|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "util/testing.h"#include <Eigen/Core>#include "base/pose.h"#include "base/projection.h"#include "util/math.h"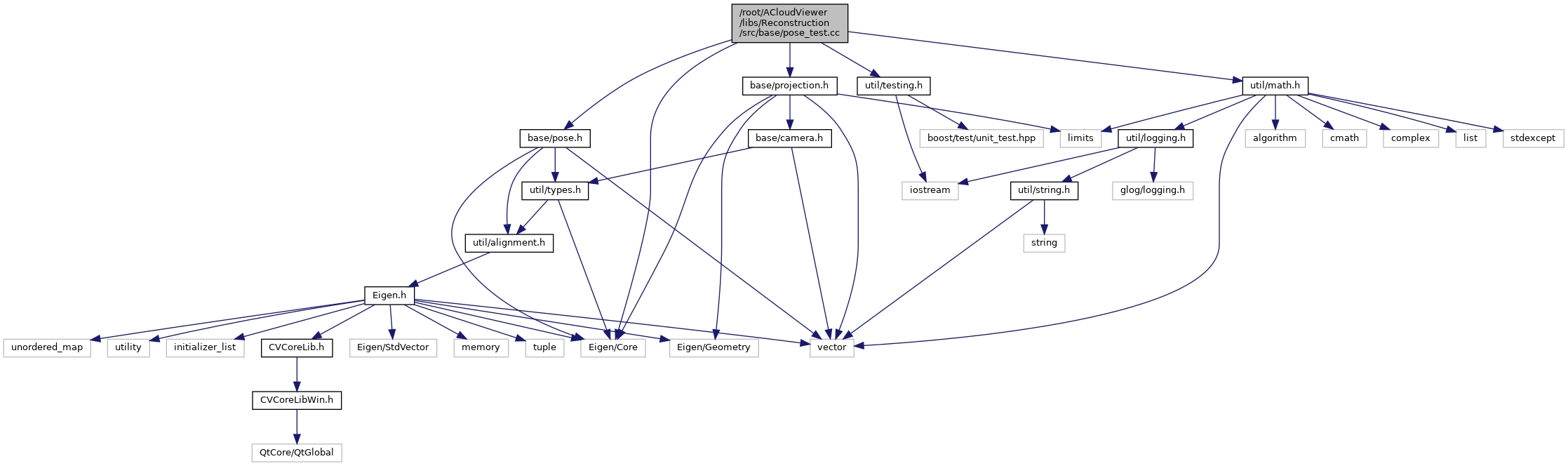
Go to the source code of this file.
Macros | |
| #define | TEST_NAME "base/pose" |
Functions | |
| BOOST_AUTO_TEST_CASE (TestCrossProductMatrix) | |
| BOOST_AUTO_TEST_CASE (TestEulerAnglesX) | |
| BOOST_AUTO_TEST_CASE (TestEulerAnglesY) | |
| BOOST_AUTO_TEST_CASE (TestEulerAnglesZ) | |
| BOOST_AUTO_TEST_CASE (TestEulerAnglesXYZ) | |
| BOOST_AUTO_TEST_CASE (TestQuaternionToRotationMatrix) | |
| BOOST_AUTO_TEST_CASE (TestComposeIdentityQuaternion) | |
| BOOST_AUTO_TEST_CASE (TestNormalizeQuaternion) | |
| BOOST_AUTO_TEST_CASE (TestInvertQuaternion) | |
| BOOST_AUTO_TEST_CASE (TestConcatenateQuaternions) | |
| BOOST_AUTO_TEST_CASE (TestQuaternionRotatePoint) | |
| BOOST_AUTO_TEST_CASE (TestAverageQuaternions) | |
| BOOST_AUTO_TEST_CASE (TestRotationFromUnitVectors) | |
| BOOST_AUTO_TEST_CASE (TestPoseFromProjectionMatrix) | |
| BOOST_AUTO_TEST_CASE (TestPoseFromProjectionParameters) | |
| BOOST_AUTO_TEST_CASE (TestComputeRelativePose) | |
| BOOST_AUTO_TEST_CASE (TestConcatenatePoses) | |
| BOOST_AUTO_TEST_CASE (TestInvertPose) | |
| BOOST_AUTO_TEST_CASE (TestInterpolatePose) | |
| BOOST_AUTO_TEST_CASE (TestCalculateBaseline) | |
| BOOST_AUTO_TEST_CASE (TestCheckCheirality) | |
| #define TEST_NAME "base/pose" |
Definition at line 32 of file pose_test.cc.
| BOOST_AUTO_TEST_CASE | ( | TestAverageQuaternions | ) |
Definition at line 188 of file pose_test.cc.
References colmap::AverageQuaternions(), colmap::ComposeIdentityQuaternion(), and e.
| BOOST_AUTO_TEST_CASE | ( | TestCalculateBaseline | ) |
Definition at line 382 of file pose_test.cc.
