|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <Eigen.h>#include <Logging.h>#include <Eigen/Core>#include <iostream>#include <tuple>#include <vector>#include "camera/PinholeCameraIntrinsic.h"#include "pipelines/odometry/OdometryOption.h"#include "pipelines/odometry/RGBDOdometryJacobian.h"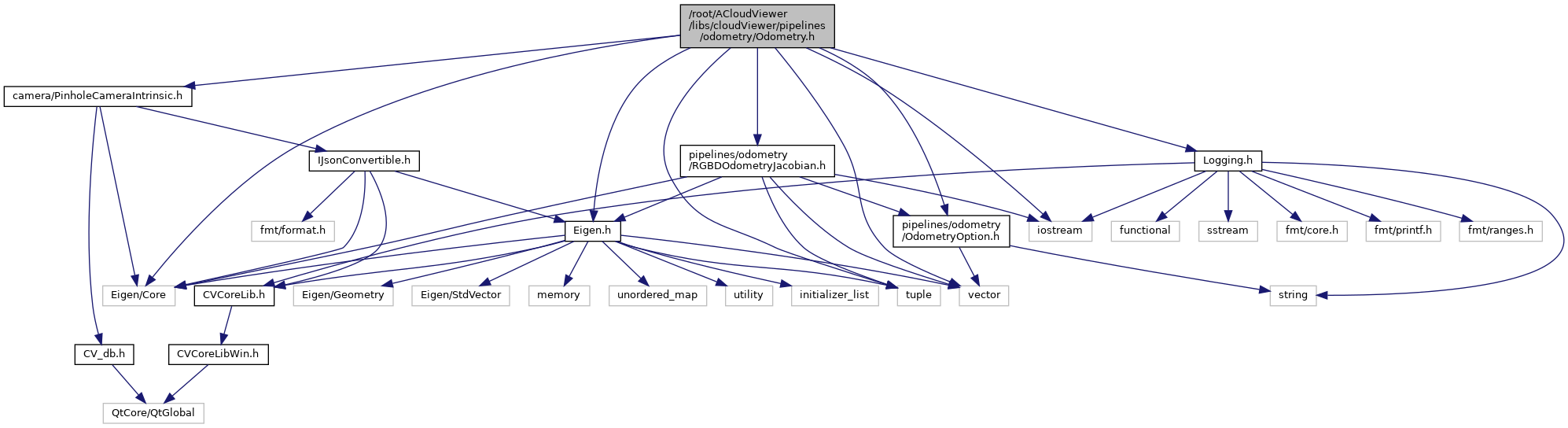

Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::geometry | |
| cloudViewer::pipelines | |
| cloudViewer::pipelines::odometry | |
Functions | |
| std::tuple< bool, Eigen::Matrix4d, Eigen::Matrix6d > | cloudViewer::pipelines::odometry::ComputeRGBDOdometry (const geometry::RGBDImage &source, const geometry::RGBDImage &target, const camera::PinholeCameraIntrinsic &pinhole_camera_intrinsic=camera::PinholeCameraIntrinsic(), const Eigen::Matrix4d &odo_init=Eigen::Matrix4d::Identity(), const RGBDOdometryJacobian &jacobian_method=RGBDOdometryJacobianFromHybridTerm(), const OdometryOption &option=OdometryOption()) |
| Function to estimate 6D rigid motion from two RGBD image pairs. More... | |