#include <CVShareable.h>
#include <CVTypes.h>
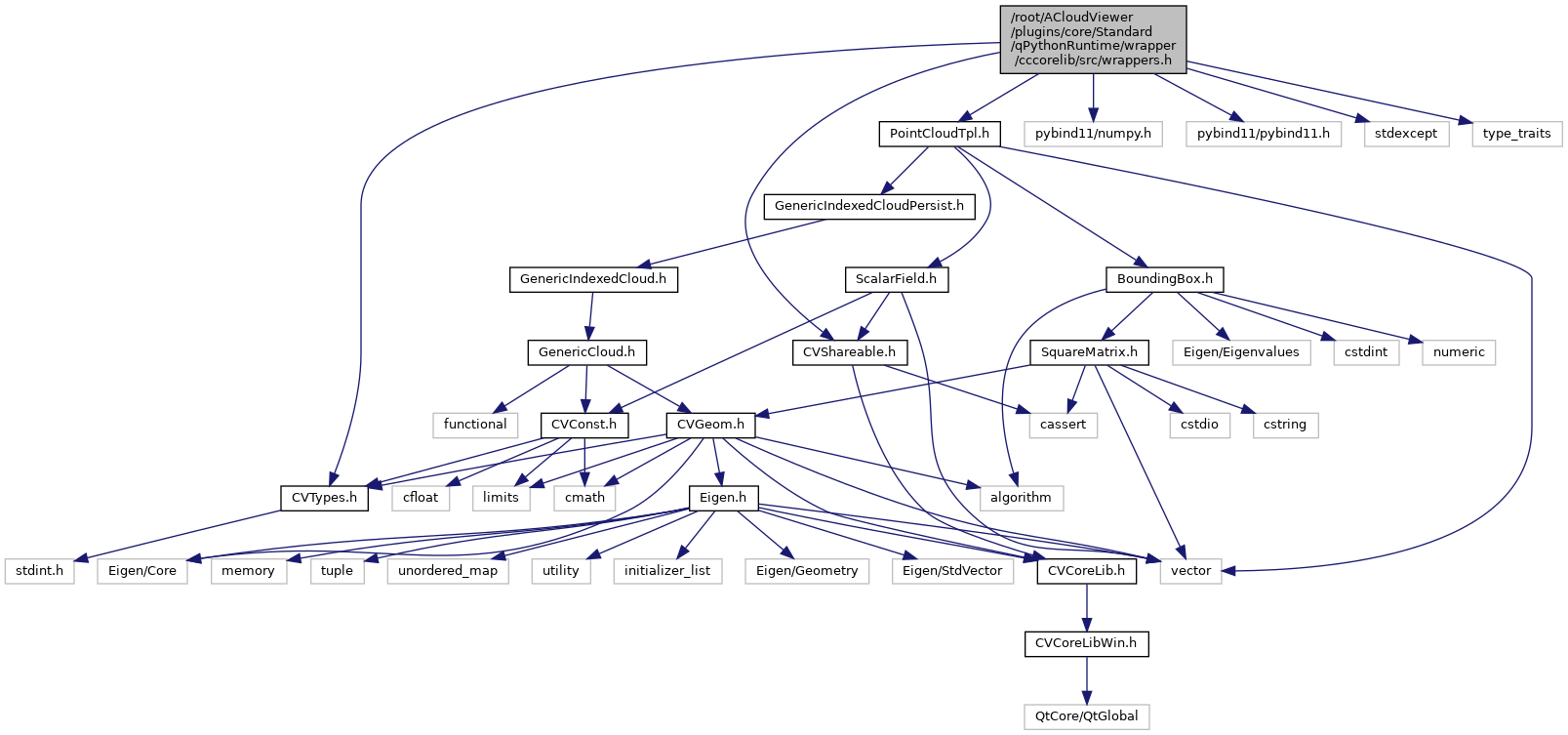
#include <PointCloudTpl.h>
#include <pybind11/numpy.h>
#include <pybind11/pybind11.h>
#include <stdexcept>
#include <type_traits>
Go to the source code of this file.
|
| template<class T > |
| using | observer_ptr = std::unique_ptr< T, py::nodelete > |
| | A unique_ptr that never free its ptr. More...
|
| |
◆ DEFINE_POINTCLOUDTPL
| #define DEFINE_POINTCLOUDTPL |
( |
|
T, |
|
|
|
module, |
|
|
|
name |
|
) |
| |
◆ observer_ptr
A unique_ptr that never free its ptr.
Definition at line 24 of file wrappers.h.
◆ PYBIND11_DECLARE_HOLDER_TYPE()
◆ ADD_SCALAR_FIELD_DOCSTRING
| constexpr const char ADD_SCALAR_FIELD_DOCSTRING[] |
|
staticconstexpr |
Initial value:= R"doc(
Adds a scalar field with the given name to the point cloud.
Parameters
----------
name: str
name of the scalar field that will be added.
values: optional, numpy.array, list of float
values to use when initializing the new scalar field
Raises
------
RuntimeError if the point cloud already has a scalar field with the given ``name``
ValueError if values are provided don't have the same length (size) as the point cloud
)doc"
Definition at line 127 of file wrappers.h.
◆ SIZE_SCALAR_FIELD_DOCSTRING
| constexpr const char SIZE_SCALAR_FIELD_DOCSTRING[] |
|
staticconstexpr |
Initial value:= R"doc(
Returns the size (number of points) in the point cloud.
``len`` also works as an alias to size.
.. code:: Python
pc = pycc.ccPointCloud("name")
assert len(pc) == pc.size()
)doc"
Definition at line 144 of file wrappers.h.