|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include <Parallel.h>#include <tbb/parallel_for.h>#include <tbb/parallel_reduce.h>#include <cmath>#include <functional>#include <vector>#include "cloudViewer/core/Dispatch.h"#include "cloudViewer/core/ParallelFor.h"#include "cloudViewer/core/Tensor.h"#include "cloudViewer/t/pipelines/kernel/RegistrationImpl.h"#include "cloudViewer/t/pipelines/kernel/TransformationConverter.h"#include "cloudViewer/t/pipelines/registration/RobustKernel.h"#include "cloudViewer/t/pipelines/registration/RobustKernelImpl.h"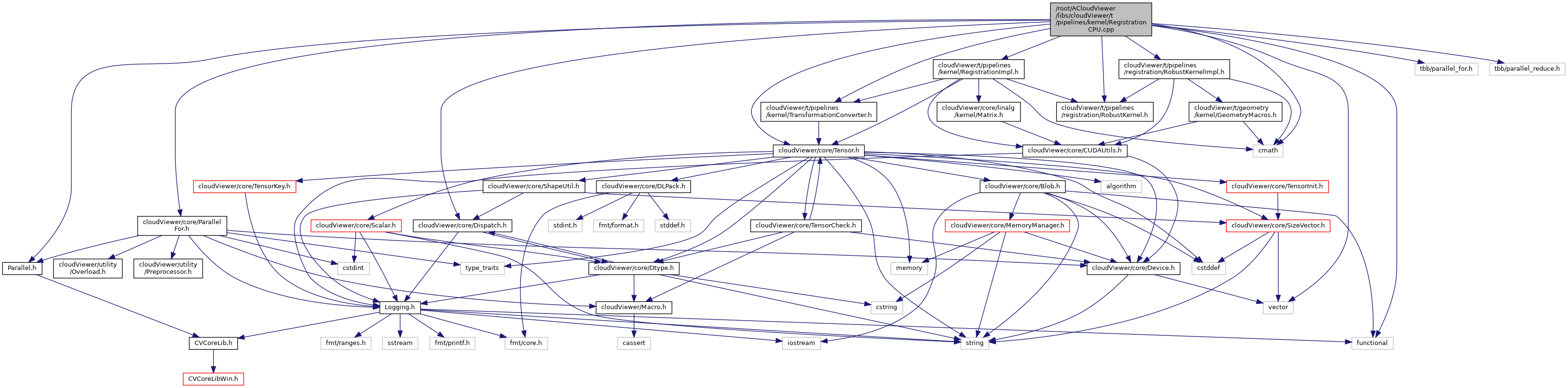
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::t | |
| cloudViewer::t::pipelines | |
| cloudViewer::t::pipelines::kernel | |
Functions | |
| template<typename scalar_t , typename func_t > | |
| static void | cloudViewer::t::pipelines::kernel::ComputePosePointToPlaneKernelCPU (const scalar_t *source_points_ptr, const scalar_t *target_points_ptr, const scalar_t *target_normals_ptr, const int64_t *correspondence_indices, const int n, scalar_t *global_sum, func_t GetWeightFromRobustKernel) |
| void | cloudViewer::t::pipelines::kernel::ComputePosePointToPlaneCPU (const core::Tensor &source_points, const core::Tensor &target_points, const core::Tensor &target_normals, const core::Tensor &correspondence_indices, core::Tensor &pose, float &residual, int &inlier_count, const core::Dtype &dtype, const core::Device &device, const registration::RobustKernel &kernel) |
| template<typename scalar_t , typename funct_t > | |
| static void | cloudViewer::t::pipelines::kernel::ComputePoseColoredICPKernelCPU (const scalar_t *source_points_ptr, const scalar_t *source_colors_ptr, const scalar_t *target_points_ptr, const scalar_t *target_normals_ptr, const scalar_t *target_colors_ptr, const scalar_t *target_color_gradients_ptr, const int64_t *correspondence_indices, const scalar_t &sqrt_lambda_geometric, const scalar_t &sqrt_lambda_photometric, const int n, scalar_t *global_sum, funct_t GetWeightFromRobustKernel) |
| void | cloudViewer::t::pipelines::kernel::ComputePoseColoredICPCPU (const core::Tensor &source_points, const core::Tensor &source_colors, const core::Tensor &target_points, const core::Tensor &target_normals, const core::Tensor &target_colors, const core::Tensor &target_color_gradients, const core::Tensor &correspondence_indices, core::Tensor &pose, float &residual, int &inlier_count, const core::Dtype &dtype, const core::Device &device, const registration::RobustKernel &kernel, const double &lambda_geometric) |
| template<typename scalar_t , typename funct1_t , typename funct2_t > | |
