|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <DgmOctree.h>
Public Member Functions | |
| void | prepare (PointCoordinateType radius, PointCoordinateType cellSize) |
| Updates maxD2 and minD2 with search radius and cellSize. More... | |
| NearestNeighboursSphericalSearchStruct () | |
 Public Member Functions inherited from cloudViewer::DgmOctree::NearestNeighboursSearchStruct Public Member Functions inherited from cloudViewer::DgmOctree::NearestNeighboursSearchStruct | |
| NearestNeighboursSearchStruct () | |
| Default constructor. More... | |
Public Attributes | |
| bool | ready |
| Whether pointsInSphericalNeighbourhood is ready or not. More... | |
| Public Attributes inherited from cloudViewer::DgmOctree::NearestNeighboursSearchStruct | |
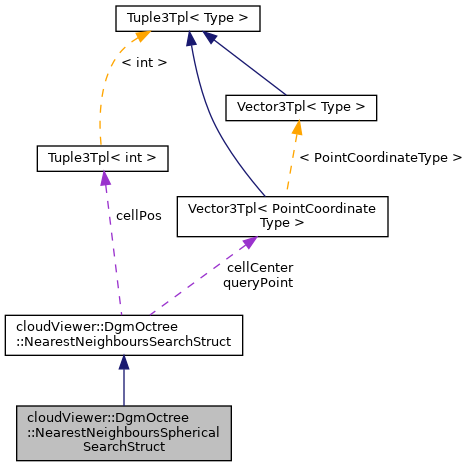
| CCVector3 | queryPoint |
| Query point. More... | |
| unsigned char | level |
| Level of subdivision of the octree at which to start the search. More... | |
| unsigned | minNumberOfNeighbors |
| Minimal number of neighbours to find. More... | |
| Tuple3i | cellPos |
| Position in the octree of the cell including the query point. More... | |
| CCVector3 | cellCenter |
| Coordinates of the center of the cell including the query point. More... | |
| double | maxSearchSquareDistd |
| Maximum neihgbours distance. More... | |
| cellIndexesContainer | minimalCellsSetToVisit |
| NeighboursSet | pointsInNeighbourhood |
| int | alreadyVisitedNeighbourhoodSize |
| unsigned | theNearestPointIndex |
| The nearest point. More... | |
Definition at line 247 of file DgmOctree.h.
|
inline |
Definition at line 285 of file DgmOctree.h.
|
inline |
Updates maxD2 and minD2 with search radius and cellSize.
Definition at line 270 of file DgmOctree.h.
References SQRT_3.
Referenced by cloudViewer::CloudSamplingTools::applyNoiseFilterAtLevel(), cloudViewer::DistanceComputationTools::computeCellHausdorffDistanceWithLocalModel(), cloudViewer::GeometricalAnalysisTools::ComputeGeomCharacteristicAtLevel(), cloudViewer::ScalarFieldTools::computeMeanGradientOnPatch(), and cloudViewer::GeometricalAnalysisTools::FlagDuplicatePointsInACellAtLevel().
| bool cloudViewer::DgmOctree::NearestNeighboursSphericalSearchStruct::ready |
Whether pointsInSphericalNeighbourhood is ready or not.
Definition at line 267 of file DgmOctree.h.