|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
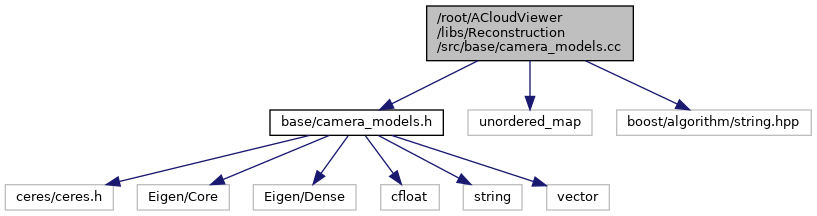
Go to the source code of this file.
Namespaces | |
| colmap | |
Macros | |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
| #define | CAMERA_MODEL_CASE(CameraModel) |
Functions | |
| CAMERA_MODEL_CASES std::unordered_map< std::string, int > | colmap::InitialzeCameraModelNameToId () |
| std::unordered_map< int, std::string > | colmap::InitialzeCameraModelIdToName () |
| bool | colmap::ExistsCameraModelWithName (const std::string &model_name) |
| bool | colmap::ExistsCameraModelWithId (const int model_id) |
| int | colmap::CameraModelNameToId (const std::string &model_name) |
| std::string | colmap::CameraModelIdToName (const int model_id) |
| std::vector< double > | colmap::CameraModelInitializeParams (const int model_id, const double focal_length, const size_t width, const size_t height) |
| std::string | colmap::CameraModelParamsInfo (const int model_id) |
| const std::vector< size_t > & | colmap::CameraModelFocalLengthIdxs (const int model_id) |
| const std::vector< size_t > & | colmap::CameraModelPrincipalPointIdxs (const int model_id) |
| const std::vector< size_t > & | colmap::CameraModelExtraParamsIdxs (const int model_id) |
| size_t | colmap::CameraModelNumParams (const int model_id) |
| bool | colmap::CameraModelVerifyParams (const int model_id, const std::vector< double > ¶ms) |
| bool | colmap::CameraModelHasBogusParams (const int model_id, const std::vector< double > ¶ms, const size_t width, const size_t height, const double min_focal_length_ratio, const double max_focal_length_ratio, const double max_extra_param) |
Variables | |
| static const std::unordered_map< std::string, int > | colmap::CAMERA_MODEL_NAME_TO_ID |
| static const std::unordered_map< int, std::string > | colmap::CAMERA_MODEL_ID_TO_NAME |
| static const std::vector< size_t > | colmap::EMPTY_IDXS |
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.
| #define CAMERA_MODEL_CASE | ( | CameraModel | ) |
Definition at line 42 of file camera_models.cc.