|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <Logging.h>#include <atomic>#include <vector>#include "cloudViewer/core/CUDAUtils.h"#include "cloudViewer/core/Dispatch.h"#include "cloudViewer/core/Dtype.h"#include "cloudViewer/core/MemoryManager.h"#include "cloudViewer/core/ParallelFor.h"#include "cloudViewer/core/SizeVector.h"#include "cloudViewer/core/Tensor.h"#include "cloudViewer/core/linalg/kernel/Matrix.h"#include "cloudViewer/core/linalg/kernel/SVD3x3.h"#include "cloudViewer/core/nns/NearestNeighborSearch.h"#include "cloudViewer/t/geometry/Utility.h"#include "cloudViewer/t/geometry/kernel/GeometryIndexer.h"#include "cloudViewer/t/geometry/kernel/GeometryMacros.h"#include "cloudViewer/t/geometry/kernel/PointCloud.h"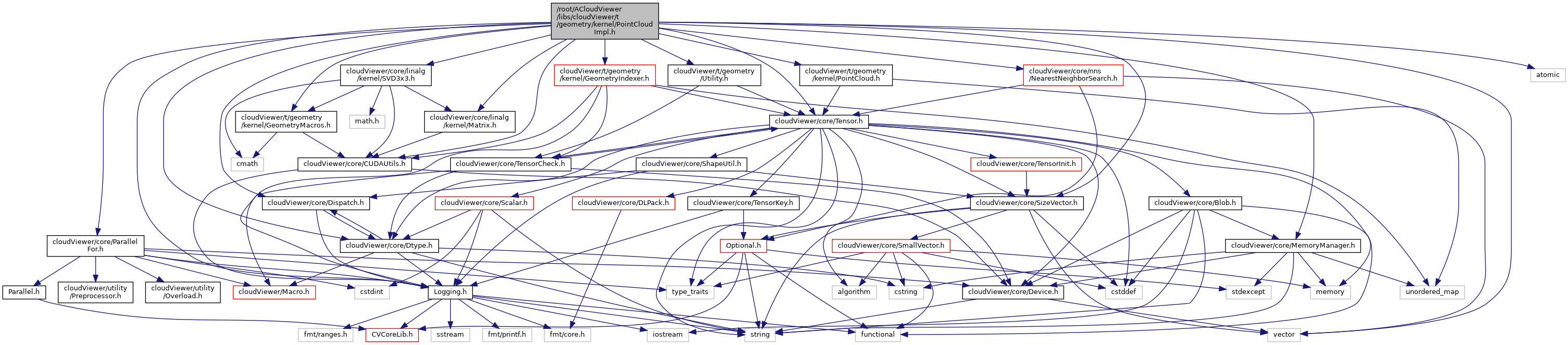
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::t | |
| cloudViewer::t::geometry | |
| cloudViewer::t::geometry::kernel | |
| cloudViewer::t::geometry::kernel::pointcloud | |
Functions | |
| void | cloudViewer::t::geometry::kernel::pointcloud::UnprojectCPU (const core::Tensor &depth, utility::optional< std::reference_wrapper< const core::Tensor >> image_colors, core::Tensor &points, utility::optional< std::reference_wrapper< core::Tensor >> colors, const core::Tensor &intrinsics, const core::Tensor &extrinsics, float depth_scale, float depth_max, int64_t stride) |
| void | cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinAABBCPU (const core::Tensor &points, const core::Tensor &min_bound, const core::Tensor &max_bound, core::Tensor &mask) |
| void | cloudViewer::t::geometry::kernel::pointcloud::GetPointMaskWithinOBBCPU (const core::Tensor &points, const core::Tensor ¢er, const core::Tensor &rotation, const core::Tensor &extent, core::Tensor &mask) |
| void | cloudViewer::t::geometry::kernel::pointcloud::NormalizeNormalsCPU (core::Tensor &normals) |
| void | cloudViewer::t::geometry::kernel::pointcloud::OrientNormalsToAlignWithDirectionCPU (core::Tensor &normals, const core::Tensor &direction) |
| void | cloudViewer::t::geometry::kernel::pointcloud::OrientNormalsTowardsCameraLocationCPU (const core::Tensor &points, core::Tensor &normals, const core::Tensor &camera) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::GetCoordinateSystemOnPlane (const scalar_t *query, scalar_t *u, scalar_t *v) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::Swap (scalar_t *x, scalar_t *y) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::Heapify (scalar_t *arr, int n, int root) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::HeapSort (scalar_t *arr, int n) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE bool | cloudViewer::t::geometry::kernel::pointcloud::IsBoundaryPoints (const scalar_t *angles, int counts, double angle_threshold) |
| void | cloudViewer::t::geometry::kernel::pointcloud::ComputeBoundaryPointsCPU (const core::Tensor &points, const core::Tensor &normals, const core::Tensor &indices, const core::Tensor &counts, core::Tensor &mask, double angle_threshold) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::EstimatePointWiseRobustNormalizedCovarianceKernel (const scalar_t *points_ptr, const int32_t *indices_ptr, const int32_t &indices_count, scalar_t *covariance_ptr) |
| void | cloudViewer::t::geometry::kernel::pointcloud::EstimateCovariancesUsingHybridSearchCPU (const core::Tensor &points, core::Tensor &covariances, const double &radius, const int64_t &max_nn) |
| void | cloudViewer::t::geometry::kernel::pointcloud::EstimateCovariancesUsingRadiusSearchCPU (const core::Tensor &points, core::Tensor &covariances, const double &radius) |
| void | cloudViewer::t::geometry::kernel::pointcloud::EstimateCovariancesUsingKNNSearchCPU (const core::Tensor &points, core::Tensor &covariances, const int64_t &max_nn) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::ComputeEigenvector0 (const scalar_t *A, const scalar_t eval0, scalar_t *eigen_vector0) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::ComputeEigenvector1 (const scalar_t *A, const scalar_t *evec0, const scalar_t eval1, scalar_t *eigen_vector1) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::EstimatePointWiseNormalsWithFastEigen3x3 (const scalar_t *covariance_ptr, scalar_t *normals_ptr) |
| void | cloudViewer::t::geometry::kernel::pointcloud::EstimateNormalsFromCovariancesCPU (const core::Tensor &covariances, core::Tensor &normals, const bool has_normals) |
| template<typename scalar_t > | |
| CLOUDVIEWER_HOST_DEVICE void | cloudViewer::t::geometry::kernel::pointcloud::EstimatePointWiseColorGradientKernel (const scalar_t *points_ptr, const scalar_t *normals_ptr, const scalar_t *colors_ptr, const int32_t &idx_offset, const int32_t *indices_ptr, const int32_t &indices_count, scalar_t *color_gradients_ptr) |
| void | cloudViewer::t::geometry::kernel::pointcloud::EstimateColorGradientsUsingHybridSearchCPU (const core::Tensor &points, const core::Tensor &normals, const core::Tensor &colors, core::Tensor &color_gradient, const double &radius, const int64_t &max_nn) |
| void | cloudViewer::t::geometry::kernel::pointcloud::EstimateColorGradientsUsingKNNSearchCPU (const core::Tensor &points, const core::Tensor &normals, const core::Tensor &colors, core::Tensor &color_gradient, const int64_t &max_nn) |
| void | cloudViewer::t::geometry::kernel::pointcloud::EstimateColorGradientsUsingRadiusSearchCPU (const core::Tensor &points, const core::Tensor &normals, const core::Tensor &colors, core::Tensor &color_gradient, const double &radius) |