|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <pybind11/pybind11.h>#include <pybind11/stl.h>#include <pybind11/stl_bind.h>#include <ecvPointCloud.h>#include <ecvProgressDialog.h>#include <ecvRasterGrid.h>#include "../casters.h"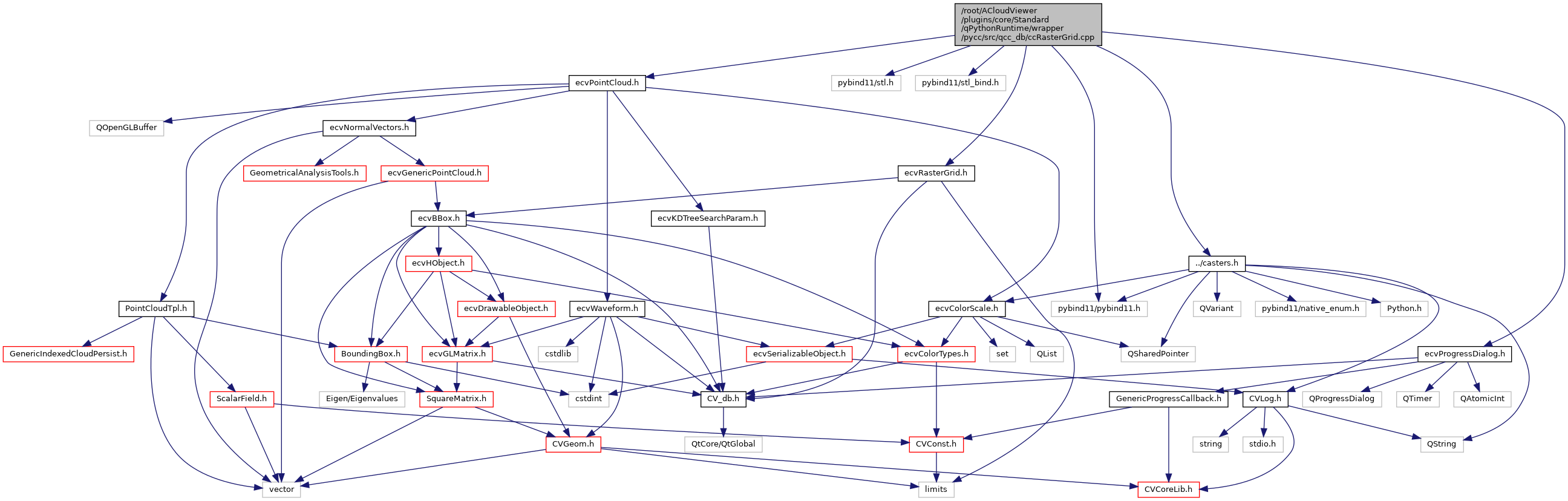
Go to the source code of this file.
Functions | |
| void | define_ccRasterGrid (py::module &m) |
| void define_ccRasterGrid | ( | py::module & | m | ) |
Definition at line 21 of file ccRasterGrid.cpp.
References ccRasterCell::color, ccRasterGrid::computeCellCenter(), ccRasterGrid::computeCellPos(), ccRasterGrid::ComputeGridSize(), ccRasterGrid::convertToCloud(), ccRasterGrid::fillEmptyCells(), ccRasterGrid::fillWith(), ccRasterGrid::GetDefaultFieldName(), ccRasterGrid::gridStep, ccRasterCell::h, ccRasterGrid::hasColors, ccRasterGrid::height, ccRasterGrid::isValid(), ccRasterCell::maxHeight, ccRasterGrid::maxHeight, ccRasterGrid::meanHeight, ccRasterGrid::minCorner, ccRasterCell::minHeight, ccRasterGrid::minHeight, ccRasterCell::nbPoints, ccRasterGrid::nonEmptyCellCount, ccRasterCell::pointIndex, ccRasterGrid::reset(), ccRasterGrid::setValid(), ccRasterGrid::updateCellStats(), ccRasterGrid::updateNonEmptyCellCount(), ccRasterGrid::valid, ccRasterGrid::validCellCount, and ccRasterGrid::width.
Referenced by define_qcc_db().