| static void | cloudViewer::t::pipelines::kernel::ComputePoseDopplerICPKernelCPU (const scalar_t *source_points_ptr, const scalar_t *source_dopplers_ptr, const scalar_t *source_directions_ptr, const scalar_t *target_points_ptr, const scalar_t *target_normals_ptr, const int64_t *correspondence_indices, const scalar_t *R_S_to_V, const scalar_t *r_v_to_s_in_V, const scalar_t *v_s_in_S, const bool reject_dynamic_outliers, const scalar_t doppler_outlier_threshold, const scalar_t sqrt_lambda_geometric, const scalar_t sqrt_lambda_doppler, const scalar_t sqrt_lambda_doppler_by_dt, const int n, scalar_t *global_sum, funct1_t GetWeightFromRobustKernelFirst, funct2_t GetWeightFromRobustKernelSecond) |
| template<typename scalar_t > | |
| void | cloudViewer::t::pipelines::kernel::PreComputeForDopplerICPKernelCPU (const scalar_t *R_S_to_V, const scalar_t *r_v_to_s_in_V, const scalar_t *w_v_in_V, const scalar_t *v_v_in_V, scalar_t *v_s_in_S) |
| void | cloudViewer::t::pipelines::kernel::ComputePoseDopplerICPCPU (const core::Tensor &source_points, const core::Tensor &source_dopplers, const core::Tensor &source_directions, const core::Tensor &target_points, const core::Tensor &target_normals, const core::Tensor &correspondence_indices, core::Tensor &output_pose, float &residual, int &inlier_count, const core::Dtype &dtype, const core::Device &device, const core::Tensor &R_S_to_V, const core::Tensor &r_v_to_s_in_V, const core::Tensor &w_v_in_V, const core::Tensor &v_v_in_V, const double period, const bool reject_dynamic_outliers, const double doppler_outlier_threshold, const registration::RobustKernel &kernel_geometric, const registration::RobustKernel &kernel_doppler, const double lambda_doppler) |
| template<typename scalar_t > | |
| static void | cloudViewer::t::pipelines::kernel::Get3x3SxyLinearSystem (const scalar_t *source_points_ptr, const scalar_t *target_points_ptr, const int64_t *correspondence_indices, const int &n, const core::Dtype &dtype, const core::Device &device, core::Tensor &Sxy, core::Tensor &target_mean, core::Tensor &source_mean, int &inlier_count) |
| void | cloudViewer::t::pipelines::kernel::ComputeRtPointToPointCPU (const core::Tensor &source_points, const core::Tensor &target_points, const core::Tensor &corres, core::Tensor &R, core::Tensor &t, int &inlier_count, const core::Dtype &dtype, const core::Device &device) |
| template<typename scalar_t > | |
| void | cloudViewer::t::pipelines::kernel::ComputeInformationMatrixKernelCPU (const scalar_t *target_points_ptr, const int64_t *correspondence_indices, const int n, scalar_t *global_sum) |
| void | cloudViewer::t::pipelines::kernel::ComputeInformationMatrixCPU (const core::Tensor &target_points, const core::Tensor &correspondence_indices, core::Tensor &information_matrix, const core::Dtype &dtype, const core::Device &device) |