|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
|
ACloudViewer
3.9.4
A Modern Library for 3D Data Processing
|
#include "t/pipelines/odometry/RGBDOdometry.h"#include <benchmark/benchmark.h>#include "camera/PinholeCameraIntrinsic.h"#include "cloudViewer/core/CUDAUtils.h"#include "cloudViewer/core/Tensor.h"#include "cloudViewer/data/Dataset.h"#include "cloudViewer/t/geometry/Image.h"#include "cloudViewer/t/geometry/PointCloud.h"#include "cloudViewer/t/io/ImageIO.h"#include "cloudViewer/t/io/PointCloudIO.h"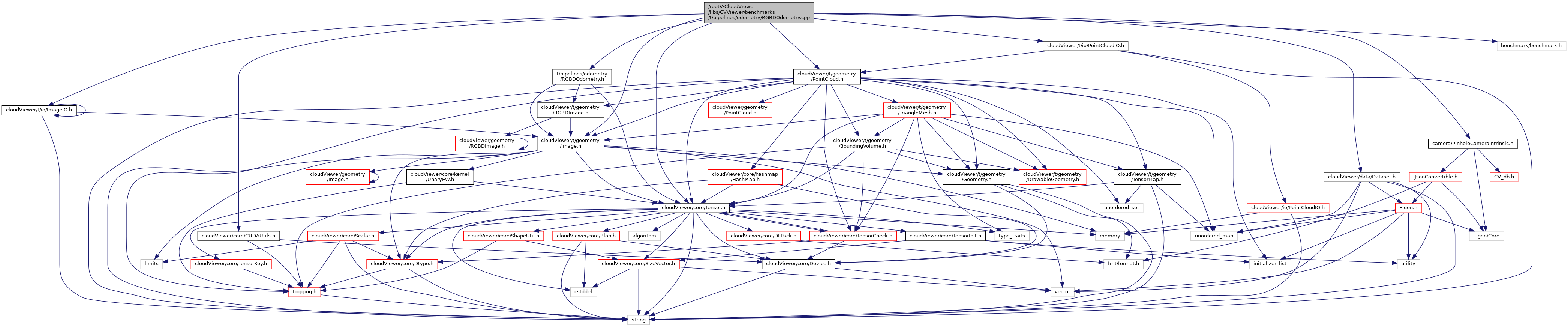
Go to the source code of this file.
Namespaces | |
| cloudViewer | |
| Generic file read and write utility for python interface. | |
| cloudViewer::t | |
| cloudViewer::t::pipelines | |
| cloudViewer::t::pipelines::odometry | |
Functions | |
| static core::Tensor | cloudViewer::t::pipelines::odometry::CreateIntrisicTensor () |
| static void | cloudViewer::t::pipelines::odometry::ComputeOdometryResultPointToPlane (benchmark::State &state, const core::Device &device) |
| static void | cloudViewer::t::pipelines::odometry::RGBDOdometryMultiScale (benchmark::State &state, const core::Device &device, const t::pipelines::odometry::Method &method) |
| cloudViewer::t::pipelines::odometry::Unit (benchmark::kMillisecond) | |
| cloudViewer::t::pipelines::odometry::BENCHMARK_CAPTURE (RGBDOdometryMultiScale, Hybrid_CPU, core::Device("CPU:0"), t::pipelines::odometry::Method::Hybrid) -> Unit(benchmark::kMillisecond) | |
| cloudViewer::t::pipelines::odometry::BENCHMARK_CAPTURE (RGBDOdometryMultiScale, Intensity_CPU, core::Device("CPU:0"), t::pipelines::odometry::Method::Intensity) -> Unit(benchmark::kMillisecond) | |
| cloudViewer::t::pipelines::odometry::BENCHMARK_CAPTURE (RGBDOdometryMultiScale, PointToPlane_CPU, core::Device("CPU:0"), t::pipelines::odometry::Method::PointToPlane) -> Unit(benchmark::kMillisecond) | |