t::io::RGBDVideoMetadata::color_channels_ |
Number of color channels.
Definition at line 75 of file RGBDVideoMetadata.h.
Referenced by cloudViewer::t::io::RealSenseSensorConfig::GetPixelDtypes(), and cloudViewer::t::io::pybind_sensor().
| core::Dtype cloudViewer::t::io::RGBDVideoMetadata::color_dt_ |
Pixel Dtype for color data.
Definition at line 69 of file RGBDVideoMetadata.h.
Referenced by cloudViewer::t::io::RealSenseSensor::CaptureFrame(), cloudViewer::t::io::RealSenseSensorConfig::GetPixelDtypes(), and cloudViewer::t::io::pybind_sensor().
| std::string cloudViewer::t::io::RGBDVideoMetadata::color_format_ |
Pixel format for color data.
Definition at line 63 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), and cloudViewer::t::io::pybind_sensor().
| core::Dtype cloudViewer::t::io::RGBDVideoMetadata::depth_dt_ |
Pixel Dtype for depth data.
Definition at line 72 of file RGBDVideoMetadata.h.
Referenced by cloudViewer::t::io::RealSenseSensor::CaptureFrame(), cloudViewer::t::io::RealSenseSensorConfig::GetPixelDtypes(), and cloudViewer::t::io::pybind_sensor().
| std::string cloudViewer::t::io::RGBDVideoMetadata::depth_format_ |
Pixel format for depth data.
Definition at line 66 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), and cloudViewer::t::io::pybind_sensor().
| double cloudViewer::t::io::RGBDVideoMetadata::depth_scale_ |
Number of depth units per meter (depth in m = depth_pixel_value/depth_scale).
Definition at line 79 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), and cloudViewer::t::io::pybind_sensor().
| std::string cloudViewer::t::io::RGBDVideoMetadata::device_name_ = "" |
Capture device name.
Definition at line 43 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), and cloudViewer::t::io::pybind_sensor().
| double cloudViewer::t::io::RGBDVideoMetadata::fps_ |
Frame rate.
We assume both color and depth streams have the same frame rate.
Definition at line 60 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), cloudViewer::t::io::RSBagReader::NextFrame(), and cloudViewer::t::io::pybind_sensor().
| int cloudViewer::t::io::RGBDVideoMetadata::height_ |
Height of the video frame.
Definition at line 55 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), and cloudViewer::t::io::pybind_sensor().
| camera::PinholeCameraIntrinsic cloudViewer::t::io::RGBDVideoMetadata::intrinsics_ |
Shared intrinsics between RGB & depth.
We assume depth image is always warped to the color image system.
Definition at line 40 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), and cloudViewer::t::io::pybind_sensor().
| std::string cloudViewer::t::io::RGBDVideoMetadata::serial_number_ = "" |
Capture device serial number.
Definition at line 46 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), and cloudViewer::t::io::pybind_sensor().
| uint64_t cloudViewer::t::io::RGBDVideoMetadata::stream_length_usec_ = 0 |
Length of the video (usec). 0 for live capture.
Definition at line 49 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), cloudViewer::t::io::pybind_sensor(), and cloudViewer::t::io::RSBagReader::SeekTimestamp().
| int cloudViewer::t::io::RGBDVideoMetadata::width_ |
Width of the video frame.
Definition at line 52 of file RGBDVideoMetadata.h.
Referenced by ConvertFromJsonValue(), ConvertToJsonValue(), and cloudViewer::t::io::pybind_sensor().