|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <bundle_adjustment.h>
Public Member Functions | |
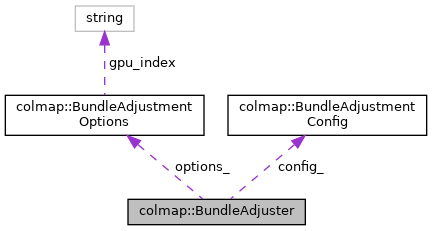
| BundleAdjuster (const BundleAdjustmentOptions &options, const BundleAdjustmentConfig &config) | |
| bool | Solve (Reconstruction *reconstruction) |
| const ceres::Solver::Summary & | Summary () const |
Protected Member Functions | |
| void | ParameterizeCameras (Reconstruction *reconstruction) |
| void | ParameterizePoints (Reconstruction *reconstruction) |
Protected Attributes | |
| const BundleAdjustmentOptions | options_ |
| BundleAdjustmentConfig | config_ |
| std::unique_ptr< ceres::Problem > | problem_ |
| ceres::Solver::Summary | summary_ |
| std::unordered_set< camera_t > | camera_ids_ |
| std::unordered_map< point3D_t, size_t > | point3D_num_observations_ |
Definition at line 172 of file bundle_adjustment.h.
| colmap::BundleAdjuster::BundleAdjuster | ( | const BundleAdjustmentOptions & | options, |
| const BundleAdjustmentConfig & | config | ||
| ) |
Definition at line 366 of file bundle_adjustment.cc.
|
protected |
Definition at line 572 of file bundle_adjustment.cc.
References colmap::Reconstruction::Camera(), camera_ids_, config_, colmap::Camera::ExtraParamsIdxs(), colmap::Camera::FocalLengthIdxs(), colmap::BundleAdjustmentConfig::IsConstantCamera(), colmap::Camera::NumParams(), options_, colmap::Camera::ParamsData(), colmap::Camera::PrincipalPointIdxs(), problem_, colmap::BundleAdjustmentOptions::refine_extra_params, colmap::BundleAdjustmentOptions::refine_focal_length, colmap::BundleAdjustmentOptions::refine_principal_point, and colmap::SetSubsetManifold().
|
protected |
Definition at line 623 of file bundle_adjustment.cc.
References config_, colmap::BundleAdjustmentConfig::ConstantPoints(), colmap::Track::Length(), colmap::Reconstruction::Point3D(), point3D_num_observations_, problem_, colmap::Point3D::Track(), and colmap::Point3D::XYZ().
| bool colmap::BundleAdjuster::Solve | ( | Reconstruction * | reconstruction | ) |
Definition at line 372 of file bundle_adjustment.cc.
References config_, colmap::BundleAdjustmentOptions::CreateLossFunction(), colmap::BundleAdjustmentOptions::CreateSolverOptions(), QtCompat::endl(), options_, colmap::BundleAdjustmentOptions::print_summary, colmap::PrintHeading2(), colmap::PrintSolverSummary(), problem_, cloudViewer::core::Solve(), and summary_.
Referenced by colmap::IncrementalMapper::AdjustGlobalBundle(), colmap::IncrementalMapper::AdjustLocalBundle(), BOOST_AUTO_TEST_CASE(), and colmap::RunPointTriangulator().
| const ceres::Solver::Summary & colmap::BundleAdjuster::Summary | ( | ) | const |
Definition at line 404 of file bundle_adjustment.cc.
References summary_.
Referenced by colmap::IncrementalMapper::AdjustLocalBundle(), and BOOST_AUTO_TEST_CASE().
|
protected |
Definition at line 203 of file bundle_adjustment.h.
Referenced by ParameterizeCameras().
|
protected |
Definition at line 200 of file bundle_adjustment.h.
Referenced by ParameterizeCameras(), ParameterizePoints(), Solve(), and colmap::RigBundleAdjuster::Solve().
|
protected |
Definition at line 199 of file bundle_adjustment.h.
Referenced by ParameterizeCameras(), Solve(), and colmap::RigBundleAdjuster::Solve().
|
protected |
Definition at line 204 of file bundle_adjustment.h.
Referenced by ParameterizePoints().
|
protected |
Definition at line 201 of file bundle_adjustment.h.
Referenced by ParameterizeCameras(), ParameterizePoints(), Solve(), and colmap::RigBundleAdjuster::Solve().
|
protected |
Definition at line 202 of file bundle_adjustment.h.
Referenced by Solve(), colmap::RigBundleAdjuster::Solve(), and Summary().