|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "pipelines/registration/ColoredICP.h"#include <Eigen.h>#include <Logging.h>#include <ecvKDTreeFlann.h>#include <ecvKDTreeSearchParam.h>#include <ecvPointCloud.h>#include <Eigen/Dense>#include <iostream>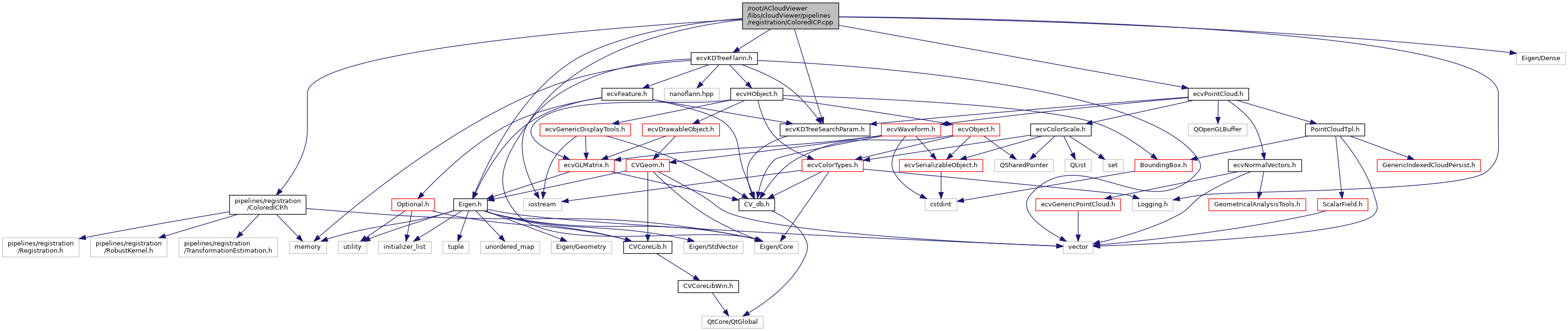
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::pipelines | |
| cloudViewer::pipelines::registration | |
Functions | |
| RegistrationResult | cloudViewer::pipelines::registration::RegistrationColoredICP (const ccPointCloud &source, const ccPointCloud &target, double max_distance, const Eigen::Matrix4d &init=Eigen::Matrix4d::Identity(), const TransformationEstimationForColoredICP &estimation=TransformationEstimationForColoredICP(), const ICPConvergenceCriteria &criteria=ICPConvergenceCriteria()) |
| Function for Colored ICP registration. More... | |
| std::vector<Eigen::Vector3d> color_gradient_ |
Definition at line 27 of file ColoredICP.cpp.