|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "PCV.h"#include "PCVContext.h"#include <QString>#include <assert.h>#include <string.h>#include <algorithm>#include <vector>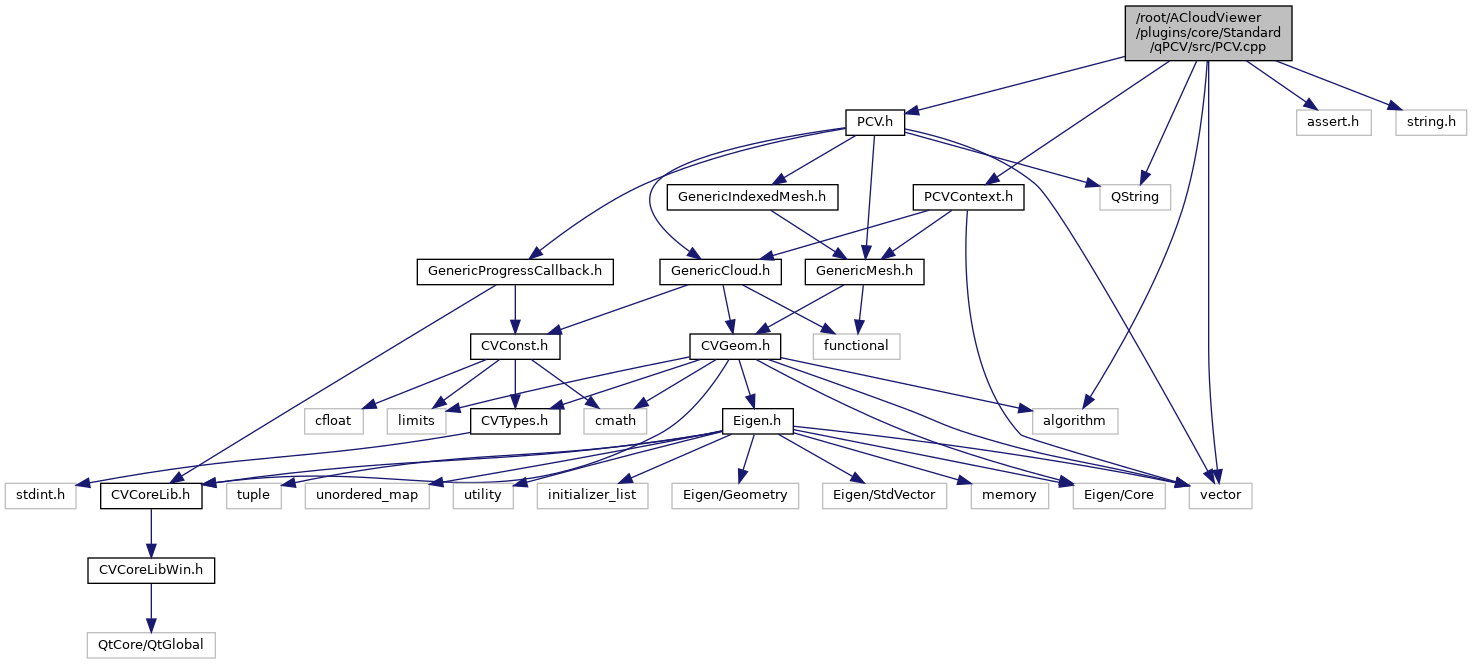
Go to the source code of this file.
Functions | |
| static int | gcd (int num1, int num2) |
| static bool | SampleSphere (unsigned N, std::vector< CCVector3 > &dirs) |
| Sample points on the unit sphere. More... | |
|
static |
Definition at line 29 of file PCV.cpp.
Referenced by SampleSphere().
|
static |
Sample points on the unit sphere.
Transcripted from MATLAB's script "partsphere.m" by Paul Leopardi, 2003-10-13, for UNSW School of Mathematics.
As points are sampled on the unit sphere, they can also be considered as directions. WARNING: returned array is on the user responsibilty!
| N | number of desired sampled directions | |
| [out] | dirs | set of N points |
Definition at line 47 of file PCV.cpp.
References cloudViewer::utility::ceil(), cloudViewer::utility::floor(), gcd(), M_PI, max(), and offset.
Referenced by PCV::GenerateRays().