|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "pipelines/color_map/ColorMapUtils.h"#include <Image.h>#include <Parallel.h>#include <RGBDImage.h>#include <camera/PinholeCameraTrajectory.h>#include <ecvHObjectCaster.h>#include <ecvKDTreeFlann.h>#include <ecvMesh.h>#include <ecvPointCloud.h>#include "pipelines/color_map/ImageWarpingField.h"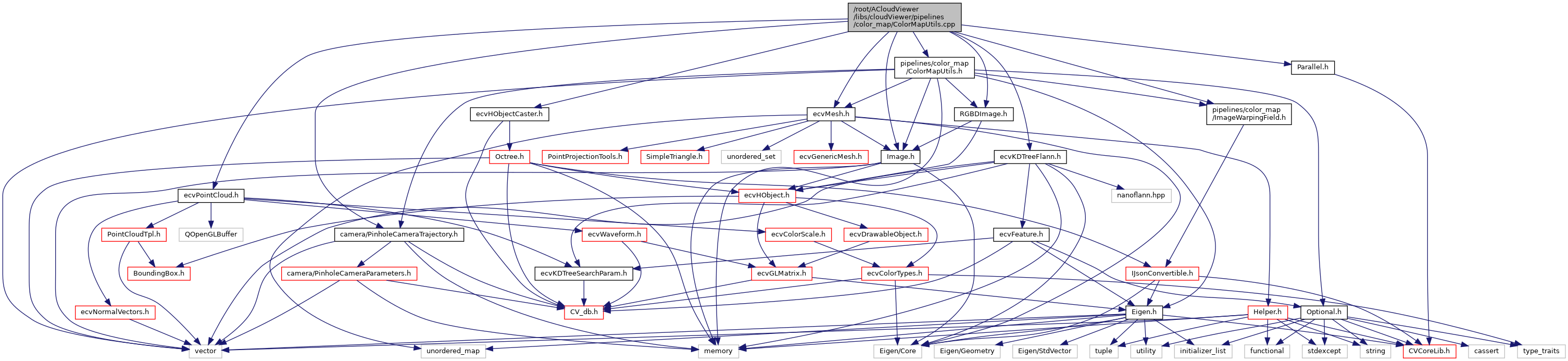
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::pipelines | |
| cloudViewer::pipelines::color_map | |
Functions | |
| static std::tuple< float, float, float > | cloudViewer::pipelines::color_map::Project3DPointAndGetUVDepth (const Eigen::Vector3d X, const camera::PinholeCameraParameters &camera_parameter) |
| template<typename T > | |
| static std::tuple< bool, T > | cloudViewer::pipelines::color_map::QueryImageIntensity (const geometry::Image &img, const utility::optional< ImageWarpingField > &optional_warping_field, const Eigen::Vector3d &V, const camera::PinholeCameraParameters &camera_parameter, utility::optional< int > channel, int image_boundary_margin) |
| std::tuple< std::vector< geometry::Image >, std::vector< geometry::Image >, std::vector< geometry::Image >, std::vector< geometry::Image >, std::vector< geometry::Image > > | cloudViewer::pipelines::color_map::CreateUtilImagesFromRGBD (const std::vector< geometry::RGBDImage > &images_rgbd) |
| std::vector< geometry::Image > | cloudViewer::pipelines::color_map::CreateDepthBoundaryMasks (const std::vector< geometry::Image > &images_depth, double depth_threshold_for_discontinuity_check, int half_dilation_kernel_size_for_discontinuity_map) |
| std::tuple< std::vector< std::vector< int > >, std::vector< std::vector< int > > > | cloudViewer::pipelines::color_map::CreateVertexAndImageVisibility (const ccMesh &mesh, const std::vector< geometry::Image > &images_depth, const std::vector< geometry::Image > &images_mask, const camera::PinholeCameraTrajectory &camera_trajectory, double maximum_allowable_depth, double depth_threshold_for_visibility_check) |
| void | cloudViewer::pipelines::color_map::SetProxyIntensityForVertex (const ccMesh &mesh, const std::vector< geometry::Image > &images_gray, const utility::optional< std::vector< ImageWarpingField >> &warping_fields, const camera::PinholeCameraTrajectory &camera_trajectory, const std::vector< std::vector< int >> &visibility_vertex_to_image, std::vector< double > &proxy_intensity, int image_boundary_margin) |
| void | cloudViewer::pipelines::color_map::SetGeometryColorAverage (ccMesh &mesh, const std::vector< geometry::Image > &images_color, const utility::optional< std::vector< ImageWarpingField >> &warping_fields, const camera::PinholeCameraTrajectory &camera_trajectory, const std::vector< std::vector< int >> &visibility_vertex_to_image, int image_boundary_margin, int invisible_vertex_color_knn) |