|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
Finds a the biggets enclosed rectangle in a point cloud (2D) More...
#include <ecvInnerRect2DFinder.h>
Classes | |
| struct | Rect |
| 2D rectangle More... | |
Public Member Functions | |
| ccInnerRect2DFinder () | |
| Default constructor. More... | |
| ccBox * | process (ccGenericPointCloud *cloud, unsigned char zDim=2) |
| Finds the biggest enclosed rectangle. More... | |
Protected Member Functions | |
| bool | init (ccGenericPointCloud *cloud, unsigned char zDim) |
| Initializes internal structures. More... | |
| void | findBiggestRect (const Rect &rect, unsigned startIndex) |
| Internal processs. More... | |
Protected Attributes | |
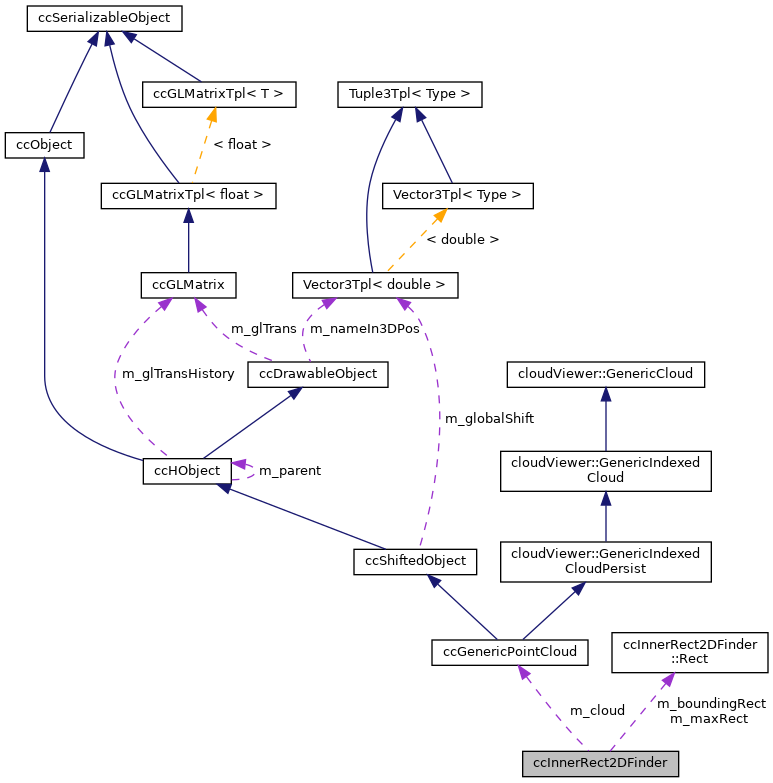
| Rect | m_boundingRect |
| Global rectangle. More... | |
| Rect | m_maxRect |
| Inner rectangle. More... | |
| double | m_maxArea |
| Inner rectangle max area. More... | |
| ccGenericPointCloud * | m_cloud |
| Associated cloud. More... | |
| unsigned char | m_X |
| X dimension. More... | |
| unsigned char | m_Y |
| Y dimension. More... | |
Finds a the biggets enclosed rectangle in a point cloud (2D)
Definition at line 15 of file ecvInnerRect2DFinder.h.
| ccInnerRect2DFinder::ccInnerRect2DFinder | ( | ) |
Default constructor.
Definition at line 16 of file ecvInnerRect2DFinder.cpp.
|
protected |
Internal processs.
Definition at line 100 of file ecvInnerRect2DFinder.cpp.
References ccInnerRect2DFinder::Rect::area(), cloudViewer::GenericIndexedCloud::getPoint(), m_cloud, m_maxArea, m_maxRect, m_X, m_Y, cloudViewer::GenericCloud::size(), Tuple3Tpl< Type >::u, rect::x1, and rect::y1.
Referenced by process().
|
protected |
Initializes internal structures.
Definition at line 52 of file ecvInnerRect2DFinder.cpp.
References CVLog::Error(), ccGenericPointCloud::getOwnBB(), cloudViewer::GenericIndexedCloud::getPoint(), cloudViewer::BoundingBoxTpl< T >::isValid(), m_boundingRect, m_cloud, m_X, m_Y, cloudViewer::GenericCloud::size(), Tuple3Tpl< Type >::u, X, ccInnerRect2DFinder::Rect::x0, ccInnerRect2DFinder::Rect::x1, ccInnerRect2DFinder::Rect::y0, and ccInnerRect2DFinder::Rect::y1.
Referenced by process().
| ccBox * ccInnerRect2DFinder::process | ( | ccGenericPointCloud * | cloud, |
| unsigned char | zDim = 2 |
||
| ) |
Finds the biggest enclosed rectangle.
Definition at line 19 of file ecvInnerRect2DFinder.cpp.
References findBiggestRect(), cloudViewer::BoundingBoxTpl< T >::getCenter(), cloudViewer::BoundingBoxTpl< T >::getDiagVec(), ccGenericPointCloud::getOwnBB(), ccInnerRect2DFinder::Rect::height(), init(), cloudViewer::BoundingBoxTpl< T >::isValid(), m_boundingRect, m_maxArea, m_maxRect, m_X, m_Y, ccGLMatrixTpl< T >::setTranslation(), Tuple3Tpl< Type >::u, ccInnerRect2DFinder::Rect::width(), ccInnerRect2DFinder::Rect::x0, ccInnerRect2DFinder::Rect::x1, ccInnerRect2DFinder::Rect::y0, and ccInnerRect2DFinder::Rect::y1.
|
protected |
Global rectangle.
Definition at line 44 of file ecvInnerRect2DFinder.h.
|
protected |
Associated cloud.
Definition at line 52 of file ecvInnerRect2DFinder.h.
Referenced by findBiggestRect(), and init().
|
protected |
Inner rectangle max area.
Definition at line 49 of file ecvInnerRect2DFinder.h.
Referenced by findBiggestRect(), and process().
|
protected |
Inner rectangle.
Definition at line 47 of file ecvInnerRect2DFinder.h.
Referenced by findBiggestRect(), and process().
|
protected |
X dimension.
Definition at line 55 of file ecvInnerRect2DFinder.h.
Referenced by findBiggestRect(), init(), and process().
|
protected |
Y dimension.
Definition at line 57 of file ecvInnerRect2DFinder.h.
Referenced by findBiggestRect(), init(), and process().