|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "cloudViewer/t/pipelines/kernel/RGBDOdometry.h"#include "cloudViewer/core/CUDAUtils.h"#include "cloudViewer/t/pipelines/kernel/RGBDOdometryImpl.h"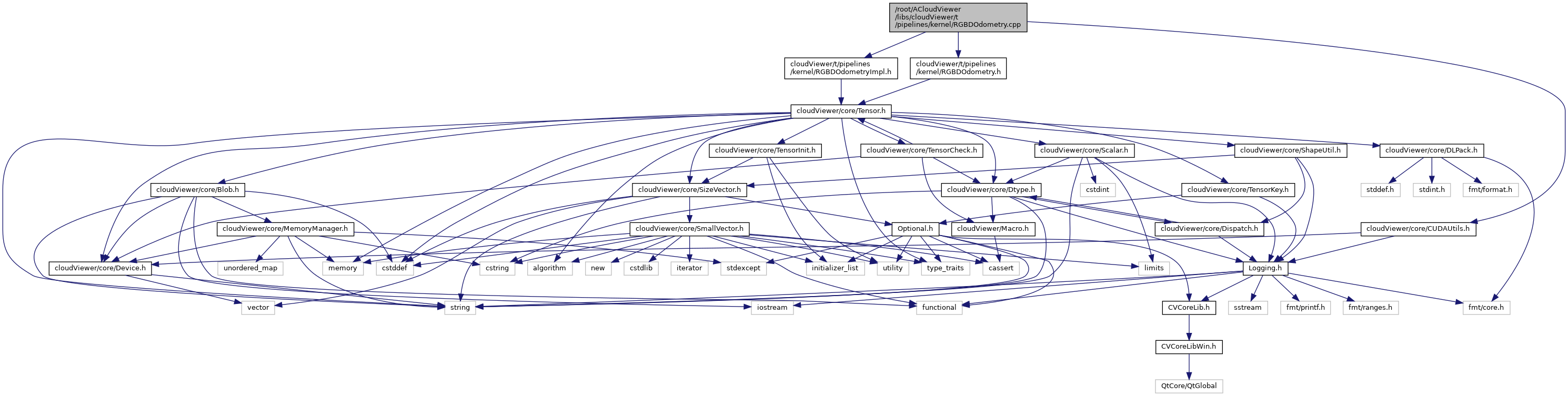
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::t | |
| cloudViewer::t::pipelines | |
| cloudViewer::t::pipelines::kernel | |
| cloudViewer::t::pipelines::kernel::odometry | |
Functions | |
| void | cloudViewer::t::pipelines::kernel::odometry::ComputeOdometryResultPointToPlane (const core::Tensor &source_vertex_map, const core::Tensor &target_vertex_map, const core::Tensor &target_normal_map, const core::Tensor &intrinsics, const core::Tensor &init_source_to_target, core::Tensor &delta, float &inlier_residual, int &inlier_count, const float depth_outlier_trunc, const float depth_huber_delta) |
| void | cloudViewer::t::pipelines::kernel::odometry::ComputeOdometryResultIntensity (const core::Tensor &source_depth, const core::Tensor &target_depth, const core::Tensor &source_intensity, const core::Tensor &target_intensity, const core::Tensor &target_intensity_dx, const core::Tensor &target_intensity_dy, const core::Tensor &source_vertex_map, const core::Tensor &intrinsics, const core::Tensor &init_source_to_target, core::Tensor &delta, float &inlier_residual, int &inlier_count, const float depth_outlier_trunc, const float intensity_huber_delta) |
| void | cloudViewer::t::pipelines::kernel::odometry::ComputeOdometryResultHybrid (const core::Tensor &source_depth, const core::Tensor &target_depth, const core::Tensor &source_intensity, const core::Tensor &target_intensity, const core::Tensor &target_depth_dx, const core::Tensor &target_depth_dy, const core::Tensor &target_intensity_dx, const core::Tensor &target_intensity_dy, const core::Tensor &source_vertex_map, const core::Tensor &intrinsics, const core::Tensor &init_source_to_target, core::Tensor &delta, float &inlier_residual, int &inlier_count, const float depth_outlier_trunc, const float depth_huber_delta, const float intensity_huber_delta) |
| void | cloudViewer::t::pipelines::kernel::odometry::ComputeOdometryInformationMatrix (const core::Tensor &source_vertex_map, const core::Tensor &target_vertex_map, const core::Tensor &intrinsic, const core::Tensor &source_to_target, const float square_dist_thr, core::Tensor &information) |