|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "pipelines/registration/Registration.h"#include <Logging.h>#include <benchmark/benchmark.h>#include <ecvKDTreeFlann.h>#include <ecvPointCloud.h>#include <Eigen/Eigen>#include "cloudViewer/data/Dataset.h"#include "cloudViewer/io/PointCloudIO.h"#include "cloudViewer/pipelines/registration/TransformationEstimation.h"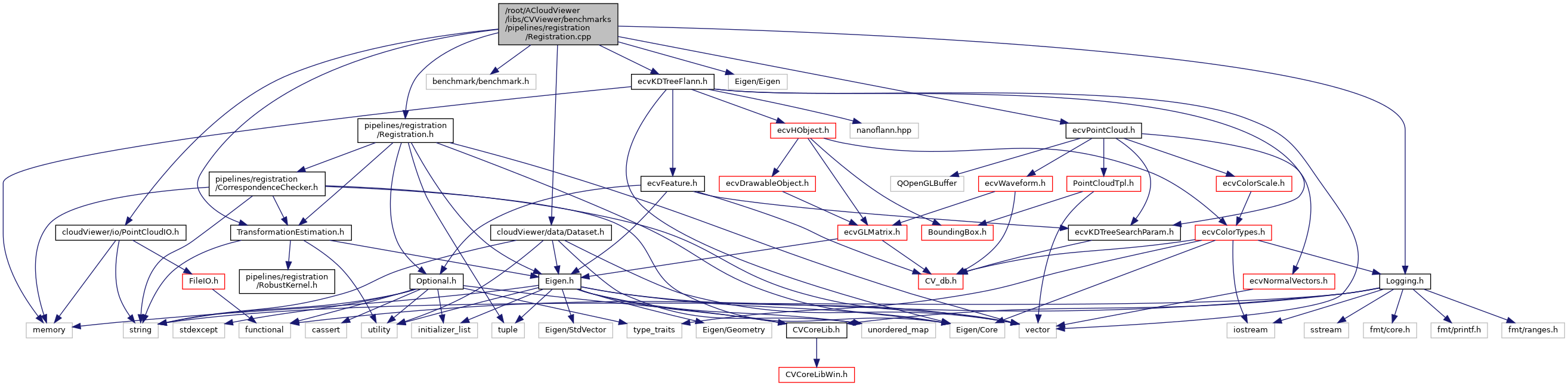
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::pipelines | |
| cloudViewer::pipelines::registration | |
Functions | |
| static std::tuple< ccPointCloud, ccPointCloud > | cloudViewer::pipelines::registration::LoadPointCloud (const std::string &source_filename, const std::string &target_filename, const double voxel_downsample_factor) |
| static void | cloudViewer::pipelines::registration::BenchmarkICPLegacy (benchmark::State &state, const TransformationEstimationType &type) |
| cloudViewer::pipelines::registration::BENCHMARK_CAPTURE (BenchmarkICPLegacy, PointToPlane/CPU, TransformationEstimationType::PointToPlane) -> Unit(benchmark::kMillisecond) | |
| cloudViewer::pipelines::registration::BENCHMARK_CAPTURE (BenchmarkICPLegacy, PointToPoint/CPU, TransformationEstimationType::PointToPoint) -> Unit(benchmark::kMillisecond) | |
Variables | |
| static const double | cloudViewer::pipelines::registration::relative_fitness = 1e-6 |
| static const double | cloudViewer::pipelines::registration::relative_rmse = 1e-6 |
| static const int | cloudViewer::pipelines::registration::max_iterations = 10 |
| static const double | cloudViewer::pipelines::registration::voxel_downsampling_factor = 0.02 |
| static const double | cloudViewer::pipelines::registration::max_correspondence_distance = 0.05 |