|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
Public Member Functions | |
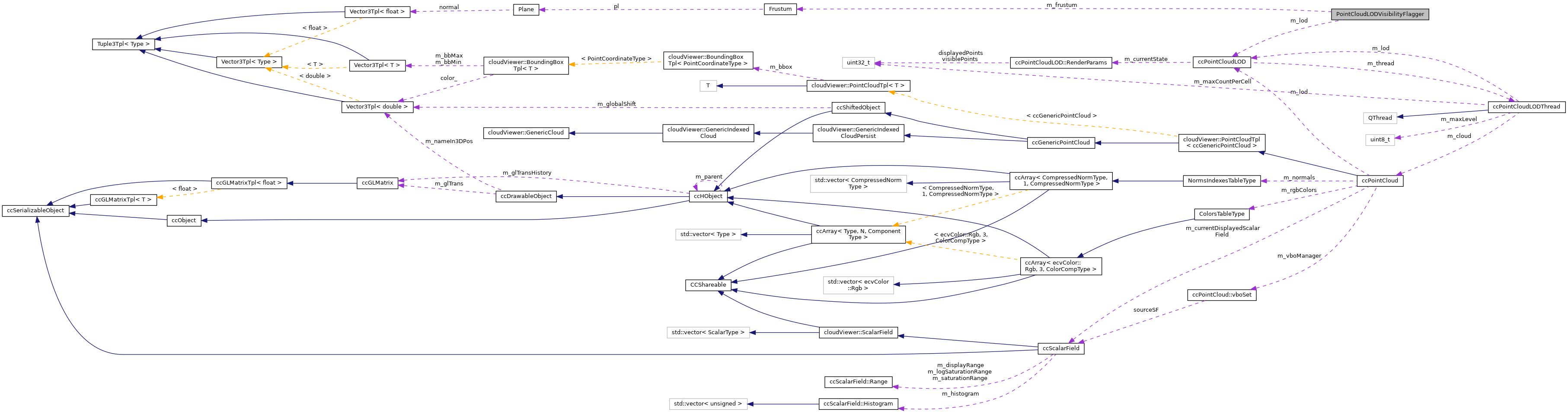
| PointCloudLODVisibilityFlagger (ccPointCloudLOD &lod, const Frustum &frustum, unsigned char maxLevel) | |
| void | setClipPlanes (const ccClipPlaneSet &clipPlanes) |
| void | propagateFlag (ccPointCloudLOD::Node &node, uint8_t flag) |
| uint32_t | flag (ccPointCloudLOD::Node &node) |
Public Attributes | |
| ccPointCloudLOD & | m_lod |
| const Frustum & | m_frustum |
| unsigned char | m_maxLevel |
| ccClipPlaneSet | m_clipPlanes |
| bool | m_hasClipPlanes |
Definition at line 541 of file ecvPointCloudLOD.cpp.
|
inline |
Definition at line 543 of file ecvPointCloudLOD.cpp.
|
inline |
Definition at line 575 of file ecvPointCloudLOD.cpp.
References ccPointCloudLOD::Node::center, ccPointCloudLOD::Node::childCount, ccPointCloudLOD::Node::childIndexes, Frustum::INSIDE, Frustum::INTERSECT, ccPointCloudLOD::Node::intersection, ccPointCloudLOD::Node::level, m_clipPlanes, m_frustum, m_hasClipPlanes, m_lod, m_maxLevel, ccPointCloudLOD::node(), Frustum::OUTSIDE, ccPointCloudLOD::Node::pointCount, propagateFlag(), ccPointCloudLOD::Node::radius, Frustum::sphereInFrustum(), Tuple4Tpl< Type >::w, Tuple3Tpl< Type >::x, Tuple4Tpl< Type >::x, Tuple3Tpl< Type >::y, Tuple4Tpl< Type >::y, Tuple3Tpl< Type >::z, and Tuple4Tpl< Type >::z.
Referenced by ccPointCloudLOD::flagVisibility(), and propagateFlag().
|
inline |
Definition at line 561 of file ecvPointCloudLOD.cpp.
References ccPointCloudLOD::Node::childCount, ccPointCloudLOD::Node::childIndexes, flag(), ccPointCloudLOD::Node::intersection, ccPointCloudLOD::Node::level, m_lod, and ccPointCloudLOD::node().
Referenced by flag().
|
inline |
Definition at line 551 of file ecvPointCloudLOD.cpp.
References m_clipPlanes, and m_hasClipPlanes.
Referenced by ccPointCloudLOD::flagVisibility().
| ccClipPlaneSet PointCloudLODVisibilityFlagger::m_clipPlanes |
Definition at line 642 of file ecvPointCloudLOD.cpp.
Referenced by flag(), and setClipPlanes().
| const Frustum& PointCloudLODVisibilityFlagger::m_frustum |
Definition at line 640 of file ecvPointCloudLOD.cpp.
Referenced by flag().
| bool PointCloudLODVisibilityFlagger::m_hasClipPlanes |
Definition at line 643 of file ecvPointCloudLOD.cpp.
Referenced by flag(), and setClipPlanes().
| ccPointCloudLOD& PointCloudLODVisibilityFlagger::m_lod |
Definition at line 639 of file ecvPointCloudLOD.cpp.
Referenced by flag(), and propagateFlag().
| unsigned char PointCloudLODVisibilityFlagger::m_maxLevel |
Definition at line 641 of file ecvPointCloudLOD.cpp.
Referenced by flag().