References colmap::CalculateBaseline(), and e.
| BOOST_AUTO_TEST_CASE | ( | TestCheckCheirality | ) |
Definition at line 398 of file pose_test.cc.
References colmap::CheckCheirality().
| BOOST_AUTO_TEST_CASE | ( | TestComposeIdentityQuaternion | ) |
Definition at line 117 of file pose_test.cc.
References colmap::ComposeIdentityQuaternion().
| BOOST_AUTO_TEST_CASE | ( | TestComputeRelativePose | ) |
Definition at line 272 of file pose_test.cc.
References colmap::ComposeIdentityQuaternion(), colmap::ComputeRelativePose(), and e.
| BOOST_AUTO_TEST_CASE | ( | TestConcatenatePoses | ) |
Definition at line 313 of file pose_test.cc.
References colmap::ComposeIdentityQuaternion(), colmap::ComputeRelativePose(), colmap::ConcatenatePoses(), and colmap::NormalizeQuaternion().
| BOOST_AUTO_TEST_CASE | ( | TestConcatenateQuaternions | ) |
Definition at line 148 of file pose_test.cc.
References colmap::ComposeIdentityQuaternion(), colmap::ConcatenateQuaternions(), and colmap::InvertQuaternion().
| BOOST_AUTO_TEST_CASE | ( | TestCrossProductMatrix | ) |
Definition at line 43 of file pose_test.cc.
References colmap::CrossProductMatrix().
| BOOST_AUTO_TEST_CASE | ( | TestEulerAnglesX | ) |
Definition at line 51 of file pose_test.cc.
References e, colmap::EulerAnglesToRotationMatrix(), and colmap::RotationMatrixToEulerAngles().
| BOOST_AUTO_TEST_CASE | ( | TestEulerAnglesXYZ | ) |
Definition at line 93 of file pose_test.cc.
References e, colmap::EulerAnglesToRotationMatrix(), and colmap::RotationMatrixToEulerAngles().
| BOOST_AUTO_TEST_CASE | ( | TestEulerAnglesY | ) |
Definition at line 65 of file pose_test.cc.
References e, colmap::EulerAnglesToRotationMatrix(), and colmap::RotationMatrixToEulerAngles().
| BOOST_AUTO_TEST_CASE | ( | TestEulerAnglesZ | ) |
Definition at line 79 of file pose_test.cc.
References e, colmap::EulerAnglesToRotationMatrix(), and colmap::RotationMatrixToEulerAngles().
| BOOST_AUTO_TEST_CASE | ( | TestInterpolatePose | ) |
Definition at line 363 of file pose_test.cc.
References colmap::InterpolatePose().
| BOOST_AUTO_TEST_CASE | ( | TestInvertPose | ) |
Definition at line 347 of file pose_test.cc.
References colmap::ComposeIdentityQuaternion(), and colmap::InvertPose().
| BOOST_AUTO_TEST_CASE | ( | TestInvertQuaternion | ) |
Definition at line 138 of file pose_test.cc.
References colmap::ComposeIdentityQuaternion(), and colmap::InvertQuaternion().
| BOOST_AUTO_TEST_CASE | ( | TestNormalizeQuaternion | ) |
Definition at line 121 of file pose_test.cc.
References colmap::ComposeIdentityQuaternion(), and colmap::NormalizeQuaternion().
| BOOST_AUTO_TEST_CASE | ( | TestPoseFromProjectionMatrix | ) |
Definition at line 254 of file pose_test.cc.
References colmap::ComposeProjectionMatrix(), e, colmap::InvertProjectionMatrix(), and colmap::ProjectionCenterFromMatrix().
| BOOST_AUTO_TEST_CASE | ( | TestPoseFromProjectionParameters | ) |
Definition at line 263 of file pose_test.cc.
References colmap::ComposeProjectionMatrix(), e, colmap::InvertProjectionMatrix(), and colmap::ProjectionCenterFromPose().
| BOOST_AUTO_TEST_CASE | ( | TestQuaternionRotatePoint | ) |
Definition at line 168 of file pose_test.cc.
References colmap::ComposeIdentityQuaternion(), colmap::EulerAnglesToRotationMatrix(), M_PI, colmap::QuaternionRotatePoint(), and colmap::RotationMatrixToQuaternion().
| BOOST_AUTO_TEST_CASE | ( | TestQuaternionToRotationMatrix | ) |
Definition at line 107 of file pose_test.cc.
References colmap::EulerAnglesToRotationMatrix(), colmap::QuaternionToRotationMatrix(), and colmap::RotationMatrixToQuaternion().
| BOOST_AUTO_TEST_CASE | ( | TestRotationFromUnitVectors | ) |
Definition at line 228 of file pose_test.cc.
References colmap::RotationFromUnitVectors().