|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
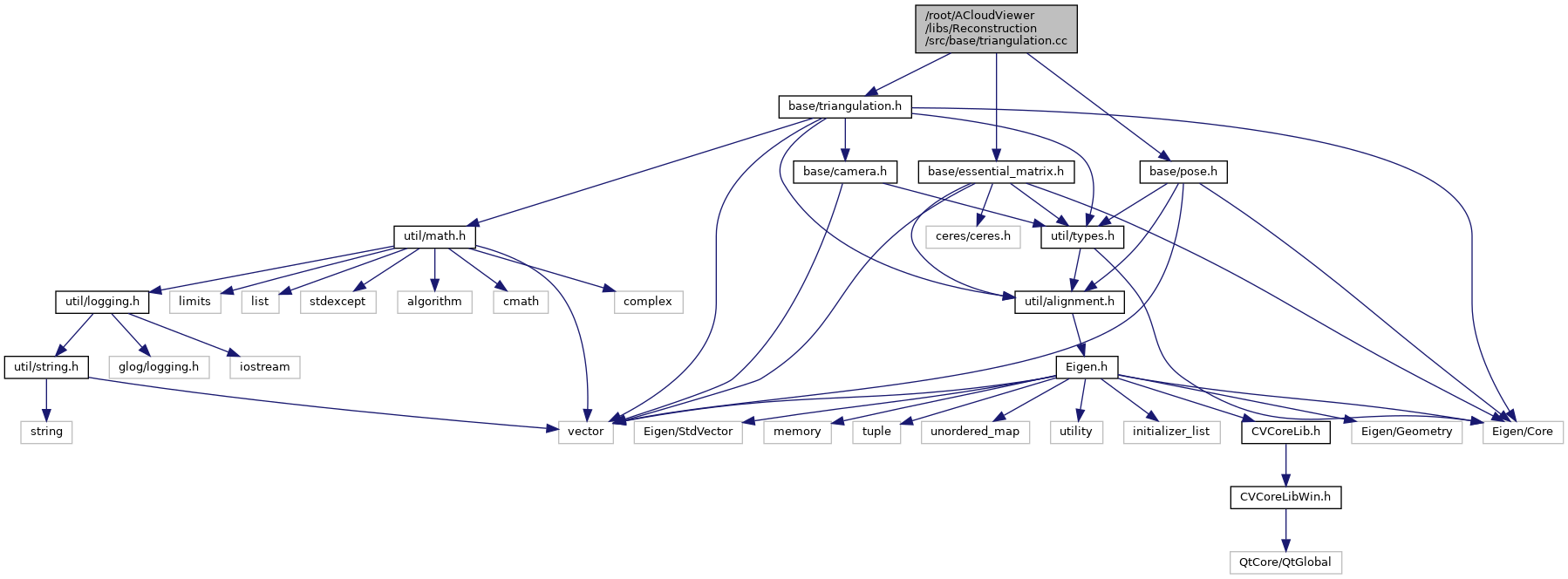
Go to the source code of this file.
Namespaces | |
| colmap | |
Functions | |
| Eigen::Vector3d | colmap::TriangulatePoint (const Eigen::Matrix3x4d &proj_matrix1, const Eigen::Matrix3x4d &proj_matrix2, const Eigen::Vector2d &point1, const Eigen::Vector2d &point2) |
| std::vector< Eigen::Vector3d > | colmap::TriangulatePoints (const Eigen::Matrix3x4d &proj_matrix1, const Eigen::Matrix3x4d &proj_matrix2, const std::vector< Eigen::Vector2d > &points1, const std::vector< Eigen::Vector2d > &points2) |
| Eigen::Vector3d | colmap::TriangulateMultiViewPoint (const std::vector< Eigen::Matrix3x4d > &proj_matrices, const std::vector< Eigen::Vector2d > &points) |
| Eigen::Vector3d | colmap::TriangulateOptimalPoint (const Eigen::Matrix3x4d &proj_matrix1, const Eigen::Matrix3x4d &proj_matrix2, const Eigen::Vector2d &point1, const Eigen::Vector2d &point2) |
| std::vector< Eigen::Vector3d > | colmap::TriangulateOptimalPoints (const Eigen::Matrix3x4d &proj_matrix1, const Eigen::Matrix3x4d &proj_matrix2, const std::vector< Eigen::Vector2d > &points1, const std::vector< Eigen::Vector2d > &points2) |
| double | colmap::CalculateTriangulationAngle (const Eigen::Vector3d &proj_center1, const Eigen::Vector3d &proj_center2, const Eigen::Vector3d &point3D) |
| std::vector< double > | colmap::CalculateTriangulationAngles (const Eigen::Vector3d &proj_center1, const Eigen::Vector3d &proj_center2, const std::vector< Eigen::Vector3d > &points3D) |