|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "pipelines/registration/GlobalOptimization.h"#include <Eigen.h>#include <Logging.h>#include <Timer.h>#include <Eigen/Dense>#include <Eigen/Sparse>#include <tuple>#include <vector>#include "pipelines/registration/GlobalOptimizationConvergenceCriteria.h"#include "pipelines/registration/GlobalOptimizationMethod.h"#include "pipelines/registration/PoseGraph.h"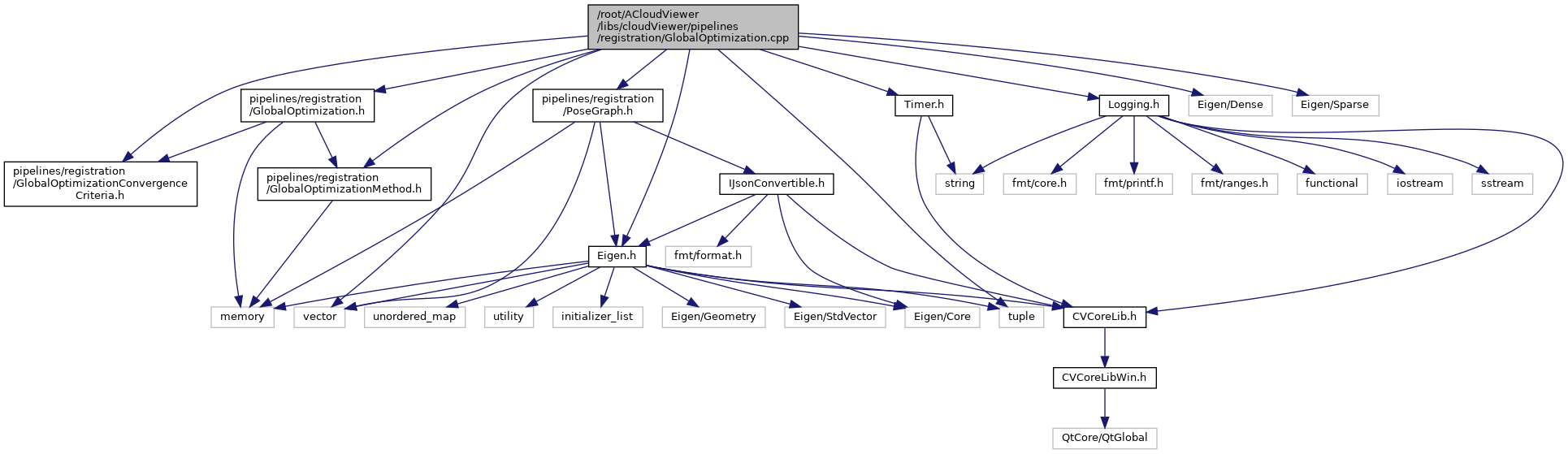
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::pipelines | |
| cloudViewer::pipelines::registration | |
Functions | |
| Eigen::Vector6d | cloudViewer::pipelines::registration::GetLinearized6DVector (const Eigen::Matrix4d &input) |
| Eigen::Vector6d | cloudViewer::pipelines::registration::GetMisalignmentVector (const Eigen::Matrix4d &X_inv, const Eigen::Matrix4d &Ts, const Eigen::Matrix4d &Tt_inv) |
| std::tuple< Eigen::Matrix4d, Eigen::Matrix4d, Eigen::Matrix4d > | cloudViewer::pipelines::registration::GetRelativePoses (const PoseGraph &pose_graph, int edge_id) |
| std::tuple< Eigen::Matrix6d, Eigen::Matrix6d > | cloudViewer::pipelines::registration::GetJacobian (const Eigen::Matrix4d &X_inv, const Eigen::Matrix4d &Ts, const Eigen::Matrix4d &Tt_inv) |
| int | cloudViewer::pipelines::registration::UpdateConfidence (PoseGraph &pose_graph, const Eigen::VectorXd &zeta, const double line_process_weight, const GlobalOptimizationOption &option) |
| double | cloudViewer::pipelines::registration::ComputeResidual (const PoseGraph &pose_graph, const Eigen::VectorXd &zeta, const double line_process_weight, const GlobalOptimizationOption &option) |
| Function to compute residual defined in [Choi et al 2015] See Eq (9). More... | |
| Eigen::VectorXd | cloudViewer::pipelines::registration::ComputeZeta (const PoseGraph &pose_graph) |
| Function to compute residual defined in [Choi et al 2015] See Eq (6). More... | |
| std::tuple< Eigen::MatrixXd, Eigen::VectorXd > | cloudViewer::pipelines::registration::ComputeLinearSystem (const PoseGraph &pose_graph, const Eigen::VectorXd &zeta) |
| Eigen::VectorXd | cloudViewer::pipelines::registration::UpdatePoseVector (const PoseGraph &pose_graph) |
| std::shared_ptr< PoseGraph > | cloudViewer::pipelines::registration::UpdatePoseGraph (const PoseGraph &pose_graph, const Eigen::VectorXd delta) |
| bool | cloudViewer::pipelines::registration::CheckRightTerm (const Eigen::VectorXd &right_term, const GlobalOptimizationConvergenceCriteria &criteria) |
| bool | cloudViewer::pipelines::registration::CheckRelativeIncrement (const Eigen::VectorXd &delta, const Eigen::VectorXd &x, const GlobalOptimizationConvergenceCriteria &criteria) |
| bool | cloudViewer::pipelines::registration::CheckRelativeResidualIncrement (double current_residual, double new_residual, const GlobalOptimizationConvergenceCriteria &criteria) |
| bool | cloudViewer::pipelines::registration::CheckResidual (double residual, const GlobalOptimizationConvergenceCriteria &criteria) |
| bool | cloudViewer::pipelines::registration::CheckMaxIteration (int iteration, const GlobalOptimizationConvergenceCriteria &criteria) |
| bool | cloudViewer::pipelines::registration::CheckMaxIterationLM (int iteration, const GlobalOptimizationConvergenceCriteria &criteria) |
| double | cloudViewer::pipelines::registration::ComputeLineProcessWeight (const PoseGraph &pose_graph, const GlobalOptimizationOption &option) |
| void | cloudViewer::pipelines::registration::CompensateReferencePoseGraphNode (PoseGraph &pose_graph_new, const PoseGraph &pose_graph_orig, int reference_node) |
| bool | cloudViewer::pipelines::registration::ValidatePoseGraphConnectivity (const PoseGraph &pose_graph, bool ignore_uncertain_edges=false) |
| bool | cloudViewer::pipelines::registration::ValidatePoseGraph (const PoseGraph &pose_graph) |
| std::shared_ptr< PoseGraph > | cloudViewer::pipelines::registration::CreatePoseGraphWithoutInvalidEdges (const PoseGraph &pose_graph, const GlobalOptimizationOption &option) |
| void | cloudViewer::pipelines::registration::GlobalOptimization (PoseGraph &pose_graph, const GlobalOptimizationMethod &method, const GlobalOptimizationConvergenceCriteria &criteria, const GlobalOptimizationOption &option) |
Variables | |
| const std::vector< Eigen::Matrix4d, utility::Matrix4d_allocator > | cloudViewer::pipelines::registration::jacobian_operator |