|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "util/testing.h"#include <Eigen/Geometry>#include "base/essential_matrix.h"#include "base/pose.h"#include "base/projection.h"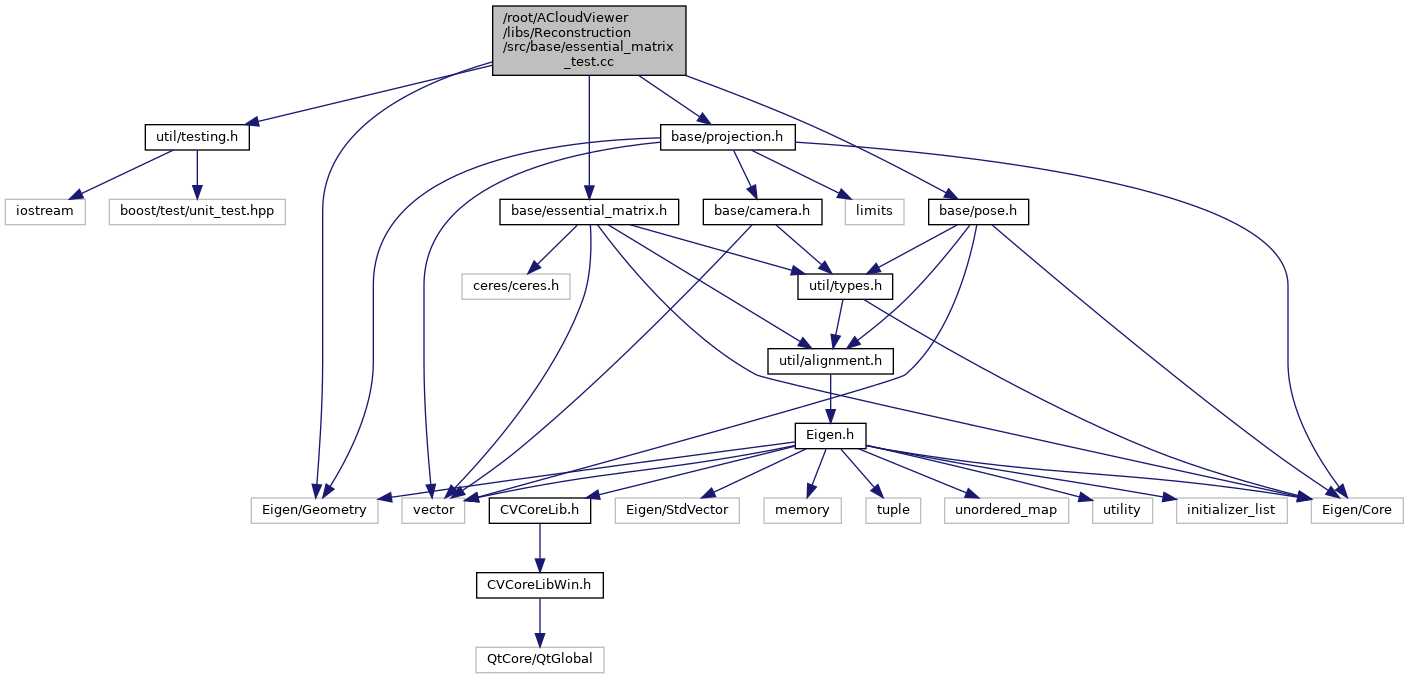
Go to the source code of this file.
Macros | |
| #define | TEST_NAME "base/essential_matrix" |
Functions | |
| BOOST_AUTO_TEST_CASE (TestDecomposeEssentialMatrix) | |
| BOOST_AUTO_TEST_CASE (TestEssentialMatrixFromPose) | |
| BOOST_AUTO_TEST_CASE (TestEssentialMatrixFromPoses) | |
| BOOST_AUTO_TEST_CASE (TestPoseFromEssentialMatrix) | |
| BOOST_AUTO_TEST_CASE (TestFindOptimalImageObservations) | |
| BOOST_AUTO_TEST_CASE (TestEpipoleFromEssentialMatrix) | |
| BOOST_AUTO_TEST_CASE (TestInvertEssentialMatrix) | |
| BOOST_AUTO_TEST_CASE (TestRefineEssentialMatrix) | |
| #define TEST_NAME "base/essential_matrix" |
Definition at line 32 of file essential_matrix_test.cc.
| BOOST_AUTO_TEST_CASE | ( | TestDecomposeEssentialMatrix | ) |
Definition at line 43 of file essential_matrix_test.cc.
References colmap::DecomposeEssentialMatrix(), e, colmap::EssentialMatrixFromPose(), and colmap::EulerAnglesToRotationMatrix().
| BOOST_AUTO_TEST_CASE | ( | TestEpipoleFromEssentialMatrix | ) |
Definition at line 147 of file essential_matrix_test.cc.
References colmap::EpipoleFromEssentialMatrix(), colmap::EssentialMatrixFromPose(), and colmap::EulerAnglesToRotationMatrix().
| BOOST_AUTO_TEST_CASE | ( | TestEssentialMatrixFromPose | ) |
Definition at line 57 of file essential_matrix_test.cc.
References colmap::EssentialMatrixFromPose(), and colmap::EulerAnglesToRotationMatrix().
| BOOST_AUTO_TEST_CASE | ( | TestEssentialMatrixFromPoses | ) |
Definition at line 68 of file essential_matrix_test.cc.
References colmap::ComposeProjectionMatrix(), e, colmap::EssentialMatrixFromAbsolutePoses(), colmap::EssentialMatrixFromPose(), and colmap::EulerAnglesToRotationMatrix().
| BOOST_AUTO_TEST_CASE | ( | TestFindOptimalImageObservations | ) |
Definition at line 116 of file essential_matrix_test.cc.
References colmap::ComposeProjectionMatrix(), colmap::EssentialMatrixFromPose(), colmap::EulerAnglesToRotationMatrix(), and colmap::FindOptimalImageObservations().
| BOOST_AUTO_TEST_CASE | ( | TestInvertEssentialMatrix | ) |
Definition at line 158 of file essential_matrix_test.cc.
References colmap::EssentialMatrixFromPose(), colmap::EulerAnglesToRotationMatrix(), and colmap::InvertEssentialMatrix().
| BOOST_AUTO_TEST_CASE | ( | TestPoseFromEssentialMatrix | ) |
Definition at line 81 of file essential_matrix_test.cc.
References colmap::ComposeProjectionMatrix(), colmap::EssentialMatrixFromPose(), colmap::EulerAnglesToRotationMatrix(), and colmap::PoseFromEssentialMatrix().
| BOOST_AUTO_TEST_CASE | ( | TestRefineEssentialMatrix | ) |
Definition at line 169 of file essential_matrix_test.cc.
References colmap::ComposeProjectionMatrix(), colmap::EssentialMatrixFromPose(), colmap::EulerAnglesToRotationMatrix(), and colmap::RefineEssentialMatrix().