|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "pipelines/color_map/RigidOptimizer.h"#include <FileSystem.h>#include <ImageIO.h>#include <Optional.h>#include <Parallel.h>#include <PinholeCameraTrajectoryIO.h>#include <memory>#include <vector>#include "io/TriangleMeshIO.h"#include "pipelines/color_map/ColorMapUtils.h"#include "pipelines/color_map/ImageWarpingField.h"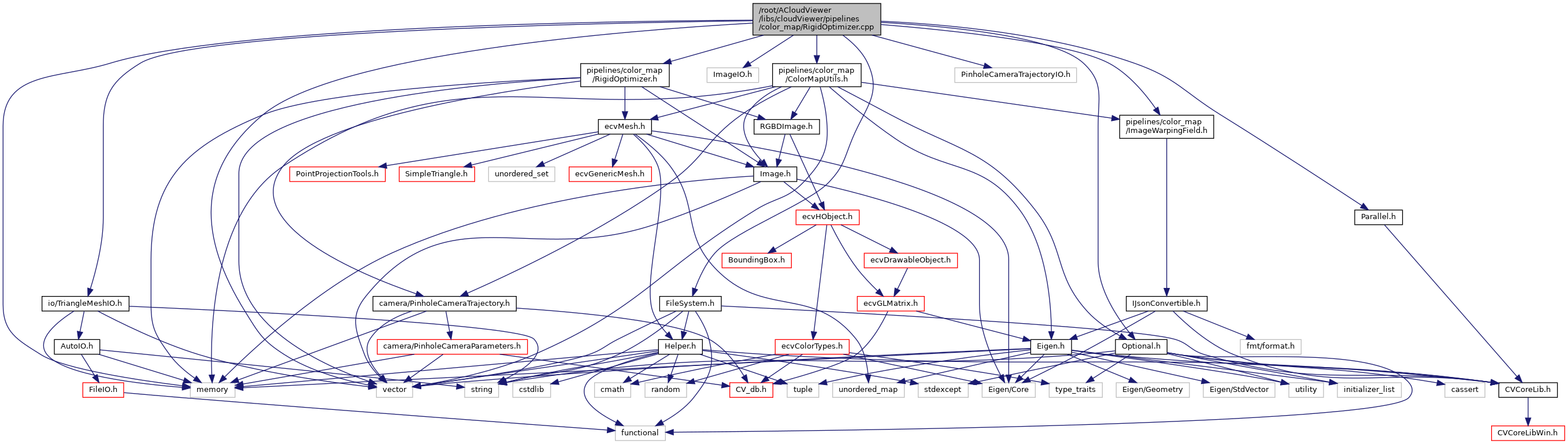
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::pipelines | |
| cloudViewer::pipelines::color_map | |
Functions | |
| static void | cloudViewer::pipelines::color_map::ComputeJacobianAndResidualRigid (int row, Eigen::Vector6d &J_r, double &r, double &w, const ccMesh &mesh, const std::vector< double > &proxy_intensity, const geometry::Image &images_gray, const geometry::Image &images_dx, const geometry::Image &images_dy, const Eigen::Matrix4d &intrinsic, const Eigen::Matrix4d &extrinsic, const std::vector< int > &visibility_image_to_vertex, const int image_boundary_margin) |
| std::pair< ccMesh, camera::PinholeCameraTrajectory > | cloudViewer::pipelines::color_map::RunRigidOptimizer (const ccMesh &mesh, const std::vector< geometry::RGBDImage > &images_rgbd, const camera::PinholeCameraTrajectory &camera_trajectory, const RigidOptimizerOption &option) |