|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
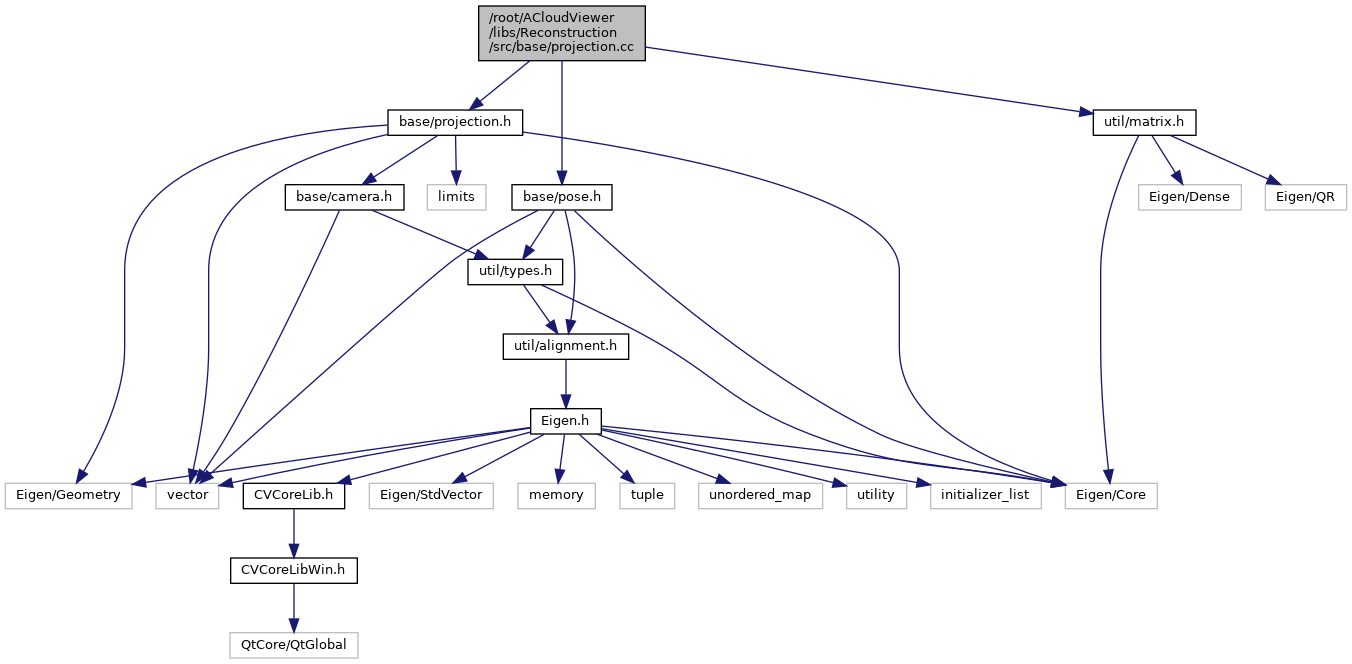
Go to the source code of this file.
Namespaces | |
| colmap | |
Functions | |
| Eigen::Matrix3x4d | colmap::ComposeProjectionMatrix (const Eigen::Vector4d &qvec, const Eigen::Vector3d &tvec) |
| Eigen::Matrix3x4d | colmap::ComposeProjectionMatrix (const Eigen::Matrix3d &R, const Eigen::Vector3d &T) |
| Eigen::Matrix3x4d | colmap::InvertProjectionMatrix (const Eigen::Matrix3x4d &proj_matrix) |
| Eigen::Matrix3d | colmap::ComputeClosestRotationMatrix (const Eigen::Matrix3d &matrix) |
| bool | colmap::DecomposeProjectionMatrix (const Eigen::Matrix3x4d &P, Eigen::Matrix3d *K, Eigen::Matrix3d *R, Eigen::Vector3d *T) |
| Eigen::Vector2d | colmap::ProjectPointToImage (const Eigen::Vector3d &point3D, const Eigen::Matrix3x4d &proj_matrix, const Camera &camera) |
| double | colmap::CalculateSquaredReprojectionError (const Eigen::Vector2d &point2D, const Eigen::Vector3d &point3D, const Eigen::Vector4d &qvec, const Eigen::Vector3d &tvec, const Camera &camera) |
| double | colmap::CalculateSquaredReprojectionError (const Eigen::Vector2d &point2D, const Eigen::Vector3d &point3D, const Eigen::Matrix3x4d &proj_matrix, const Camera &camera) |
| double | colmap::CalculateAngularError (const Eigen::Vector2d &point2D, const Eigen::Vector3d &point3D, const Eigen::Vector4d &qvec, const Eigen::Vector3d &tvec, const Camera &camera) |
| double | colmap::CalculateAngularError (const Eigen::Vector2d &point2D, const Eigen::Vector3d &point3D, const Eigen::Matrix3x4d &proj_matrix, const Camera &camera) |
| double | colmap::CalculateNormalizedAngularError (const Eigen::Vector2d &point2D, const Eigen::Vector3d &point3D, const Eigen::Vector4d &qvec, const Eigen::Vector3d &tvec) |
| double | colmap::CalculateNormalizedAngularError (const Eigen::Vector2d &point2D, const Eigen::Vector3d &point3D, const Eigen::Matrix3x4d &proj_matrix) |
| double | colmap::CalculateDepth (const Eigen::Matrix3x4d &proj_matrix, const Eigen::Vector3d &point3D) |
| bool | colmap::HasPointPositiveDepth (const Eigen::Matrix3x4d &proj_matrix, const Eigen::Vector3d &point3D) |