|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "io/sensor/azure_kinect/AzureKinectSensorConfig.h"#include <Logging.h>#include <json/json.h>#include <k4a/k4a.h>#include <map>#include <set>#include <string>#include <unordered_map>#include "io/sensor/azure_kinect/K4aPlugin.h"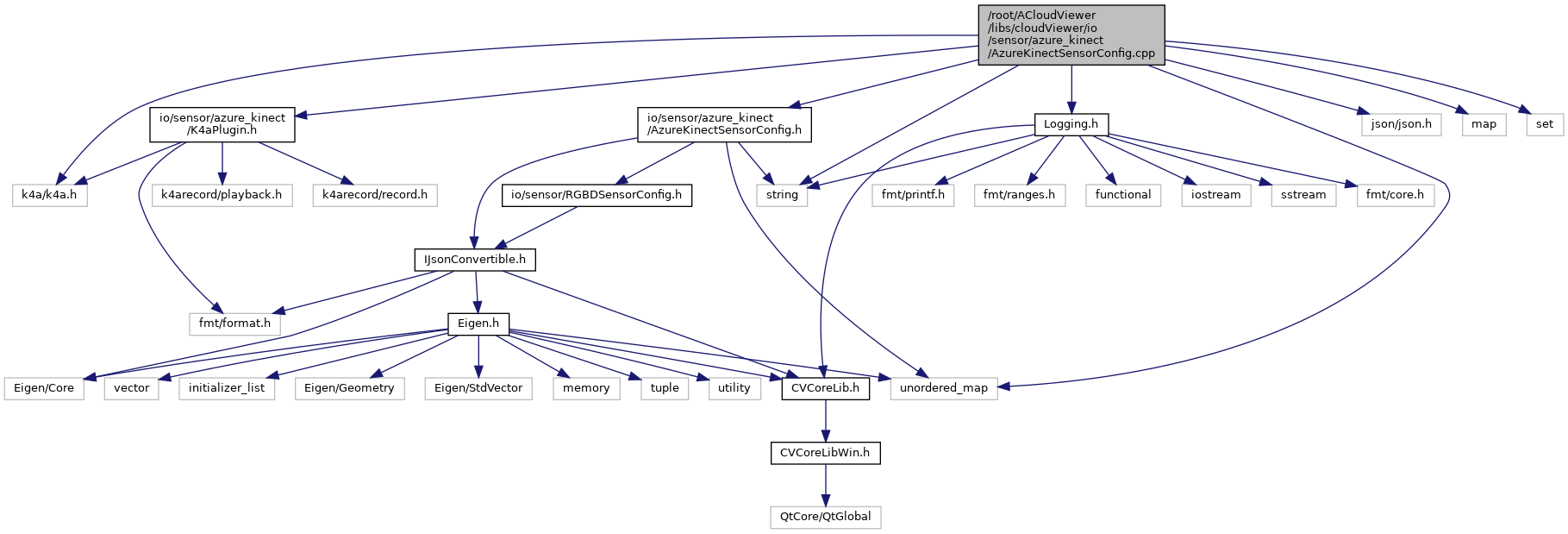
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::io | |
Functions | |
| static std::map< std::string, k4a_image_format_t > | cloudViewer::io::string_to_k4a_image_format_t ({ {"K4A_IMAGE_FORMAT_COLOR_MJPG", K4A_IMAGE_FORMAT_COLOR_MJPG}, {"K4A_IMAGE_FORMAT_COLOR_NV12", K4A_IMAGE_FORMAT_COLOR_NV12}, {"K4A_IMAGE_FORMAT_COLOR_YUY2", K4A_IMAGE_FORMAT_COLOR_YUY2}, {"K4A_IMAGE_FORMAT_COLOR_BGRA32", K4A_IMAGE_FORMAT_COLOR_BGRA32}, {"K4A_IMAGE_FORMAT_DEPTH16", K4A_IMAGE_FORMAT_DEPTH16}, {"K4A_IMAGE_FORMAT_IR16", K4A_IMAGE_FORMAT_IR16}, {"K4A_IMAGE_FORMAT_CUSTOM", K4A_IMAGE_FORMAT_CUSTOM}, }) |
Variables | |
| static std::map< k4a_image_format_t, std::string > | cloudViewer::io::k4a_image_format_t_to_string |
| static std::map< k4a_color_resolution_t, std::string > | cloudViewer::io::k4a_color_resolution_t_to_string |
| static std::map< k4a_depth_mode_t, std::string > | cloudViewer::io::k4a_depth_mode_t_to_string |
| static std::map< k4a_fps_t, std::string > | cloudViewer::io::k4a_fps_t_to_string |
| static std::map< k4a_wired_sync_mode_t, std::string > | cloudViewer::io::k4a_wired_sync_mode_t_to_string |
| static std::map< std::string, k4a_color_resolution_t > | cloudViewer::io::string_to_k4a_color_resolution_t |
| static std::map< std::string, k4a_depth_mode_t > | cloudViewer::io::string_to_k4a_depth_mode_t |
| static std::map< std::string, k4a_fps_t > | cloudViewer::io::string_to_k4a_fps_t |
| static std::map< std::string, k4a_wired_sync_mode_t > | cloudViewer::io::string_to_k4a_wired_sync_mode_t |
| static std::unordered_map< std::string, std::string > | cloudViewer::io::standard_config |