|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "cloudViewer/t/pipelines/slac/SLACOptimizer.h"#include <FileSystem.h>#include "cloudViewer/core/EigenConverter.h"#include "cloudViewer/core/TensorCheck.h"#include "cloudViewer/core/nns/NearestNeighborSearch.h"#include "cloudViewer/io/PointCloudIO.h"#include "cloudViewer/t/pipelines/slac/FillInLinearSystemImpl.h"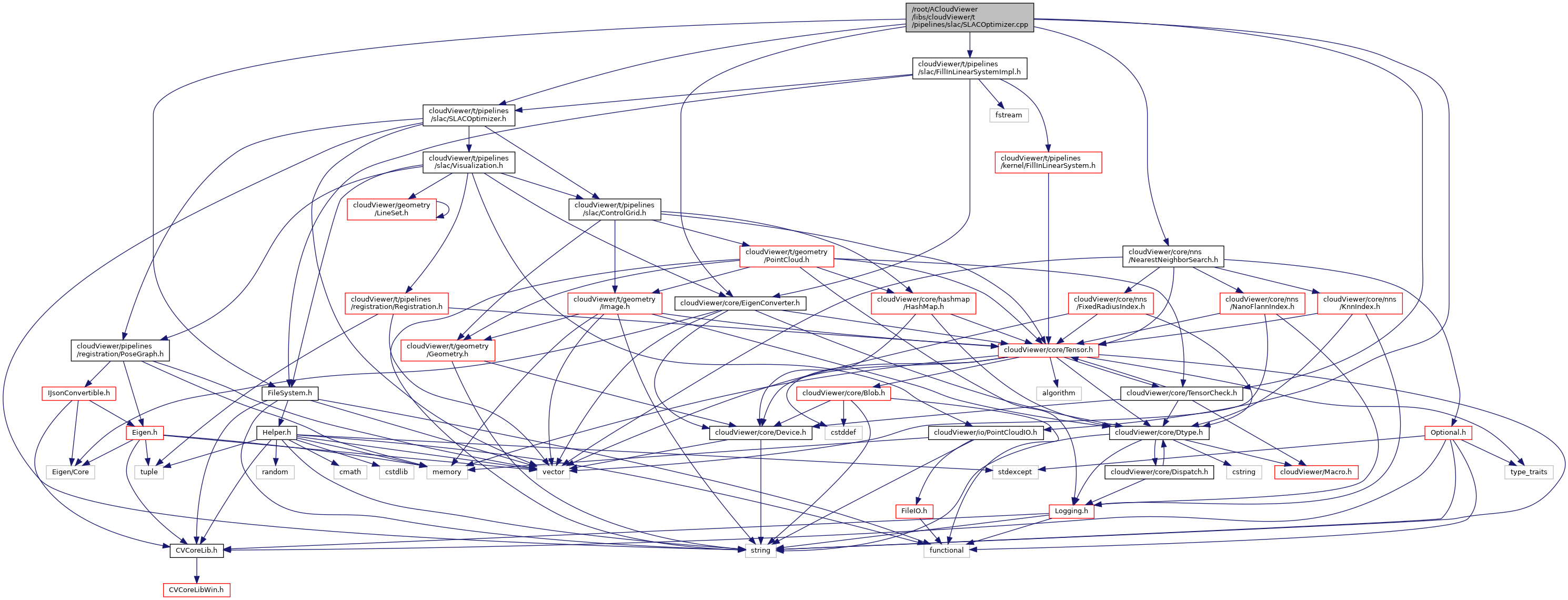
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::t | |
| cloudViewer::t::pipelines | |
| cloudViewer::t::pipelines::slac | |
Functions | |
| static std::vector< std::string > | cloudViewer::t::pipelines::slac::PreprocessPointClouds (const std::vector< std::string > &fnames, const SLACOptimizerParams ¶ms) |
| static core::Tensor | cloudViewer::t::pipelines::slac::ConvertCorrespondencesTargetIndexedToCx2Form (const core::Tensor &target_correspondences) |
| static core::Tensor | cloudViewer::t::pipelines::slac::GetCorrespondenceSetForPointCloudPair (int i, int j, PointCloud &tpcd_i, PointCloud &tpcd_j, const core::Tensor &T_i, const core::Tensor &T_j, const core::Tensor &T_ij, float distance_threshold, float fitness_threshold, bool debug) |
| void | cloudViewer::t::pipelines::slac::SaveCorrespondencesForPointClouds (const std::vector< std::string > &fnames_processed, const PoseGraph &fragment_pose_graph, const SLACOptimizerParams ¶ms=SLACOptimizerParams(), const SLACDebugOption &debug_option=SLACDebugOption()) |
| Read pose graph containing loop closures and odometry to compute putative correspondences between pairs of pointclouds. More... | |
| static void | cloudViewer::t::pipelines::slac::InitializeControlGrid (ControlGrid &ctr_grid, const std::vector< std::string > &fnames) |
| static void | cloudViewer::t::pipelines::slac::UpdatePoses (PoseGraph &fragment_pose_graph, core::Tensor &delta) |
| static void | cloudViewer::t::pipelines::slac::UpdateControlGrid (ControlGrid &ctr_grid, core::Tensor &delta) |
| std::pair< PoseGraph, ControlGrid > | cloudViewer::t::pipelines::slac::RunSLACOptimizerForFragments (const std::vector< std::string > &fragment_filenames, const PoseGraph &fragment_pose_graph, const SLACOptimizerParams ¶ms=SLACOptimizerParams(), const SLACDebugOption &debug_option=SLACDebugOption()) |
| Simultaneous Localization and Calibration: Self-Calibration of Consumer Depth Cameras, CVPR 2014 Qian-Yi Zhou and Vladlen Koltun Estimate a shared control grid for all fragments for scene reconstruction, implemented in https://github.com/qianyizh/ElasticReconstruction. More... | |
| PoseGraph | cloudViewer::t::pipelines::slac::RunRigidOptimizerForFragments (const std::vector< std::string > &fragment_filenames, const PoseGraph &fragment_pose_graph, const SLACOptimizerParams ¶ms=SLACOptimizerParams(), const SLACDebugOption &debug_option=SLACDebugOption()) |
| Extended ICP to simultaneously align multiple point clouds with dense pairwise point-to-plane distances. More... | |