|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <E57Header.h>
Public Member Functions | |
| Image2DProjection | getType () override |
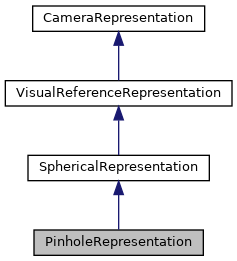
 Public Member Functions inherited from CameraRepresentation Public Member Functions inherited from CameraRepresentation | |
| virtual | ~CameraRepresentation ()=default |
Public Attributes | |
| double | focalLength |
| double | principalPointX |
| double | principalPointY |
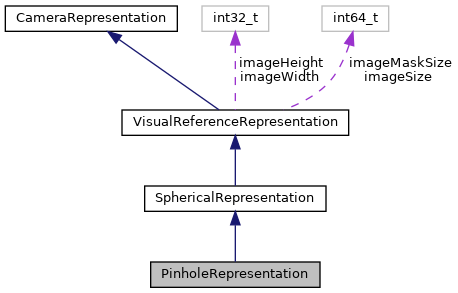
| Public Attributes inherited from SphericalRepresentation | |
| double | pixelWidth |
| double | pixelHeight |
| Public Attributes inherited from VisualReferenceRepresentation | |
| Image2DType | imageType |
| image type. More... | |
| int64_t | imageSize |
| size of image data in BlobNode. More... | |
| int64_t | imageMaskSize |
| size of image mask data in BlobNode (if any). More... | |
| int32_t | imageWidth |
| image width (in pixels). Shall be positive More... | |
| int32_t | imageHeight |
| image height (in pixels). Shall be positive More... | |
Structure that stores an image that is mapped from 3D using the pinhole camera projection model. From "E57 Simple API" by Stan Coleby
Definition at line 243 of file E57Header.h.
|
inlineoverridevirtual |
Reimplemented from SphericalRepresentation.
Definition at line 245 of file E57Header.h.
References E57_PINHOLE.
| double PinholeRepresentation::focalLength |
The camera's focal length (in meters). Shall be positive
Definition at line 247 of file E57Header.h.
Referenced by LoadImage().
| double PinholeRepresentation::principalPointX |
The X coordinate in the image of the principal point, (in pixels). The principal point is the intersection of the z axis of the camera coordinate frame with the image plane.
Definition at line 249 of file E57Header.h.
Referenced by LoadImage().
| double PinholeRepresentation::principalPointY |
The Y coordinate in the image of the principal point (in pixels).
Definition at line 253 of file E57Header.h.
Referenced by LoadImage().